bmp
.pdf252
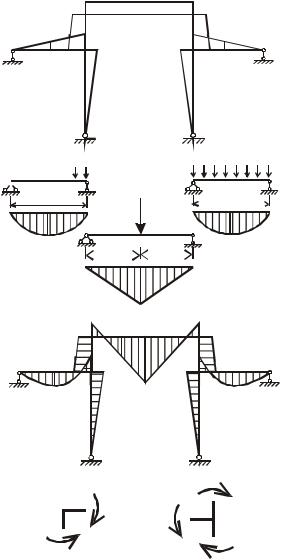
Одиничні епюри згинальних моментів, помножені на величини відповідних основних невідомих, і вантажна епюра MP наведені на рис.13.16.
|
11,3358 |
|
|
|
|
7,5572 |
7,5572 |
1,9082 |
|
1,9082 |
|
22,6716 |
|
|
|
3,8164 |
|
|
2,8623 |
3,8164 |
3,8164 |
2,8623 |
|
3,7786 |
3,7786 |
|
|
|
|
|
M1 Z1 |
|
7,6328 |
7,6328 |
|
|
|
M2Z2 |
|
||
|
|
|
|
|
|
27,1375 |
27,1375 |
|
5 |
5 |
5 |
|
27,1375 |
|
2,5 |
2,5 |
|
|
|
|
|
|
|
18,0917 |
18,0917 |
|
|
|
|
18,0917
M P
Рис.13.16
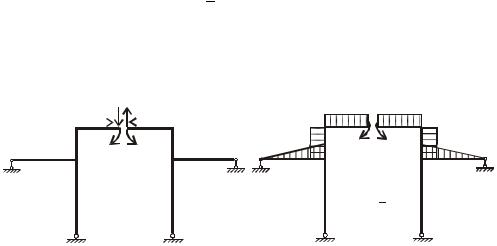
Дійсна епюра згинальних моментів Mд представлена на рис.13.17,а.
|
9,466 |
|
9,466 |
|
||
9,466 |
|
|
|
|
9,466 |
|
0,9355 |
|
8,168 |
10,802 |
8,168 |
|
б |
|
а |
|
|
|
||
|
|
|
|
10,458 |
9,466 |
|
10,458 |
|
|
|
|
6 |
|
2,863 |
7,595 |
|
7,595 |
2,863 |
|
|
|
|
1,908 |
1,908 |
|
|
|
|
|
|
14,275 |
|
|
9,466 |
|
|
|
Mд |
|
||
|
|
|
|
в |
||
|
|
|
|
|
|
|
|
1 |
1 |
1 |
|
1 |
7,595 |
1 |
|
|
|
|
1 |
10,458 |
г |
|
EI=15i |
EI=15i |
3 |
||
|
|
|||||
EI=4i |
x1=1 |
x1=1 |
EI=4i |
|
|
|
|
|
|
||||
|
1 |
|
|
1 |
|
2,863 |
1 |
|
|
|
|
1 |
|
|
|
|
|
|
||
2 |
|
EI=10i |
EI=10i |
|
2 |
|
|
EI=3i |
x2=1 |
x2=1 |
EI=3i |
|
|
|
|
|
|
|
||
|
|
|
Mk |
|
|
|
|
|
|
Рис.13.17 |
|
|
|

253
Статична перевірка
Перевірка полягає в аналізі рівноваги вузлів. Очевидно, що виокремлений зі схеми вузол 6, до якого прикладено згинальні моменти, вибрані з епюри Mд (рис.13.17,б), перебуває в стані рівноваги. Так само зрівноваженим є вузол 3 (рис.13.17,в). Дійсно
M3 10,458 7,595 2,863 0.
Кінематична перевірка
Для виконання кінематичної перевірки вибираємо в заданій рамі основну систему методу сил. Ступінь статичної невизначуваності рами
n 3k ш 3 3 2 7 .
Сім “зайвих” в’язей відкидаємо шляхом введення в схему одного шарніра і двох розрізів. До отриманої в такий спосіб основної системи методу сил прикладаємо дві основні невідомі X1=1 i
X2=1 з таким розрахунком, щоби епюра згинальних моментів Mk розповсюджувалась на всі стержні (рис.13.17,г).
Визначимо жорсткості стержнів на згин за формулою
EI i l .
Отже:
EI6 7 EI7 8 3i 5 15i;
EI3 4 EI4 5 2i 5 10i;
EI1 3 EI2 5 i 3 3i;
EI3 6 EI4 7 EI5 8 i 4 4i.
Жорсткості елементів рами на згин показано на її схемі (рис.13.17,г). Отже за формулою Мора
l
kд MEIk Mд dx 65 152i 9,466 1 4 8,168 1 10,802 1
0
101i 1 5 1,908 2 31i 12 2,863 3 23 2 2 41i 1 4 0,9355 2
3,779i 1,908i 3,817i 1,871i 5,687i 5,688i 0,001i 0 .
254
Побудова епюри поперечних сил
Поперечні сили в стержнях рами визначаємо за епюрой згинальних моментів Mд (рис.13.17,а). Оскільки епюра Mд симетрична, поперечні сили будуть кососиметричними. Отже, обчислювати поперечні сили можна лише для подовжні рами.
Для ділянок, на яких епюра Mд прямолінійна:
Q |
|
2,863 |
0,954 кН; |
||||
|
|
||||||
1 3 |
3 |
|
|
|
|||
Q |
|
9,466 4,595 |
|
4,365 кН; |
|||
|
|||||||
3 6 |
4 |
|
|
||||
Q |
|
10,458 14,275 |
4,947 кН. |
||||
|
|||||||
3 4 |
5 |
|
|
||||
|
|
|
|||||
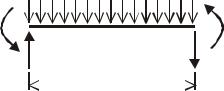
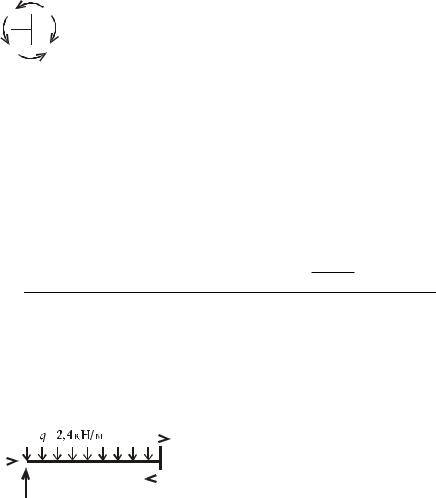
Для ділянки, на якій епюра Mд криволінійна, поперечні сили визначаємо з аналізу рівноваги стержня. Так, стержень 6-7 виокремлюємо зі схеми і прикладаємо до нього зовнішнє рівномірно розподілене навантаження q = 2,4 кН/м. В місцях розрізів прикладаємо згинальні моменти, які беруться з епюри Mд, а також додатньо спрямовані кінцеві поперечні сили (рис.13.18).
|
|
q = 2,4 кН/м |
|
9,466 кНм 6 |
|
10,802 кНм |
|
7 |
|||
|
Q 6-7 |
Q 7-6 |
|
|
|
5 м |
|
|
|
|
|
Рис.13.18
З рівнянь рівноваги стержня 6-7 маємо:
M 7 |
0 |
|
Q6 7 |
5 2,4 5 2,5 9,466 |
10,802 0 |
Q6 7 |
10,053кН; |
|
0 |
|
|
5 2,4 5 2,5 9,466 |
10,802 0 |
Q7 6 |
1,947 кН. |
M 6 |
Q7 6 |
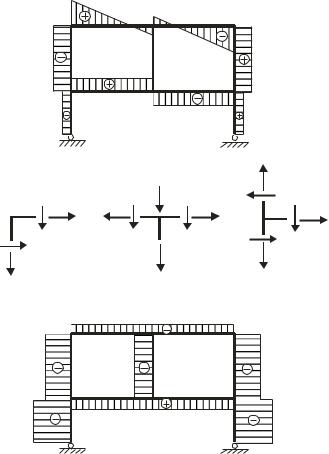
Дійсна епюра поперечних сил Qд побудована на рис.13.19,а.
255
|
|
|
10,053 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1,947 |
|
|
|
|
4,265 |
|
|
|
|
|
|
4,265 |
||
|
|
|
|
1,947 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
10,053 |
|
|
|
|
|
4,947 |
|
|
4,947 |
|
|
|
|
|
4,265 |
|
|
|
|
|
4,265 |
|||
|
|
|
|
|
|
|
||||
|
|
0,954 |
|
|
|
|
|
0,954 |
|
|
|
|
|
|
|
|
4,947 |
4,947 |
|
|
|
|
|
0,954 |
|
|
а |
|
|
0,954 |
|
|
|
|
|
|
|
|
|
|
Q д |
|
|
б |
|
|
|
|
в |
|
P=6 |
4,265 |
N 3-6 г |
|
6 |
|
N 6-7 |
N |
7-6 |
7 |
|
N 7-8 |
|
N 3-4 |
|
|
|
|
|
|
3 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
10,053 |
|
|
1,947 |
|
1,947 |
|
4,947 |
|
|
|
|
|
|
|
|
|
|||
|
|
4,265 |
|
|
|
|
|
|
0,954 |
|
|
N |
6-3 |
|
|
|
|
N 7-4 |
N |
3-1 |
|
|
|
|
|
|
|
|
|
|
||
|
|
д |
4,265 |
|
|
|
|
4,265 |
|
|
10,053 |
|
9,894 |
|
|
10,053 |
|||||
|
|
|
|
|
|
|||||
|
10,053 |
|
9,894 |
|
|
10,053 |
||||
15,000 |
|
|
|
|
|
|||||
3,311 |
|
|
|
|
3,311 |
15,000 |
||||
|
|
|
|
|
|
|
|
|
||
15,000 |
|
|
|
|
|
N д |
|
15,000 |
||
|
|
|
|
|
|
|
|
|
|
|
Рис.13.19
Визначення поздовжніх сил
Поздовжні сили в стержнях рами визначаються з умов рівноваги вузлів рами. З умов рівноваги вузла 6 (рис.13.19.б) можна записати:
Fx 0 |
|
N6 7 4,265 0 |
N6 7 4,265 кН; |
||||
|
|
|
|
|
|
|
|
Fy 0 |
|
N6 3 |
10,053 0 |
|
N6 3 10,053кН. |
||
З умов рівноваги вузла 7 (рис.13.19.в): |
|
|
|
||||
Fx 0 |
|
N7 6 |
N7 8 0 |
N7 6 |
4,265 кН; |
||
|
|
|
|
|
|
|
|
Fy 0 |
|
N7 4 |
1,947 1,947 6 0 |
|
N7 4 9,894 кН. |
||
Для вузла 3 (рис.13.17.г): |
|
|
|
|
|||
Fx 0 |
|
N3 4 0,954 4,265 0 |
|
N3 4 |
3,311кН; |
||
|
|
|
|
|
|
|
|
Fy 0 |
|
N3 1 |
N3 6 4,947 0 |
N3 1 15,000 кН. |
|||
Епюра поздовжніх сил Nд побудована на рис.13.19,д.

256
13.5. Розрахунок симетричної рами в розгорнутій формі
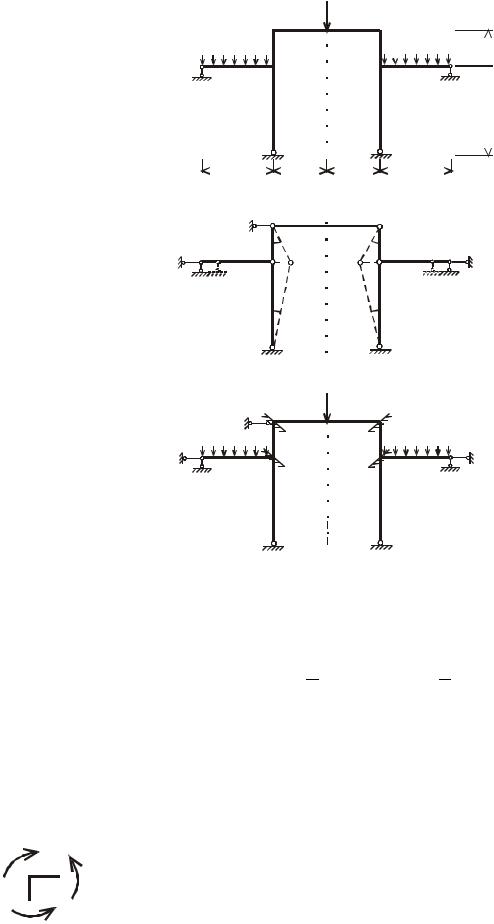
Виконаємо розрахунок статично невизначуваної рами на симетричне навантаження методом переміщень в розгорнутій формі (рис.13.20,а). Погонні жорсткості стержнів:
i |
3EI |
i; |
3 4 |
6 |
|
|
|
|
i |
2EI |
0,8i; |
1 4 |
5 |
|
|
|
|
i |
EI |
i; |
4 7 |
2 |
|
|
|
|
i |
3EI |
i. |
6 8 |
6 |
|
|
|
Визначення кількості основних невідомих і призначення основної системи
Рама має чотири проміжних жорстких вузли, отже
k 4 4 , 5, 7 , 8 .
Для визначення кількості незалежних поступальних переміщень вузлів утворюємо шарнірну схему рами шляхом введення в усі жорсткі вузли наскрізних шарнірів (рис.13.20,б). Очевидно, що для забезпечення геометричної незмінюваності шарнірної схеми достатньо ввести три додаткові опорні стержні С1, С2 і С3. Це означає, що k = 3. Очевидно, що стержень С1 усуває лише горизонтальне переміщення ригеля 3-4, стержень С2 лише горизонтальне переміщення ригеля 5-
6, а стержень С3 горизонтальне переміщення ригеля 7-8. Таким чином кількість основних невідомих
k = k + k = 7.
Основна система, утворена введенням “плаваючих” затиснень в проміжні жорсткі вузли, а також додаткових стержнів С1, С2 і С3, представлена на рис.13.20,в.
Урахування симетрії дозволяє скоротити кількість основних невідомих. Дійсно, оскільки рама і навантаження симетричні, то й симетричними будуть деформації рами. На цій підставі можна вважати, що
8 7 ;5 4.
До того ж поступальне переміщення ригеля 7-8 дорівнюватиме нулю, а поступальні переміщення ригелів 3-4 і 5-6 будуть симетричними і залежатимуть від параметра
(див.рис.13.20,б):
1 2 .
Таким чином кількість невідомих скорочується до трьох: 4 , 7 і .

258
У свою чергу, кінцеві моменти виражаються через переміщення вузлів за допомогою формул методу переміщень для зігнутих стержнів, які наведено в табл.13.2. Оскільки стержні 7-8 і 7-4 мають на обох кінцях затиснення, скористаємось з формул першого рядка табл.13.2:
M7 8 2i7 8 2 7 8 3 7 8 M7 8
|
|
|
|
|
|
|
|
|
6 6 |
|
|
|
|
|
|
2i 2 7 |
7 |
0 |
|
|
2i 7 4,5; |
||||||||||
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
M7 4 2i4 7 2 7 4 3 4 7 M7 4 |
|
||||||||||||||
|
2 |
|
|
|
|
|
|
0 4i |
|
2i |
|
3i . |
|||
2i |
7 |
4 |
3 |
|
7 |
4 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
M7 6i 7 2i 4 3i 4,5 0 .
Реактивний момент пружного затиснення вузла 4 виражається через кінцеві моменти в стержнях з умови рівноваги вузла 4.
M 4-7 |
4 |
M 0 |
M 4 M 4 7 M4 1 M 4 3 0. |
|
4 M |
||||
|
|
M4-3
M 4-1 Кінцевий момент M4-7 виражаємо через основні невідомі, використовуючи формулу з першого рядка, а кінцеві моменти M4-1 i M4-3 з другого рядка табл.13.2.
M4 7 2i4 7 2 4 7 3 4 7 M 4 7 |
|
|
|
|
|
|
||||||||||||||
|
2 |
|
|
|
|
|
|
|
0 4i |
|
2i |
|
3i ; |
|
|
|
|
|
||
2i |
4 |
7 |
3 |
|
4 |
7 |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
M4 1 |
3i4 1 |
4 |
|
4 1 |
|
|
|
|
|
4 |
|
|
0 |
1,2i 4 |
0,24i ; |
|||||
M4 1 3 0,4i |
5 |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M4 3 3i4 3 4 4 3 M4 3 3i 4 0 2,48 42 3i 4 4,8.
M4 2i 7 8,2i 4 2,76i 4,8 0 .
Для аналізу реакції в накладеному стержні С1 розглядаємо рівновагу ригеля 3-4, який утримується зазначеним стержнем від поступального переміщення.
|
|
|
Q4-7 |
Fx 0 |
R3 Q4 1 Q4 7 0 . |
|
|
||||||||
3 |
|
|
|
4 |
Для стержня |
4-1, що |
має на |
одному кінці |
затиснення, |
а на |
|||||
|
|
|
|||||||||||||
R3 |
|
||||||||||||||
|
|
|
|
|
|
протилежному |
шарнір, |
кінцеву |
поперечну силу |
виражаємо |
через |
||||
V3 |
Q 4-1 |
||||||||||||||
|
|
||||||||||||||
основні невідомі за формулою з другого, а для затисненого на обох кінцях стержня 4-7 з першого рядка табл.13.2.

259
|
|
|
3i |
4 1 |
|
|
|
|
|
Q |
|
|
3 0,4i |
|
|
|
|
|
0 |
0,24i |
|
0,048i ; |
|||||||||
Q |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
l4 1 |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
4 1 |
|
|
|
|
|
|
|
4 |
|
1 4 |
|
4 |
1 |
|
|
5 |
|
|
4 |
|
5 |
|
|
|
4 |
|
|||||
Q4 7 |
|
6i4 7 |
4 7 2 4 7 Q4 7 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
l4 7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
6i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
4 |
|
7 |
|
2 |
|
|
0 3i |
4 |
3i |
7 |
3i . |
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
R3 3i 7 2,76i 4 3,048i 0 .
У результаті маємо систему трьох рівнянь:
6 7 |
2i 4 |
3i |
4,5 0 ; |
2i 7 |
8,2i 4 |
2,76i |
4,8 0 ; |
3i 7 |
2,76i 4 |
3,048i 0. |
|
Розв’язавши систему рівнянь отримаємо:
7 1,3177i ; 4 0,6764i ; 0,6845i .
Для перевірки правильності розв’язання підставимо розв’язки до сумарного рівняння:
11i 7 12,96i 4 5,808i 0,3
11 1,3177 12,96 0,6764 8,808 0,6845 0,3 14,7947 14,7952 0 .
Обчислення кінцевих моментів
Підставляючи отримані розв’язки до формул методу переміщень обчислюємо кінцеві моменти:
M7 8 2i 7 4,5 2 1,3177 4,5 1,865кНм;
M7 4 4i 7 2i 4 3i 4 1,3177 2 0,6764 3 0,6845 1,865кНм;
M4 7 4i 4 2i 7 3i 4 0,6764 2 1,3177 3 0,6845 2,124кНм;
M4 3 3i 4 4,8 3 0,6764 4,8 2,771кНм;
M4 1 1,2i 4 0,24i 1,2 0,6764 0,24 0,6845 0,647кНм.
При симетричному навантаженні епюра згинальних моментів буде симетричною. Тому можна обмежитись обчисленням кінцевих моментів лише для половини рами.
Відкладавши кінцеві моменти з урахуванням знаків (додатний момент обертає вузол проти годинникової стрілки) на схемі рами і з’єднавши ординати прямими відрізками отримаємо епюру вузлових моментів Mвузл (рис.13.21,а).