

bmp
.pdf282
Рис.14.18
Вантажні реакції в локальній системі координат:
p |
qxl |
|
0; |
|
|
|
|
p |
qxl |
|
0; |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
1 |
|
2 |
|
|
|
|
|
|
|
4 |
|
|
2 |
|
|
|
|
|
|
|
|
|
p |
|
q yl |
|
|
2,4 3 |
3,6; |
p |
|
|
q yl |
|
2,4 3 |
3,6; |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
2 |
|
2 |
|
|
|
2 |
|
|
5 |
|
|
2 |
|
|
|
|
2 |
|
|
|
||
p |
q yl2 |
|
2,4 32 |
1,8; |
p |
|
q yl |
2 |
|
2,4 32 |
1,8. |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
3 |
12 |
|
|
|
12 |
|
|
6 |
|
|
12 |
|
|
|
12 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Вантажні реакції у глобальній системі координат можна визначити по формулам (14.15) або шляхом порівняння реакцій у локальній та глобальній системах координат. Так, з порівняння вантажних реакцій в локальній (рис.14.18,б) і в глобальній (рис.14.18,в) системах координат доходимо висновку:
p1 p2 3,6; |
p4 |
p5 3,6; |
p2 p1 0; |
p5 p4 0; |
|
p3 p3 1,8; |
p6 |
p6 1,8. |
Вантажні реакції, орієнтовані по осях глобальної системи координат, з урахуванням знаків показано на рис.14.18,г:
Стержень 1-4 (рис.14.19,а). Скінченний елемент має жорсткий вузол на початку і шарнірний на кінці і тому відноситься до другого типу. Навантаження в локальній системі координат:
qx 0; |
q y 2,4. |



285
Порівнюючи сили на рис.14.17 і на рис.14.21, можемо записати:
Q1 3,6 4,5 8,1;
Q3 2,7 1,8 0,9;
Q10 2,7;
Q13 6;
Q14 4;
Q16 6;
Q17 4.
Усі інші елементи вектора Q дорівнюють нулю. Таким чином
Q 8,1 0 0,9 0 0 0 0 0 0 2,7 0 0 |
6 4 0 |
6 |
4 T . |
Додаючи вектори F і Q одержуємо, згідно з формулою (14.3), вектор вузлових навантажень дискретної моделі:
F 8,1 0 0,9 0 |
10 0 0 0 0 2,7 |
0 0 6 4 0 |
6 |
4 T . |
Матриця жорсткості дискретної моделі
Дискретна модель рами, що розраховується, має 17 ступенів вільності. Тому матриця жорсткості дискретної моделі є квадратною матрицею17x17:
K |
K1,1 |
K1,2 |
|
K1,17 |
|
. |
|
|
K2,1 |
K2,2 |
|
K2,17 |
|
||
|
|
|
|
|
|
|
|
|
|
|
K17,2 |
|
K17,17 |
|
|
|
K17,1 |
|
|
||||
Елементи матриці – це величини вузлових реакцій, що зумовлюються одиничними вузловими переміщеннями. Для обчислення коефіцієнтів матриці жорсткості необхідно почергово надавати одиничні переміщення вузлам дискретної моделі і знаходити сили, які при цьому передаватимуться на вузли.
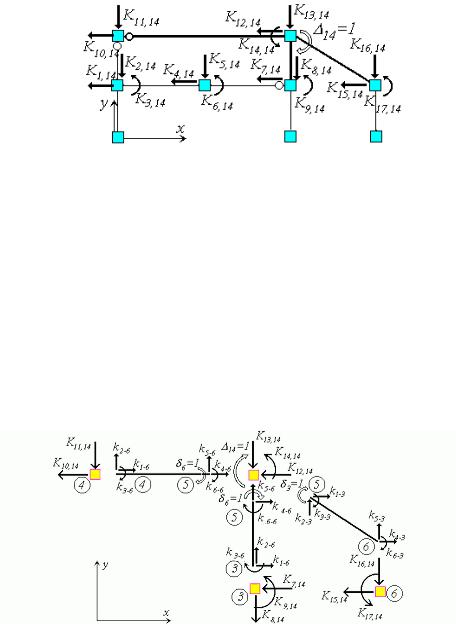
Обчислимо, наприклад, елементи 14 стовпця матриці жорсткості. З цією метою надамо дис-
кретній моделі примусове вузлове переміщення 14 1, вважаючи, що всі інші переміщення вузлів дорівнюють нулю. Тобто надамо вузлу 5 примусовий одиничний поворот, вважаючи, що всі інші вузли не переміщуються. На вузли дискретної моделі з боку стержнів передаватимуться кінцеві реакції, зумовлені деформаціями стержнів (рис.14.22).
286
Рис.14.22
Унаслідок переміщення вузла 5 деформуються стержні 4-5, 5-6, 3-5, які до нього приєднуються. Вони виділені на рисунку товстими лініями. Тільки в цих стержнях виникають напруження і кінцеві реакції, що передаються на вузли дискретної моделі і зумовлюють появу вузлових реакцій. Тому можна відразу зазначити: якщо до вузла приєднуються тільки недеформовані стержні, то вузлових реакцій в даному вузлі не виникає. На цій підставі можна вважати, що K1,14 K2,14 K3,14 K4,14 K5,14 K6,14 0. Для обчислення реакцій, які діють на вузли з боку де-
формованих стержнів розглянемо окремо відповідний фрагмент у збільшеному масштабі
(рис.14.23).
Рис.14.23
Разом із поворотом 14 1 вузла 5 повертаються кінці стержнів 4-5, 3-5 і 5-6. Але якщо для стержня 5-6 це поворот його початку і тому на схемі він позначений 3 1, то для стержнів 4-5 і 3- 5 – це повороти кінців, тобто 6 1. Тому на стержні 5-6 кінцеві реакції другим мають індекс 3
( k1,3 , k2,3 , k3,3 , k4,3 , k5,3 , k6,3 ), а на стержнях 4-5 і 3-5 – індекс 6 (k16 , k26 , k36 , k46 , k56 , k66 ). Вели-
чини кінцевих реакцій визначаються матрицями жорсткості скінченних елементів відповідних типів. Так, стержні 3-5 і 5-6 є елементами першого, а стержень 4-5 – елементом другого типу. Дані для обчислень вибираємо з табл.14.4.


288
Вузол 4: |
10 |
12,923; |
11 -0,1815; |
|
|
|
Вузол 5: |
12 |
12,707; |
13 |
-1,2679; |
14 |
0,5571; |
Вузол 6: |
15 |
13,063; |
16 |
-0,4094; |
17 |
0,4117. |
Обчислення внутрішніх зусиль
Визначення вузлових переміщень дискретної моделі дає змогу обчислити сумарні кінцеві реакції в кожному скінченному елементі. Обчислимо, наприклад, сумарні кінцеві реакції в стержні 5-
6 (рис.14.14).
Побудуємо вектор кінцевих переміщень у глобальній системі координат для стержня 5-6:
|
1 |
|
|
12 |
|
|
12,707 |
|
||
|
|
2 |
|
|
|
|
|
1,2679 |
|
|
|
|
|
|
|
13 |
|
|
|
|
|
3 |
|
14 |
|
|
0,5571 |
|
||||
5 6 |
|
|
|
|
|
|
|
|
13,063 |
. |
|
|
4 |
|
|
|
|
|
|||
|
|
15 |
|
|||||||
|
|
|
|
|
|
|
|
|
0,4094 |
|
|
|
|
5 |
|
|
16 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0,4117 |
|
|
|
6 |
5 6 |
|
|
|||||
|
|
17 |
|
|||||||
Скомпонуємо вектор вантажних реакцій стержня 5-6 у локальній системі координат:
|
|
1 |
|
|
3,60 |
|
|
|
p |
|
|
||
|
p |
|
4,80 |
|||
|
|
2 |
|
|
|
|
p 3 |
4,00 |
|||||
p5 6 |
p |
|
3,60 . |
|||
|
|
4 |
|
|
|
|
|
p |
|
4,80 |
|||
|
|
5 |
|
|
4,00 |
|
|
p |
|
|
|||
|
|
6 |
5 6 |
|
||
Складемо матрицю h5 6 , на підставі співвідношень (14.25), як для стержня з першим типом граничних умов. При обчисленнях дані вибираємо з таблиці фізико-геометричних характеристик скінченних елементів (Табл.14.1). В результаті маємо:
|
|
32 |
24 |
0 |
32 |
24 |
0 |
|
|
|
|
|
0,48 |
0,1152 |
0,1536 |
|
|
|
|
0,1152 |
0,1536 |
0,48 |
||||
|
|
0,288 |
0,384 |
1,6 |
0,288 |
0,384 |
0,8 |
|
h5 6 |
|
|
|
|
|
|
|
. |
32 |
24 |
0 |
32 |
24 |
|
|||
|
|
0 |
||||||
|
0,1152 |
0,1536 |
0,48 |
0,1152 |
0,1536 |
0,48 |
||
|
|
0,288 |
0,384 |
0,8 |
0,288 |
0,384 |
|
|
|
|
1,6 |
||||||
|
|
|
|
|
|
|
|
|
Виконуємо обчислення за формулою (14.24):

289
|
s |
1 |
|
|
|
|
||
|
|
s |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
2 |
|
|
|
|
|
|
s |
3 |
h |
|
|||||
s5 6 |
|
s |
|
|
5 6 5 6 |
p5 6 |
||
|
|
|
|
|
|
|
||
|
|
4 |
|
|
|
|
|
|
|
s |
|
|
|
|
|
||
|
|
|
5 |
|
|
|
|
|
|
s |
|
|
|
|
|
||
|
|
|
6 |
5 6 |
|
|
|
|
|
32 |
24 |
0 |
32 |
24 |
0 |
12,707 |
|
|
3,60 |
|
5,615 |
||||
|
|
|
0,48 |
0,1152 |
0,1536 |
|
|
|
1,2679 |
|
|
|
|
|
|
|
|
0,1152 |
0,1536 |
0,48 |
|
|
|
4,80 |
|
4,162 |
|||||||
|
0,288 |
0,384 |
1,6 |
0,288 |
0,384 |
0,8 |
0,5571 |
|
4,00 |
|
2,347 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
. |
32 |
24 |
0 |
32 |
24 |
|
13,063 |
|
|
||||||||
|
0 |
|
|
|
3,60 |
12,815 |
||||||||||
0,1152 |
0,1536 |
0,48 |
0,1152 |
0,1536 |
0,48 |
0,4094 |
|
4,80 |
|
5,438 |
||||||
|
0,288 |
0,384 |
0,8 |
0,288 |
0,384 |
|
|
|
0,4117 |
|
|
|
|
|
|
|
|
1,6 |
|
|
|
4,00 |
|
5,536 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Знайдені сумарні кінцеві реакції прикладаються до скінченного елемента (рис.14.24).
Рис.14.24
Обчислимо внутрішні зусилля в довільному перерізі стержня:
M x лів M x 4,162 x 2,347 3 2x2 ;
Qx y 4,162 3 x cos ;
лів
Nx x 5,165 3 x sin .
|
|
|
|
|
лів |
||||
Зауважимо, що sin |
|
sin |
|
, |
cos |
|
cos |
|
. |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Таким чином, на початку стержня (x x 0 )
Mп 2,347; |
Qп 4,162; |
Nп 5,165. |
В середині стержня (x 2,5; x 2 )

290
Mc 4,162 2,5 2,347 3 22 2,058; 2
Qc 4,162 3 2 0,8 0,638; Nc 5,165 3 2 0,6 8,765.
На кінці стержня (x 5; x 4 )
M к 5, 536; |
Qк 5, 438; |
Nк 12,815. |
Аналогічні обчислення виконуються для всіх інших стержнів. Результати розрахунків запишемо до табл.14.2.
Таблиця 14.2
СЕ |
Mп |
Mс |
Mк |
Qп |
Qк |
Nп |
Nк |
|
1- |
2 |
-9.047 |
3.215 |
15.477 |
6.131 |
6.131 |
-4.853 |
-4.853 |
2- |
3 |
15.477 |
7.738 |
0.000 |
-3.869 |
-3.869 |
-4.853 |
-4.853 |
3- |
6 |
3.817 |
0.597 |
-2.623 |
-1.610 |
-1.610 |
1.456 |
1.456 |
4- |
5 |
0.000 |
-0.158 |
-0.316 |
-0.039 |
-0.039 |
-5.400 |
-5.400 |
5- |
6 |
-2.347 |
2.058 |
-5.536 |
4.162 |
-5.438 |
-5.613 |
-14.813 |
1- |
7 |
3.646 |
1.766 |
5.286 |
-3.053 |
4.147 |
-6.091 |
-6.091 |
1- |
4 |
5.400 |
5.400 |
0.000 |
1.800 |
-5.400 |
0.039 |
0.039 |
3- |
5 |
2.731 |
0.350 |
-2.031 |
-1.587 |
-1.587 |
-20.002 |
-20.002 |
3- |
8 |
-6.548 |
0.535 |
7.619 |
4.722 |
4.722 |
-22.261 |
-22.261 |
6- |
9 |
-8.160 |
0.137 |
8.434 |
5.531 |
5.531 |
-14.648 |
-14.648 |
|
|
|
|
|
|
|
|
|
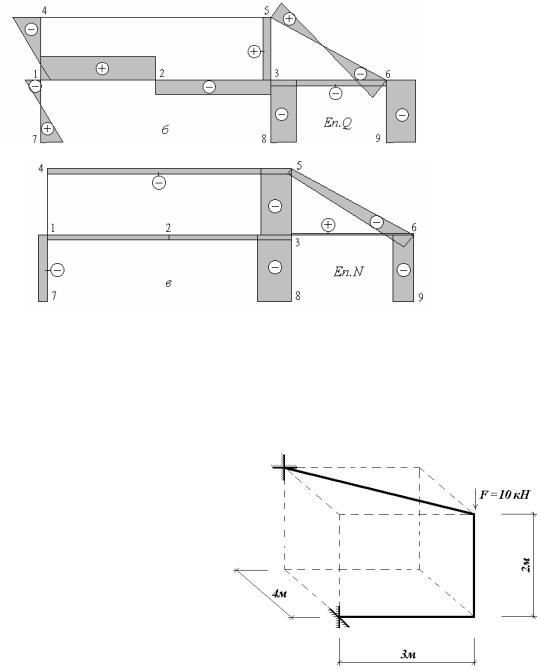
За результатами табл.14.2 на рис.14.25 побудовано епюри внутрішніх зусиль.
291
Рис.14.25
14.3. Приклад розв’язування просторової рами методом скінченних елементів
Дано: розрахункова модель просторової рами (рис.14.26), всі стержні якої мають жорсткістні параметри: ЕА 300 , EI y EIz GIкр 3.
Необхідно: Визначити внутрішні зусилля в стержнях рами.
Розв’язуватимемо задачу в глобальній сис- |
|
темі координат OXYZ (рис.14.27). Просторову |
|
раму розглядатимемо як сукупність трьох стер- |
|
жневих скінченних елементів 1-2, 2-3, 3-4, по- |
|
єднаних між собою у вузлах 2, 3 і з диском „зе- |
|
мля” жорсткими в’язями 1 та 4. З кожним скін- |
|
ченним елементом пов’яжемо локальні системи |
Рис.14.26 |
|
|
координат xi j yi j zi j . |
|
Вузли рами мають дванадцять можливих переміщень (рис.14.28)
1 2 ... 12 Т .