

bmp
.pdf242
Fx 0,996 0,996 0;
Fy 16,998 4,725 16,575 6 2 8 0,002 0;
M 4 16,988 6 0,966 9 2,189 2 2 26 2 6 3 16,575 0.
13.3. Розрахунок несиметричної рами в розгорнутій формі
Розглянемо раму, яка була розрахована в попередньому підрозділі. Схема рами наведена на рис.13.12,а.
Рис.13.12
Основні невідомі і основна система методу переміщень
Основні невідомі це кути повороту проміжних жорстких вузлів 1 і 2 , а також незалежне лінійне переміщення . Повороти затиснень в опорних вузлах 3 4 0 .
На шарнірній схемі (рис.13.12,б) показано кути перекосу, які за мализною кутів беруться рівними відповідним тангенсам:
1 2 4 , 2 3 5 , 1 4 0, 2 5 0.
(додатними вважаються кути перекосів за годинниковою стрілкою). Основні невідомі методу і основна система зображено на рис.13.12,в.
Складання розв’язувальних рівнянь
Розв’язувальні рівняння складаємо з умов рівності нулю реакцій в накладених з’єднаннях. Реактивний момент пружного затиснення вузла 1 виражається через кінцеві моменти в
стержнях з умови рівноваги вузла 1.

 2-3
2-3
244
Q2 3 |
|
6i2 3 |
2 3 |
2 2 3 Q2 3 |
6i0 |
|
2 |
0 2 |
|
0 |
|
|
||||||||
l2 3 |
|
5 |
|
|
5 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
1,2i0 2 0,48i0 ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Q2 1 |
|
6i |
|
1 2 2 1 Q2 3 |
6i |
|
|
2 |
1 |
2 |
|
|
|
0 |
|
|||||
|
2 1 2 |
0 |
|
|
|
|
||||||||||||||
|
|
l2 1 |
|
|
|
4 |
|
|
|
|
|
|
|
|
4 |
|
|
|
||
|
1,5i0 2 |
1,5i0 1 |
0,75i0 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
R 1,5i0 1 0,3i0 2 1, 23i0 0.
Отже, маємо систему рівнянь |
|
|
|
|
12i0 1 |
2i0 2 |
1,5i0 |
12 |
0; |
2i0 1 |
14i0 2 |
0,3i0 |
5 |
0; |
1,5i0 1 |
0,3i0 2 |
1,23i0 |
|
0, |
яка повністю збігається з системою розв’язувальних рівнянь, одержаних за канонічним способом (див.п.13.2). Система має такий розв’язок:
1 |
1,1437 i0 ; |
2 |
0,2248 i0 ; |
1,4496 i0 . |
Обчислення кінцевих згинальних моментів
Кінцеві згинальні моменти в стержнях рами обчислюємо за формулами табл.13.2. У вузлі 1
M |
|
2i |
2 |
|
3 |
|
M |
2i |
|
2 |
|
|
|
|
M |
|
||||||||||||
|
|
|
3 |
|
|
|||||||||||||||||||||||
1 2 |
|
|
|
1 2 |
1 |
|
2 |
|
|
1 2 |
|
1 2 |
|
0 |
|
|
1 |
2 |
|
|
4 |
|
1 2 |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
1,1437 |
|
|
0,2248 |
|
|
|
1,4496 |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
2i |
|
2 |
|
|
|
|
|
|
|
|
3 |
|
|
|
0 |
2,850.; |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
0 |
|
|
|
i0 |
|
|
i0 |
|
|
|
|
|
4i0 |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M1 4 2i1 4 2 1 4 3 1 4 M1 4 2 2i0 2 1 4 3 1 4 M1 4
|
|
|
1,1437 |
|
|
|
|
16 6 |
|
||
|
|
|
|
|
|
|
|||||
4i0 |
2 |
|
|
|
0 0 |
|
|
|
|
|
2,850. |
|
i0 |
8 |
|||||||||
|
|
|
|
|
|
|
|
|
|
||

245
У вузлі 2
M |
|
|
2i |
2 |
|
|
|
3 |
|
|
M |
2i |
|
|
2 |
|
|
|
|
|
|
|
M |
|
|
||||||||||||||
2 1 |
2 |
|
1 2 |
0 |
|
2 |
3 |
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
|
|
1 2 |
|
|
|
|
1 |
|
|
|
|
2 1 |
|
|
|
|
1 |
|
|
|
|
|
4 |
|
2 1 |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0,2248 |
|
|
1,1437 |
|
|
|
|
1,4496 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
2i |
0 |
|
2 |
|
|
|
|
|
|
|
|
|
|
|
3 |
|
|
|
|
0 1,012. |
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
i0 |
|
|
|
|
i0 |
|
|
|
|
|
|
4i0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
M 2 5 |
3i2 5 2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
2 5 M 2 5 3 2i0 2 2 5 |
M 2 5 |
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
0,2248 |
|
|
|
|
|
|
|
2 62 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
6i |
0 |
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
7,651. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
i0 |
|
|
|
|
|
|
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
M 2 3 |
2i2 3 2 2 3 3 2 3 M 2 3 |
2i0 |
|
|
|
|
3 |
|
M 2 3 |
|
|
||||||||||||||||||||||||||||
2 2 3 |
5 |
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
0,2248 |
|
|
|
1,4496 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
2i |
0 |
|
2 |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
0 2,639. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
i0 |
|
|
|
|
|
|
|
|
5i0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
M 2 к |
|
|
|
2 2 |
2 |
|
4. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вузол 3.
M |
3 2 |
2i |
|
|
2 |
2 |
3 |
2 3 |
M |
|
2i |
|
2 |
2 |
3 |
|
M |
|
||||
|
3 2 |
|
3 |
|
|
|
3 2 |
0 |
|
3 |
|
|
3 2 |
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
2i0 |
|
0 |
0,2248 |
3 |
|
1,4496 |
|
0 2,189. |
|
|
|
|
|
|||||||
|
|
|
i0 |
|
|
|
5i0 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Вузол 4.
M4 1 2i1 4 2 4 1 3 1 4 M4 1 2 2i0 2 4 1 3 1 4 M4 1
4i0 |
|
0 |
|
1,1437 |
0 |
|
|
16 |
6 |
16,5755. |
|
i0 |
|
8 |
|||||||
|
|
|
|
|
|
|
|
|||
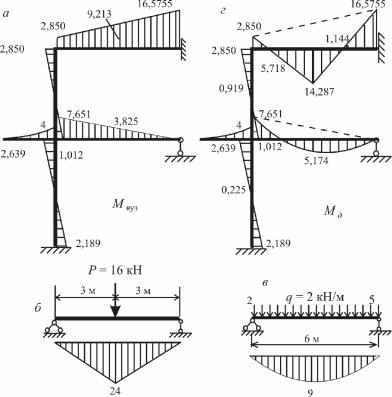
Відклавши величини кінцевих моментів на схемі рами одержуємо епюру вузлових згинальних
моментів Mвуз (рис.13.13,а).
246
Рис.13.13
До епюри вузлових моментів слід додати епюри згинальних моментів, побудовані в навантажених стержнях як у простих балках (рис.13.13,б,в). Дійсна епюра згинальних моментів Mд (рис.13.13,г) одержана накладенням епюр в однопрогонових балках на епюру вузлових моментів.
Подальший розрахунок повністю збігається з розрахунком рами в канонічній формі
(див.п.13.2).
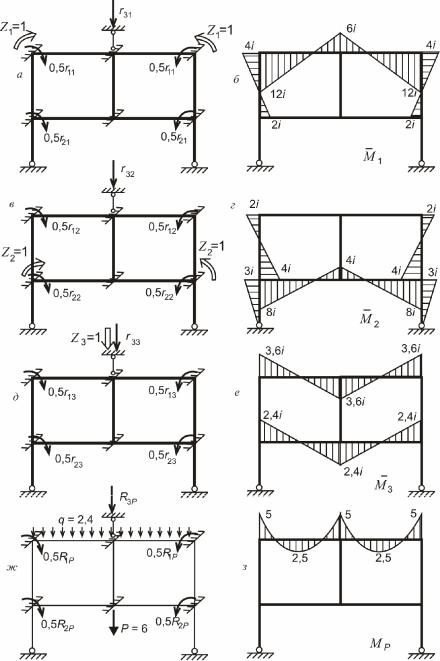
13.4. Розрахунок симетричної рами на симетричне навантаження
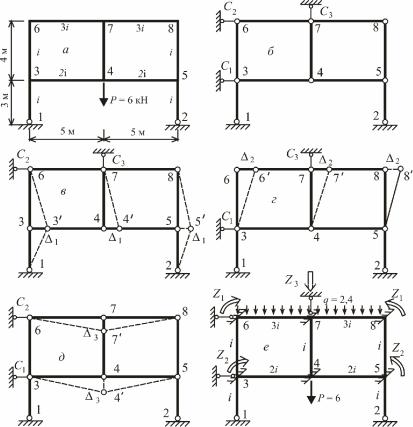
Виконаємо розрахунок статично невизначуваної рами на симетричне навантаження
(рис.13.14,а).
Визначення кількості основних невідомих і призначення основної системи
Рама має шість проміжних жорстких вузлів, отже
k 6 3, 4 , 5 , 6 , 7 , 8 .
Для визначення кількості незалежних поступальних переміщень вузлів утворюємо шарнірну схему рами шляхом введення в усі жорсткі вузли наскрізних шарнірів (рис.13.14,б). Аналізуючи геометричну структуру шарнірної схеми доходимо висновку, що для забезпечення її геометричної незмінюваності достатньо ввести три додаткові опорні стержні С1, С2 і С3. Це означає, що k = 3.
247
Очевидно, що стержень С1 усуває лише горизонтальне переміщення 1 ригеля 6-7-8 (рис.13.14,в),
стержень С2 лише горизонтальне переміщення 2 ригеля 3-4-6 (рис.13.14,г), а стержень С3
вертикальне переміщення 3 стояка 4-7 (рис.13.14,д). Таким чином кількість основних невідомих
k = k + k = 8
Основна система, утворена накладенням плаваючих затиснень і додаткових опорних стержнів, які усувають переміщення вузлів, наведено на рис.13.14,е.
Рис.13.14
Позначення основних невідомих
Оскільки на симетричну раму діє симетричне навантаження, її напружено-деформований стан буде також симетричним. На цій підставі можна вважати, що вузли, розташовані на осі симетрії не повертаються, тобто 4 7 0 . Нулю дорівнюють й поступальні переміщення вузлів, які порушують симетрію: 1 2 0 . З іншого боку, кути повороту симетрично розташованих вузлів повертаються в протилежних напрямах і за величиною дорівнюють один одному. Одночасні симетричні повороти таких вузлів будемо розглядати як групові основні невідомі:

249
r31 |
Для визначення реакції r31 вирізаємо і аналізуємо |
||
3,6i |
3,6i рівновагу |
стояка 4-7. Поперечні сили в стержнях |
|
7 |
|
|
|
|
визначаємо за епюрою M1 . |
||
4 |
Fy 0 |
|
r31 3,6i 3,6i 0. |
r31 7,2i.
Реакції від дії основного невідомого Z2 = 1 показано на рис.13.15,в. Відповідна епюра згинальних моментів M2 побудована на рис.13.15,г. Почергово вирізаємо вузли, на які накладено плаваючі затиснення, і аналізуємо їх рівновагу. В місцях розрізів до стержнів прикладаються згинальні моменти, які вибираються з епюри згинальних моментів M2 .
M 0 |
|
0,5r12 2i 0. |
|
|
r12 4i. |
M 0 |
|
0,5r22 4i 8i 3i 0. |
|
|
r22 30i. |
Для визначення реакції r31 вирізаємо і аналізуємо рівновагу стояка 4-7. Поперечні сили в стержнях визначаємо за епюрою M2 .
Fy 0 |
|
r32 2,4i 2,4i 0. |
|
|
r32 4,8i. |
Визначаємо реакції від дії основного невідомого Z3 = 1 (рис.13.15,д). Епюра згинальних моментів M3 побудована на рис.13.15,е. Почергово аналізуємо рівновагу закріплених від поворотів вузлів. В місцях розрізів стержнів прикладаються згинальні моменти, які вибираються з епюри згинальних моментів M3 .
M 0 |
|
0,5r13 3,6i 0. |
||
|
|
|
|
r13 7,2i. |
|
|
|
|
|
|
M 0 |
|
0,5r23 2,4i 0. |
|
|
|
|
|
|
r23 4,8i.
250
Рис.13.15
Для визначення реакції r33 вирізаємо і аналізуємо рівновагу стояка 4-7. Поперечні сили в стержнях визначаємо за епюрою
|
|
3 . |
|
|
|
M |
|
|
|
||
Fy |
0 |
|
r33 1,44i 1,44i 0.48i 0,48i 0. |
||
|
|
|
|
|
r33 3,84i. |
 P
P