

bmp
.pdf
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
222 |
||
|
|
0,75 |
|
-0,370 |
|
-0,839 |
|
0,75 |
|
-0,278 |
|
-0,210 |
|
0,262 |
|
||||
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
1 |
|
0 |
|
|
0 |
|
0 |
|
|
0,000 |
|
0,000 |
|
0,000 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
0 |
|
0 |
|
|
0 |
|
0 |
|
|
0,000 |
|
0,000 |
|
0,000 |
|
||
|
|
0,25 |
|
0,131 |
|
-0,701 |
|
0 |
|
|
0,098 |
|
-0,175 |
|
-0,077 |
|
|||
|
l3 |
0,50 |
|
0,117 |
|
-0,623 |
|
0 |
|
|
0,088 |
|
-0,156 |
|
-0,068 |
|
|||
|
0,75 |
|
0,044 |
|
-0,234 |
|
0 |
|
|
0,033 |
|
-0,059 |
|
-0,025 |
|
||||
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
1 |
|
0 |
|
|
0 |
|
0 |
|
|
0,000 |
|
0,000 |
|
0,000 |
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Обчислимо згинальний момент в перерізі від постійного навантаження |
|
q 1,2 кН м по всій |
|||||||||||||||||
балці (рис.12.8,а). Площу лінії впливу будемо обчислювати по формулі трапецій (12.20). |
|||||||||||||||||||
|
|
Mk |
|
|
|
|
1 |
0,452 |
2 |
8 |
0 |
0,424 0,678 0,593 0 |
|
||||||
|
|
qAMk 1,2 |
2 |
4 |
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
124 |
0 1,642 0,769 0,262 0 94 0 0,077 0,068 0,025 0) |
||||||||||||||||
4,699 кН м.
м.
Зрозрахунку на постійне навантаження (рис.12.8,г.) у перерізі k згинальний момент дорівнює Mk 4,894 кН м, що практично, збігається з одержаним результатом.
м, що практично, збігається з одержаним результатом.
3.Лінія впливу поперечної сили в перерізі k (рис.12.18,а)
Рис.12.18
Лінії впливу поперечної сили будуються на базі співвідношення (12.7), де Mi 1 та Mi – лінії впливу опорних моментів на лівій та правій опорах прогону, а QPz – лінія впливу поперечної сили в перерізі однопрогонової балки (рис.12.18,в). Для даного перерізу
лв. .Qk |
|
1 |
M2 M1 Qpk |
|
1 |
лв. .M2 |
1 |
лв. .M1 лв. .Qбk . |
|
|
l |
|
|
12 |
|
12 |
|
|
|
1 |
|
|
|
|
|
|

223
Обчислення ординат лінії впливу поперечної сили Qk виконуємо в табл.12.9.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 12.9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
l |
|
ξ |
M1 |
|
|
|
M2 |
|
|
|
|
|
|
1 |
M1 |
|
1 M2 |
|
|
Qбk |
|
Qk |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
12 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
l0 |
|
0 |
0,654 |
|
-0,154 |
|
|
|
|
|
-0,154 |
|
-0,013 |
|
|
0 |
|
-0,067 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
l1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
0,25 |
-0,613 |
|
0,144 |
|
|
|
|
|
0,051 |
|
0,012 |
|
|
0 |
|
0,063 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0,50 |
-0,981 |
|
0,231 |
|
|
|
|
|
0,082 |
|
0,019 |
|
|
0 |
|
0,111 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0,75 |
-0,858 |
|
0,202 |
|
|
|
|
|
0,071 |
|
0,017 |
|
|
0 |
|
0,088 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
l2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
0,25 |
-0,642 |
|
-0,510 |
|
|
|
|
|
0,053 |
|
-0,042 |
|
|
0,25 0,75 |
|
0,239 0,761 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0,50 |
-0,675 |
|
-0,900 |
|
|
|
|
|
0,056 |
|
-0,075 |
|
|
0,50 |
|
0,481 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0,75 |
-0,370 |
|
-0,839 |
|
|
|
|
|
0,031 |
|
-0,070 |
|
|
0,25 |
|
0,211 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
l3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
0,25 |
0,131 |
|
-0,701 |
|
|
|
|
|
-0,011 |
|
-0,058 |
|
|
0 |
|
-0,069 |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0,50 |
0,117 |
|
-0,623 |
|
|
|
|
|
-0,010 |
|
-0,052 |
|
|
0 |
|
-0,063 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
0,75 |
0,044 |
|
-0,234 |
|
|
|
|
|
-0,004 |
|
-0,019 |
|
|
0 |
|
-0,023 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
0 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
Дійсна лінія впливу показана на рис.12.18,г. |
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
Для перевірки завантажуємо лінію впливу постійним навантаженням g 1,2 кН м (рис.12.6). |
|||||||||||||||||||||||||||
Криволінійні площі лінії впливу в прогонах l1 |
та l3 будемо обчислювати за формулою парабол |
|||||||||||||||||||||||||||
(12.21), а в прогоні l2 |
– за формулою трапецій (12.20). |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
Qk |
|
|
|
|
1 |
0,067 2 |
|
|
8 |
|
0 4 0,063 2 0,111 4 0,088 0 |
||||||||||||||
|
|
|
1,2 |
2 |
3 4 |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
3 |
|
0 0,239 |
9 |
|
1 |
|
|
|
|
|
|
|
|
|
9 |
0 4 0,069 |
|
|||||||
|
|
|
2 |
3 |
|
2 |
0,761 0,481 0,211 0 |
3 4 |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
2 0,063 4 0,023 0 |
|
3,567 |
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
кН. |
|
|
|
|
|
|
|||||||||||||||||
Це, практично, збігається з результатом, одержаним при розрахунку за допомогою рівнянь трьох моментів.

224
4.Лінія впливу опорної реакції R1 (рис.12.19,а)
Рис.12.19
Лінії впливу опорної реакції Ri будуються на базі співвідношення (12.10), де Qi 1 та Qi – лінії впливу поперечних сил відповідно з правого та лівого боку від опори і. Зокрема, для опори 1 можна записати
лв. .R1 лв. .Qпр,1 лв. .Qлів,1 .
Поперечні сили праворуч та ліворуч опори визначаються залежностями
Q |
|
M2 M1 Qб |
лв. .Q |
|
|
лв. .M2 лв. .M1 лв. .Qб |
, |
|
||
пр,1 |
|
пр,1 |
пр,1 |
|
|
12 |
пр,1 |
|
|
|
|
|
l2 |
|
|
|
|
|
|
|
|
Q |
|
M1 M0 Qб |
лв. .Q |
лів,1 |
|
лв. .M1 лв. .M0 лв. .Qб |
|
. |
||
лів,1 |
|
лів,1 |
|
|
8 |
лів,1 |
|
|||
|
|
l1 |
|
|
|
|
|
|
|
|
Обчислення ординат лінії впливу поперечної сили Qk виконуємо в табл.12.9.
|
|
|
|
|
|
|
|
Таблиця 12.10 |
|
|
|
|
|
|
|
|
|
|
|
l |
ξ |
M0 |
M1 |
M2 |
M2 M1 |
M1 M0 |
Qб |
Qб |
R1 |
|
|
|
|
|
12 |
8 |
пр,1 |
лів,1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
l |
0 |
-2 |
0,654 |
-0,154 |
-0,067 |
-0,332 |
0 |
0 |
0,399 |
|
|
|
|
|
|
|
|
|
|
0 |
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
l1 |
|
|
|
|
|
|
|
|
|
0,25 |
0 |
-0,613 |
0,144 |
0,063 |
0,077 |
0 |
0,25 |
0,390 |
|
|
0,50 |
0 |
-0,981 |
0,231 |
0,101 |
0,123 |
0 |
0,5 |
0,724 |
|
|
|
|
|
|
|
|
|
|
|
0,75 |
0 |
-0,858 |
0,202 |
0,088 |
0,107 |
0 |
0,75 |
0,945 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
1 |
1 |
|
|
|
|
|
|
|
|
|
|

|
|
|
|
|
|
|
|
|
225 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
1 |
0 |
1 |
l2 |
|
|
|
|
|
|
|
|
|
0,25 |
0 |
-0,642 |
-0,510 |
-0,011 |
0,080 |
0,75 |
0 |
0,841 |
|
|
|
|
|
|
|
|
|
|
|
|
0,50 |
0 |
-0,675 |
-0,900 |
-0,019 |
0,084 |
0,5 |
0 |
0,565 |
|
|
|
|
|
|
|
|
|
|
|
0,75 |
0 |
-0,370 |
-0,839 |
-0,039 |
0,046 |
0,25 |
0 |
0,257 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
l3 |
|
|
|
|
|
|
|
|
|
0,25 |
0 |
0,131 |
-0,701 |
-0,069 |
-0,116 |
0 |
0 |
-0,085 |
|
|
0,50 |
0 |
0,117 |
-0,623 |
-0,062 |
-0,015 |
0 |
0 |
-0,077 |
|
|
|
|
|
|
|
|
|
|
|
0,75 |
0 |
0,044 |
-0,234 |
-0,023 |
-0,005 |
0 |
0 |
-0,018 |
|
|
|
|
|
|
|
|
|
|
|
1 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
0 |
Для перевірки завантажуємо побудовану лінію впливу постійним навантаженням g 1,2 кН м
м
(рис.12.6). Криволінійні площі лінії впливу на кожному прогоні будемо обчислювати за формулою параболи (12.21).
|
|
|
|
|
1 |
0,389 |
2 |
8 |
0 |
4 0,390 2 |
0,724 4 0,945 1 |
|
R1 1,2 |
2 |
3 |
4 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|||
|
12 |
1 |
4 0,841 2 |
0,565 4 0,257 0 |
|
|||||||
3 |
4 |
|
||||||||||
|
9 |
0 |
4 |
|
|
|
|
|
|
|
13,045 кН. |
|
|
4 |
0,085 2 0,077 4 0,028 0 |
||||||||||
|
3 |
|
|
|
|
|
|
|
|
|
|
|
Результати практично збігаються.
12.5. Задачі для самостійного опрацювання
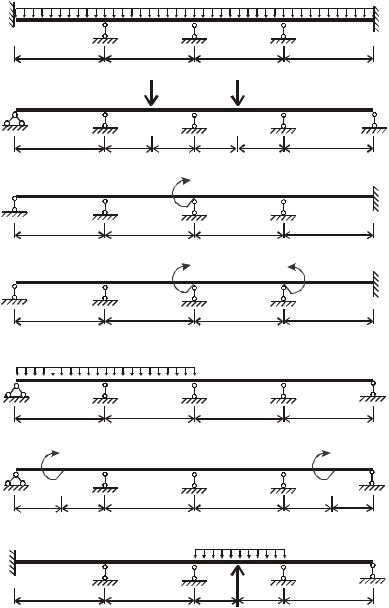
Побудувати епюри зусиль в нерозрізних балках, представлених на рис.12.20.
226
1 |
|
g = 3 кН/м |
|
|
|
|
|
|
|
|
|
||
EI |
|
EI |
|
EI |
|
EI |
6 |
|
6 |
|
6 |
|
6 |
2 |
P=12 кН |
|
P=12 кН |
|
|
|
EI |
|
EI |
|
EI |
|
EI |
6 |
3 |
3 |
3 |
3 |
|
6 |
3 |
|
|
M = 12 кНм |
|
|
|
EI |
|
EI |
|
EI |
|
EI |
6 |
|
6 |
|
6 |
|
6 |
4 |
M = 12 кНм |
|
|
M = 12 кНм |
||
EI |
|
2EI |
|
EI |
|
2EI |
6 |
|
6 |
|
6 |
|
6 |
5 |
g = 3 кН/м |
|
|
|
|
|
EI |
|
2EI |
|
2EI |
|
EI |
6 |
|
8 |
|
8 |
|
6 |
6 |
M = 24 кНм |
|
|
M = 24 кНм |
|
|
EI |
0,6EI |
|
0,6EI |
|
EI |
|
3 |
3 |
6 |
|
6 |
3 |
3 |
7 |
|
|
g = 1 кН/м |
|
|
|
EI |
|
0,6EI |
|
EI |
|
0,6EI |
6 |
|
6 |
3 |
3 |
|
6 |
|
|
|
P=4кН |
|
|
|
Рис.12.20
13. Метод переміщень
13.1.Короткі відомості про метод переміщень
Метод переміщень є одним з найбільш розповсюджених методів розрахунку стержневих статично невизначуваних систем. У багатьох випадках застосування методу призводить до меншої трудомісткості обчислювальних робіт, ніж метод сил.
Припущення методу переміщень
Метод переміщень ґрунтується на спрощуючих припущеннях, від яких залежить кількість основних невідомих методу.
1)Кути між стержнями, які збігаються у жорсткому вузлі, не змінюються після деформування споруди. Це означає, що при деформуванні всі кінці стержнів, з’єднані між собою в жорсткому вузлі, повертаються на однаковий кут.
2)Деформаціями від поздовжніх і поперечних сил можна знехтувати.
3)Не береться до уваги зближення кінців стержня внаслідок його згину.
4)Довжина проекції стержня на його початковий напрям до і після деформації вважається незмінною.
5)Кути нахилу стержнів внаслідок їх мализни обираються рівними їх тангенсам і синусам.
Ці припущення базуються на тому, що в реальних стержневих системах переміщення від пружних деформацій вельми незначні, порівняно з розмірами споруди, а відтак їх вплив на зміну її розмірів можна не враховувати.
Основна система методу переміщень
Основна система методу переміщень утворюється з вихідної системи введенням у її вузли додаткових з’єднань двох видів.
1. Для запобігання повороту жорстких вузлів до них встановлюються, так звані, рухомі (плаваючі) затиснення. Це такі умовні з’єднання, які усувають повороти вузлів, але не усувають їх поступальні переміщення. У таких затисненнях виникає лише одна реакція реактивний момент.
Жорсткими вузлами є місця з’єднання кінців прямолінійних стержнів постійної жорсткості за допомогою припаювання. До жорстких вузлів треба віднести точки, в яких:
з’єднуються без наскрізних шарнірів два або більше стержнів;
228
змінюється під кутом напрям осі стержня;
до стержня приєднується за допомогою прилеглого шарніра інший стержень або кілька стержнів;
ступінчасто змінюється жорсткість стержня;
до жорсткого вузла будь-якого з перелічених типів приєднується шарніром стержень або інший вузол .
2.Можливі поступальні переміщення вузлів системи виключаються встановленням
додаткових опорних стержнів. У таких стержнях виникає лише одна реакція спрямована вздовж стержня сила. Кількість додаткових стержнів повинна бути мінімальною, але достатньою для забезпечення нерухомості всіх вузлів системи.
Додаткові опорні стержні потрібно встановлювати не до всіх вузлів системи, а лише до тих, що мають незалежні поступальні переміщення. Для визначення кількості незалежних поступальних переміщень та місць встановлення необхідних додаткових опорних стержнів доцільно скористатися шарнірною схемою. Шарнірна схема утворюється введенням наскрізних шарнірів в усі жорсткі вузли вихідної системи, включаючи опорні. Зауважимо, що при створенні шарнірної схеми консолі та інші статично визначувані фрагменти можна відкидати.
Якщо шарнірна схема геометрично незмінювана, то вихідна система не має незалежних поступальних переміщень, тобто при створенні основної системи методу переміщень встановлювати додаткові опорні стержні не потрібно.
Якщо ж у процесі структурного аналізу шарнірної схеми виявляється можливість поступального переміщення якогось вузла, необхідно ввести додатковий опорний стержень, який перешкоджає появі цього переміщення. Мінімальна кількість таких додаткових опорних стержнів визначає кількість незалежних переміщень вузлів вихідної системи. При створенні основної системи методу переміщень додаткові опорні стержні необхідно встановлювати саме в цих місцях.
Основні невідомі
Переміщення, які виключаються з’єднаннями, накладеними при створенні основної системи, розглядаються як основні невідомі методу переміщень.
Таким чином, основними невідомими методу переміщень є кути повороту жорстких вузлів системи та незалежні поступальні переміщення її вузлів. Ці невідомі позначаються літерами
1, 2 , , 1, 2 , тощо при використанні розгорнутої форми методу переміщень, чи Z1, Z2 ,
тощо в канонічної формі.
Кількість основних невідомих методу переміщень називається ступенем кінематичної невизначуваності системи. Її можна визначити за формулою
|
229 |
k k k , |
(13.1) |
де k кількість кутових переміщень жорстких вузлів системи, k кількість незалежних лінійних переміщень її вузлів.
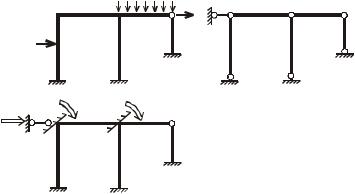
Рама (рис.13.1,а) має два проміжних жорстких вузла 3 і 4, в її шарнірну схему необхідно ввести один додатковий опорний стержень (рис.13.1,б). Отже, маємо ступінь кінематичної невизначуваності k=2+1=3. Основна система рами зображена на рис.13.1,в.
|
|
q |
|
б |
|
а |
|
P2 |
|
|
|
3 |
4 |
5 |
3 |
4 |
5 |
P1 |
|
|
|
|
|
|
|
6 |
|
|
6 |
1 |
2 |
|
1 |
2 |
|
в |
Z 1 |
Z 2 |
|
|
|
Z 3 |
|
|
|
||
|
|
|
|
||
3 |
4 |
5 |
|
|
|
6
1 2
Рис.13.1
Система розв’язувальних рівнянь
Основна система буде еквівалентною заданій рамі за умови рівності нулю реакцій в додаткових з’єднаннях. Ця обставина використовується для складання системи розв’язувальних рівнянь.
Розв’язувальні рівняння методу переміщень утворюють систему лінійних алгебраїчних рівнянь відносно невідомих переміщень, яким перешкоджають накладені додаткові з’єднання, і можуть бути одержані в канонічній формі або в розгорнутій формі.
У канонічній формі система розв’язувальних рівнянь має вигляд
|
r11Z1 |
r12Z2 |
r1nZn R1 p |
0, |
|
||
|
r21Z1 |
r22Z2 |
r2nZn R2 p |
0, |
(13.2) |
||
|
|
|
|
|
|
|
|
|
|
||||||
|
rn1Z1 |
rn2Z2 rnnZn Rnp |
0. |
|
|||
Тут Z1, Z2 , , Zn |
основі невідомі методу переміщень, |
пронумеровані підряд, rjk реакція |
|||||
(реактивний момент у рухомому затисненні або реактивна сила у додатковому стержні) у
накладеному з’єднанні j основної системи від примусового переміщення Zk 1, R jp реакція в
накладеному з’єднанні j від зовнішнього навантаження.

230
Система розв’язувальних рівнянь (13.2) має стандартний (канонічний) вигляд і називається
системою канонічних рівнянь методу переміщень.
Для визначення коефіцієнтів і вільних членів системи рівнянь (13.2) необхідно заздалегідь побудувати епюри згинальних моментів в основній системі від одиничних значень основних невідомих Z1, Z2 , , Zn і від дії зовнішнього навантаження. Побудова одиничних і вантажної епюр здійснюється за допомогою даних, наведених у таблиці 13.1.
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Таблиця 13.1 |
|
Схема балки та |
|
|
|
Кінцеві |
|
|
|
|
|
|
|
|
|
Епюри |
||||||||||||||||
№ |
навантаження |
|
|
|
зусилля |
|
|
|
|
|
|
|
|
|
згинальних моментів |
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
1 |
|
Mab 4i, |
|
|
Mba 2i; |
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
6i . |
|
|
|
||||||||||||||||||
|
|
|
Q Q |
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
ab |
|
ba |
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
M ab Mba |
6i |
; |
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
||||
|
Q |
|
Q |
|
|
|
|
|
12i |
. |
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
ab |
|
|
ba |
|
|
|
|
|
|
|
l2 |
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
M |
M |
|
|
|
|
ql2 |
|
; |
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
3 |
|
ab |
|
|
|
ba |
|
|
|
|
|
|
|
|
|
|
|
12 |
|
|
|
|
|||||||||
|
Q |
Q |
|
|
|
|
ql |
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
ab |
|
|
ba |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
M |
|
M |
|
|
|
|
|
Pl |
; |
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
4 |
|
|
ab |
|
|
|
|
ba |
|
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|||||||||||
|
Q |
Q |
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
ab |
|
|
ba |
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
M |
|
M |
|
|
|
|
|
|
M |
|
|
; |
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
5 |
|
|
ab |
|
|
|
ba |
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
Q |
Q |
|
|
1,5M |
. |
|
||||||||||||||||||||||||
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
ab |
|
|
ba |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
M ab 3i; |
|
Mba 0; |
|
||||||||||||||||||||||||||
6 |
|
Q |
|
Q |
|
|
|
3i |
. |
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
ab |
|
|
ba |
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Mab |
|
3i |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
7 |
|
|
|
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Mba 0; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
Q |
|
|
Q |
|
|
|
|
3i |
. |
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
ab |
|
|
ba |
|
|
|
|
|
|
l2 |
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
231
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Закінчення таблиці 13.1 |
|
|
|
Схема балки та |
|
|
|
|
|
Кінцеві |
|
|
|
|
Епюри |
|
||||||
|
№ |
навантаження |
|
|
|
|
зусилля |
|
|
|
згинальних моментів |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
M |
|
|
ql2 |
; |
M |
|
|
|
0; |
|
|
||||||
|
8 |
|
|
ab |
|
|
|
|
8 |
|
|
|
ba |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Q |
|
5 ql; Q |
|
3 ql. |
|
|
|||||||||||
|
|
|
ab |
|
|
8 |
|
|
|
ba |
|
|
|
8 |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
M |
|
|
|
|
3 |
Pl; |
M |
|
|
|
0; |
|
|
||||
|
|
|
|
ab |
|
|
|
|
16 |
|
|
|
|
ba |
|
|
|
|
||
|
9 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
11 |
|
|
|
|
|
|
|
5 |
|
|
|
||
|
|
|
Q |
|
P; Q |
|
|
|
P. |
|
|
|||||||||
|
|
|
16 |
|
16 |
|
|
|||||||||||||
|
|
|
ab |
|
|
|
|
ba |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Реакції в додаткових з’єднаннях rjk |
|
|
і |
|
|
|
Rjp |
|
обчислюються з умов рівноваги вузлів рами |
|||||||||||
(реактивні моменти в рухомих затисненнях) або відсічених частин рами (реакції в додаткових стержнях). При цьому реакції вважаються додатними, якщо їхні напрями збігаються з напрямами примусових переміщень, які надавались відповідним вузлам при побудові одиничних епюр.
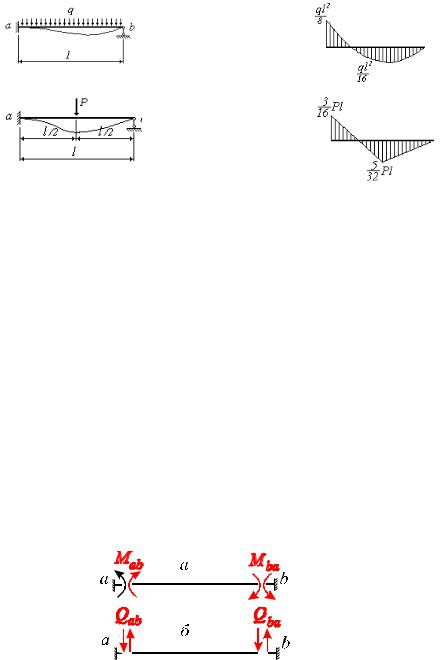
У розгорнутій формі для складання системи розв’язувальних рівнянь використовуються формули, що виражають внутрішні зусилля на кінцях статично невизначуваних однопрогонових балок (кінцеві зусилля) залежно від переміщень опор і зовнішніх навантажень (див.табл.13.2).
Згинальні моменти вважаються додатними, якщо вони діють на вузол навпроти, а на стержень
за годинниковою стрілкою (рис.13.2,а). Додатні поперечні сили обертають і вузол і стержень за годинниковою стрілкою (рис.13.2,б). Додатні напрями кутів повороту і кутів перекосу стержнів
приймаються в напрямі руху годинникової стрілки.
Рис.13.2
Для складання будь-якого розв’язувального рівняння слід прирівняти до нуля реакцію у відповідному додатковому з’єднанні. Якщо це рухоме затиснення, то необхідно вирізати вузол, на який було накладене означене затиснення. Реактивний момент, який визначається як сума кінцевих моментів в усіх стержнях, що примикають до вирізаного вузла, прирівнюється нулю. Якщо ж розглядається додатковий опорний стержень, то слід відокремити частину рами, яка утримується від переміщення означеним стержнем. До відокремленої частини необхідно