

bmp
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
151 |
|
|
|
|
|
|
|
|
|
|
Таблиця 9.1 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ст. |
l (м) |
EA |
Np (кН) |
|
Ni |
|
Ni N p |
|
l |
|
|
|
|||
|
|
|
|
EA |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
2 |
|
3 |
|
4 |
|
|
5 |
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
A-1 |
5.000 |
2.000 |
-20.000 |
|
-0.833 |
41.650 |
|
|
|
||||||
|
|
1-2 |
4.000 |
2.000 |
-16.000 |
|
-1.333 |
42.656 |
|
|
|
||||||
|
|
2-3 |
4.000 |
2.000 |
-16.000 |
|
-1.333 |
42.656 |
|
|
|
||||||
|
|
3-B |
5.000 |
2.000 |
-20.000 |
|
-0.833 |
41.650 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
A-4 |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
||||||
|
|
4-5 |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
||||||
|
|
5-6 |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
||||||
|
|
6-B |
4.000 |
1.000 |
16.000 |
|
0.667 |
42.688 |
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1-4 |
3.000 |
1.000 |
0.000 |
|
0.000 |
0.000 |
|
|
|
|
|||||
|
|
2-5 |
3.000 |
1.000 |
0.000 |
|
0.000 |
0.000 |
|
|
|
|
|||||
|
|
3-6 |
3.000 |
1.000 |
1.000 |
|
0.000 |
0.000 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
4-5 |
5.000 |
1.000 |
0.000 |
|
0.833 |
0.000 |
|
|
|
|
|||||
|
|
3-5 |
5.000 |
1.000 |
0.000 |
|
0.833 |
0.000 |
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
Усього: |
|
|
|
339,364 |
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Отже, шукане переміщення |
ip |
339,364 |
. |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
EA |
|
|
|
|
|
|
|
|
|
|
|
|
9.4. Визначення переміщення від дії температури |
|
|
|
|
|
|
|
||||||||||
Визначити |
горизонтальне |
переміщення |
опори |
C |
рами |
|
(рис.9.5,а), |
що |
спричиняється |
||||||||
представленим |
на рисунку температурним |
полем. |
Всі |
стержні мають |
прямокутний переріз |
||||||||||||
(рис.9.5,б). Коефіцієнт лінійного розширення матеріалу 1,2 10 5 град 1 .
Кінематичний аналіз рами
Рама являє собою ламаний стержень ABC, який приєднується до основи трьома шарнірнорухомим опорами. Таким чином, можна вважати, що рама має два диска і три кінематичні в’язі, тобто D = 2, C = 3, Ш = 0, П = 0, В = 0. За формулою Чебишова (2.1)
Г 3 2 2 0 3 0 2 0 3 3 0.
Структурно рама утворена з’єднанням двох дисків трьома кінематичними в’язями:

152
DABC D"земля" Д .
CA,CB ,CC
Таким чином, рама геометрично незмінювана і статично визначувана.
аt2 = -50
t1= 00 |
t3= 200 |
 A
A
6 м
в
E
A
г
E
A
 V = 0,3
V = 0,3
A
д
е
0,3
 0,3
0,3
Призначення допоміжного стану
t2 = -50 |
C |
|
|
|
|
б |
|
t =100 |
3м |
0,4м |
|
4 |
|||
|
|
B |
0,2 м |
|
4 м
C P=1
Допоміжний стан i
B
C P=1
VC = 0,3 
B  HB = 1
HB = 1
1,2
3,0
 1,8
1,8
Еп.Mі
1,0 1,0
Еп.Nі
Рис.9.5
Допоміжний стан і для визначення горизонтального переміщення опори С утворюється прикладенням в опорі С горизонтальної безрозмірної сили, яка дорівнює одиниці (рис.9.5,в).
153
Статичний розрахунок рами в допоміжному стані
Реакції опор в допоміжному стані і показано на рис.9.5,г. Для їх обчислення складаються і розв’язуються рівняння рівноваги:
M A 0 |
VC 10 1 3 0 |
|
|
VC 0,3; |
|||||
|
0 |
HB 1 0 |
HB |
1; |
|||||
Fx |
|||||||||
|
0 |
VA 0,3 0 |
|
|
|
|
0,3. |
||
Fy |
|
VA |
|||||||
Епюра згинальних моментів |
|
|
i |
і поздовжніх сил |
|
|
|||
M |
Ni у допоміжному стані побудовано на |
||||||||
рис.9.5,д і 9.5,е відповідно.
Обчислення переміщення
Обчислення виконуємо за формулою (9.7):
|
|
|
|
1 |
|
|
|
|
|
|
50 200 |
|
|
|
1 |
|
|
|
|
50 100 |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
it |
|
|
|
|
1,8м 6м |
|
|
|
|
|
|
|
|
|
|
|
1,2м 4м |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
2 |
|
|
|
|
|
|
0,4м |
|
|
|
|
|
|
2 |
|
|
|
|
|
0,4м |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
1 |
|
|
|
200 10 |
0 |
|
|
|
|
0 |
0 20 |
0 |
|
|
|
|
50 10 |
0 |
|
|||||||||
|
|
|
|
|
|
|
3м 3м |
|
|
|
|
|
|
|
|
0,3 3м |
|
|
|
|
|
|
1 4м |
|
|
|
|||||||
|
|
|
2 |
|
|
|
0,2м |
|
|
|
|
|
|
2 |
|
2 |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
град |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
453,5 |
453,5 1,2 10 5 м 0,5442 |
10 2 м. |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
м |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
9.5. Визначення переміщення від змушених переміщень опор
Визначити вертикальне переміщення вузла D рами (рис.9.6,а), яке визначається змушеними переміщеннями опор. Переміщення показано на рисунку подвійними стрілками.
Кінематичний аналіз
Рама складається з двох дисків і основи, які поєднуються за допомогою припайки в опорі А, шарніру у вузлі С та кінематичної в’язі у шарнірно нерухомій опорі В. Отже, рама має таку кількість елементів: D = 3, В = 0, П = 1, Ш = 1, С = 1. Ступінь геометричної змінюваності
Г 3 3 2 0 3 1 2 1 1 3 0.
154
C |
|
D |
|
а |
|
C |
3= 0,01 рад |
3 м |
|
||
|
|
B |
|
|
C4= 0,15 м |
C 2= 0,1 м |
|
2 м |
|
|
|
A |
|
|
C 1= 0,2 м |
R 3 |
|
4 м |
||
|
P = 1
C  D
D
б
B  R4
R4
A

 R1
R1
R2
VC |
|
|
P = 1 |
|
|
P = 1 |
C |
D |
C |
|
D |
||
HC |
|
в |
|
|
д |
|
|
1 |
|
|
|
||
|
|
|
|
|
|
|
C |
1,333 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
B |
HB |
|
B |
1,333 |
|
|
|
|
|
||
г |
|
|
|
|
|
|
|
|
|
|
A |
1,333 |
|
HA |
A |
|
|
|
6,666 |
|
|
VA |
|
|
1 |
|
|
|
M A |
|
|
|
|
|
|
|
|
|
|
|
Рис.9.6
Схема рами утворюється за два кроки:
1.DAC ПD"земля" ДI ;
2.ДI DCDBA ДII. ШC ,CB
Таким чином, рама геометрично незмінювана і статично визначувана.
Призначення допоміжного стану
Для визначення вертикального переміщення вузла D прикладаємо до нього вертикальну силу, яка дорівнює одиниці (рис.9.6,б). Тут також позначено ті реакції опор, які відповідають змушеним переміщенням.
155
Статичний розрахунок рами в допоміжному стані
Визначаємо опорні реакції другого поверху (рис.9.6,в).
Fy 0 |
VC 1 0 VC 1; |
|
||
|
|
|
|
|
MC 0 |
|
HB 3 1 4 0 |
|
HB 1,333; |
|
|
|
|
|
Fx 0 |
|
HC 1,333 0 |
|
HC 1,333. |
Опорні реакції першого поверху (рис.9.6,г). |
||||
Fx 0 |
|
H A 1,333 0 |
|
H A 1,333; |
|
|
|
|
|
Fy 0 |
VA 1 0 VA 1; |
|
||
|
|
|
|
|
M A 0 |
|
M A 1,333 5 0 M A 6,666. |
||
Обчислення переміщення
Шукане переміщення визначаємо за формулою (9.8):
ic Rjicj 1,333 0,1м 0,1 0,2 м 6,666 м 0,01 1,333 0,15 м 0,353 м.
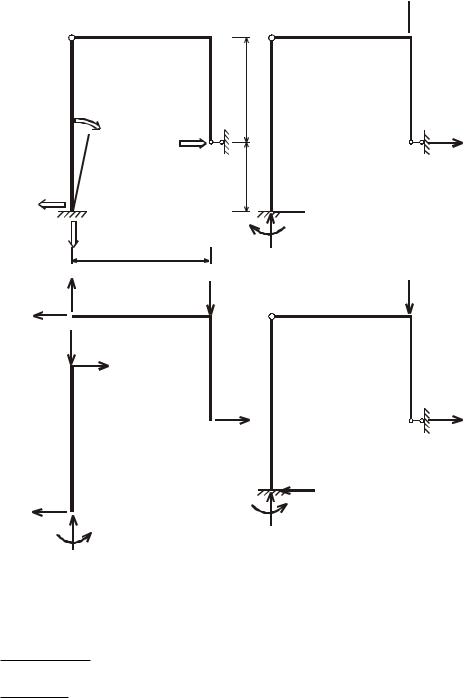
9.6. Задачі для самостійного розв’язування
9.6.1. Визначити наближення перерізів C i B рами (рис.9.7,а).
9.6.2. Визначити за абсолютною величиною взаємний кут повороту стояків рами на опорах A i B
(рис.9.7,а).
9.6.3. Визначити за абсолютною величиною вертикальне переміщення опори А (рис.9.7,б).
9.6.4. Визначити за абсолютною величиною взаємний кут повороту стержнів рами в шарнірі С
(рис.9.7,б).
9.6.5. Визначити взаємне розходження шарнірів C i D від дії температури (рис.9.7,в). Поперечні перерізи всіх стержнів мають висоту 0,4 м.
9.6.6. Визначити за абсолютною величиною вертикальне переміщення шарніра С від примусового зміщення опор рами (рис.9.7,г).
156
|
а |
C |
P = 30 кН |
|
|
||
|
|
|
|
|
EI= 1 |
EI = 2 |
EI= 1 |
4 |
|
||
|
A |
|
B |
|
2 |
2 |
2 |
вD -200 E
м |
-100 |
|
|
3 |
|
200 |
-300 |
3 м |
|
|
|
00 A |
C |
B |
|
|
|
200 |
|
|
4 м |
4 м |
|
б |
q = 1,2 кН/м |
C |
|
||
|
EI = 2 |
|
EI = 1 |
EI = 1 |
3 |
A B
4
гC
|
|
D |
3 м |
|
|
|
|
0,1 м |
A |
B |
3 м |
|
|
|
|
|
4 м |
4 м |
0,25 м |
|
0,15 м |
||
|
|
|
|
|
0,18 м |
|
|
Рис.9.7
10. Розрахунок статично невизначуваної рами методом сил
10.1. Короткі теоретичні відомості
Несучі елементи будов та інженерних споруд, які при розрахунку моделюються рамами, повинні зберігати надану їм форму та положення, тобто їх розрахункова схема має бути геометрично незмінюваною і нерухомою. Для виконання цих вимог поєднання окремих дисків конструкції між собою та із “землею” необхідно здійснювати кінематичними в’язями (будь-яка в’язь еквівалентна певній кількості кінематичних в’язей – стержнів), кількість яких не менша суми ступенів вільності окремих складових дисків споруди.
Дослідження співвідношення між кількістю в’язей та дисків проводиться на кількісному етапі кінематичного аналізу. Якщо ступінь геометричної змінюваності, підрахована по формулі Чебишова
Г 3 Д 2В 3П 2Ш С 3 |
(10.1) |
менша за нуль, то система дисків має умовно “зайві” в’язі.
Наявність “зайвих” в’язей забезпечує більшу жорсткість рами та перерозподіл внутрішніх зусиль між її елементами, тому руйнування однієї чи декількох із в’язей не спричинює руйнування конструкції в цілому. Негативним аспектом перенасичення системи дисків в’язями є неможливість визначення внутрішніх зусиль в елементах конструкції, виходячи лише з умов рівноваги.
Система із “зайвими” в’язями статично невизначувана. Число, від’ємне щодо ступеня геометричної змінюваності системи (п Г ), визначає
ступінь статичної невизначуваності.
Для обчислення ступеня статичної невизначуваності рам використовують більш просту формулу.
n 3K Ш, |
(10.2) |
де К – кількість ізольованих контурів рами, яка для плоских стержневих систем визначається кількістю площин, обмежених стержнями рами або стержнями рами і “землею” (“землю” слід вважати одним простим диском); Ш – загальна кількість простих шарнірів, які входять в замкнені контури (разом з опорними та шарнірами, що входять до складу кінематичних в’язей). Один простий шарнір поєднує лише два диски. Шарнір, що поєднує т дисків, еквівалентний т-1 простим шарнірам. Шарнірно нерухому опору можна розглядати як один простий шарнір, а шарнірно рухому – як два простих шарніри.
158
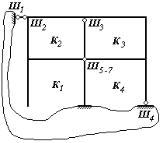
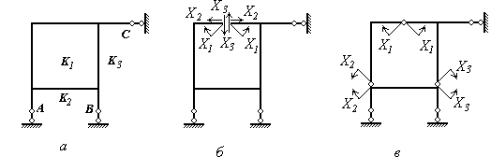
Наприклад, на рис.10.1 зображена рама, що має чотири ізольованих
контури К1, К2 , К3 |
, К4 . Для |
поєднання елементів рами між собою та |
||||
приєднання її до “землі” |
використано сім |
простих |
шарнірівШ1, |
|||
Ш2 , Ш3, Ш4, Ш5, Ш6 |
, Ш7 . |
Таким |
|
чином, |
ступінь |
статичної |
невизначуваності |
системи, |
що |
розглядається, |
дорівнює |
||
|
|
|
|
|
|
Рис. 10.2 |
n 3К Ш 3 4 7 5 .
Отже, зображена на рис.10.1 рама є п’ять разів статично невизначуваною.
Цю задачу можна розв’язати, використовуючи формулу Чебишова (10.1). Задану стержневу систему можна моделювати, як сукупність чотирьох простих дисків (рис.10.2), поєднаних двома
простими припайками П1 і П2 , трьома простими шарнірами Ш1, Ш2 , Ш3 та двома кінематчними в’язями С1 , С2 . Вузли, як місця поєднання лише кінематичних в’язей, в цій розрахунковій схемі відсутні. Тому:
Г 3 4 2 0 3 2 2 3 2 3 5 .
Висновок: n Г ( 5 ) 5 , рама п’ять разів статично невизначувана.
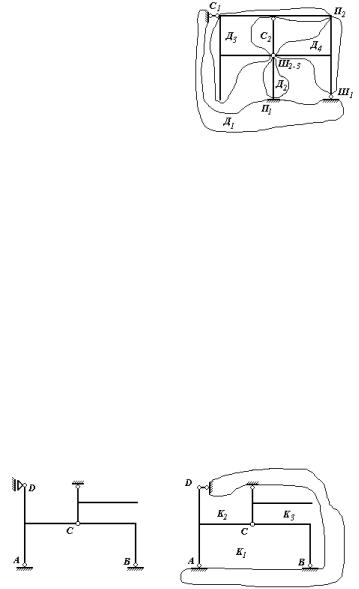
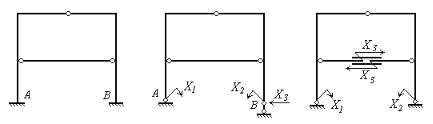
Як інший приклад, розглянуто систему, зображену на рис.10.3,а, яка має три ізольованих контури К1 ,К2 ,К3 .
Шарнірно-рухома опора D еквівалентна |
|
|
двом простим шарнірам; шарнірне поєд- |
|
|
нання трьох дисків в точці С еквівалентне |
|
|
двом простим шарнірам; в опорах А та В – |
|
|
по одному простому шарніру. Загальна кі- |
а |
б |
|
Рис. 10.3 |
|
лькість простих шарнірівШ 7 . Ступінь |
|
|
|
|
|
статичної невизначуваності рами дорівнює |
|
|
n 3К Ш 3 3 7 2 .
Отже, рама двічі статично невизначувана.
Метод сил відноситься до класичних методів розрахунку статично невизначуваних систем. Основна ідея методу полягає у тім, що задана статично невизначувана рама замінюється статично визначуваною шляхом вилучення “зайвих” в’язей. Отримана таким чином система називається основною системою методу сил. Основна система повинна задовольняти певні вимоги, зокрема вона має бути
статично визначуваною;
геометрично незмінюваною;
159
раціональною.
В статично невизначуваних системах розрізняють в’язі абсолютно необхідні та умовно зайві. Абсолютно необхідною є така в’язь, вилучення якої перетворює раму в геометрично змінювану систему. Вилучення абсолютно необхідних в’язей при побудові основної системи методу сил недопустимо. В’язі, вилучення яких не порушує геометричної незмінюваності рами, називаються умовно зайвими.
Слід мати на увазі, що вилучення одного стержня з шарнірами на кінцях еквівалентне вилученню однієї кінематичної в’язі. Врізання одного простого шарніра також еквівалентне вилученню однієї простої в’язі. Додатковий кратний шарнір, яким позначається m простих шарнірів, еквівалентний вилученню m простих в’язей. Наскрізний переріз стержня рами еквівалентний видаленню трьох кінематичних в’язей.
Під еквівалентністю основної і заданої систем потрібно розуміти наступне: в елементах основної системи переміщення і зусилля повинні бути такими ж, як і у заданій.
Виходячи з положень аксіоми про звільнення від в’язей, в основній системі в напрямку вилучених в’язей слід прикласти реактивні зусилля, які разом з активним навантаженням забезпечать однаковість напружено-деформованих станів основної та заданої систем. Зусилля у вилучених в’язях є основними невідомими методу сил.
Для будь-якої статично невизначуваної рами існує багато варіантів основних систем, які відповідають переліченим вимогам. Більш раціональним варіантом основної системи є той, який забезпечує найменшу трудомісткість обчислень, пов’язаних з визначенням невідомих методу сил.
Кількість основних невідомих методу сил дорівнює ступеню статичної невизначуваності розрахункової схеми. В практичних розрахунках перевага надається основним системам, отриманим шляхом постановки шарнірів. Для симетричних статично невизначуваних рам потрібно вибирати симетричну основну систему.
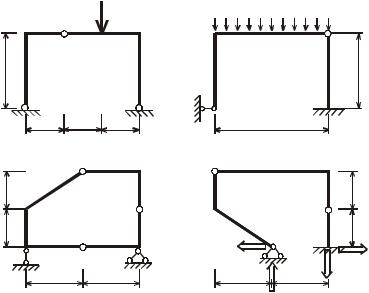
Вибір основної системи методу сил проілюстровано на декілька прикладах. Рама, що зображена на рис.10.4,а тричі статично невизначувана n 3К Ш 3 3 6 3 .
Рис.10.4
160
В’язі в точках А, В і С абсолютно необхідні, і тому їх вилучати не можна. На рис.10.4,б показано варіант основної системи, отриманої шляхом наскрізного перерізу ригеля. Рис.10.4,в ілюструє варіант основної системи, утвореної врізанням трьох простих шарнірів.
Ступінь статичної невизначуваності рами, показаної на рис.10.5,а дорівнюєn 3К Ш 3 2 3 3 . На рис.10.5,б та рис.10.5,в приведені приклади основних систем методу сил для заданої рами.
 а б в
а б в
Рис. 10.5
Для заданої статично невизначуваної рами, зображеної на рис.10.5,а і основної системи методу сил (рис.10.5,б), виходячи з умов їх еквівалентності, обов’язково повинні виконуватись наступні умови:
горизонтальне зміщення точки В основної системи від дії невідомих X1, X2 , X3 і заданого на-
вантаження має співпадати з горизонтальним зміщенням точки В вихідної рами, тобто дорівнювати нулю;
кути повороту осі рами в перерізах А і В для основної системи також повинні дорівнювати нулю, тому що в заданій рамі стержні в цих точках жорстко затиснені.
Використаємо ці умови для визначення переміщень в основній системі в напрямках вилучених в’язей від дії на основну систему невідомих зусиль X1, X2 , X3 та заданого зовнішнього наванта-
ження. В кінцевому вигляді відповідні переміщення можна представити системою
|
11 |
X |
1 |
|
12 |
X |
2 |
X |
3 |
|
|
0; |
|
|||
|
|
|
|
13 |
|
1P |
|
|
||||||||
|
21X1 22 X2 |
23X3 |
2P 0; |
(10.3) |
||||||||||||
|
|
X |
|
|
|
X |
|
|
|
X |
|
|
|
0. |
|
|
|
31 |
1 |
32 |
2 |
33 |
3 |
3P |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|||||||
Система рівнянь (10.3) називається системою канонічних рівнянь методу сил, які по суті є рівняннями сумісності деформацій.
Перше рівняння системи (10.3) визначає суму переміщень в основній системі в напрямку X1
від дії X1 , X 2 , X3 та зовнішнього навантаження (ліва частина), яка прирівнюється до відповідного переміщення в заданій рамі – тобто нулю (права частина). Аналогічний зміст має кожне з рівнянь системи (10.3).