

4.6. Датчики обратной связи в системах чпу
Числовое программное управление координатными перемещениями с достижением при этом необходимой точности обеспечивается благодаря соответствующим устройствам обратной связи по положению, объединяемым общим названием "системы дистанционного отсчета". По принципу измерения они разделяются на две группы: 1) системы с абсолютными датчиками положения; 2) системы с циклическими датчиками положения.
В системах первой группы для каждого десятичного разряда отсчета перемещения обычно служит свой датчик положения, цена деления которого соответствует данному разряду. Системы второй группы содержат один циклический датчик (датчик точного отсчета), и результат во всех разрядах отсчета формируется путем подсчета числа циклов датчика.
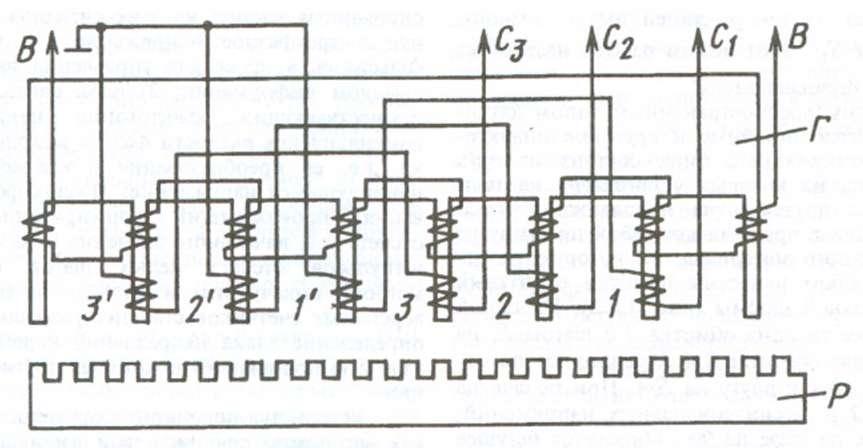
Рис.4.21. Схема бесконтактного линейного сельсина
Системы первой группы устойчивы к сбоям и перерывам в работе и могут функционировать при более высоких скоростях перемещений подвижных узлов станка.
Системы второй группы конструктивно более просты, но предъявляют повышенные требования к быстродействию считывания и переработки измерительной информации (особенно при больших скоростях перемещений), менее устойчивы к сбоям и перерывам в работе и обладают свойством сохранять и накапливать ошибки отсчета.
По типу измерительной информации датчики положения, входящие в системы, делятся на дискретные (импульсные) и аналоговые (чаще всего фазовые).
По конструкции измерительного устройства различают круговые и линейные датчики положения .Наибольшую точность могут обеспечить линейные датчики (типа линейного сельсина или индуктосина), которые монтируют непосредственно на подвижных узлах станка. Круговые датчики (вращающиеся сельсины, иначе называемые вращающимися или поворотными трансформаторами) устанавливают на каком-либо узле кинематической цепи подачи, обычно на шариковом ходовом винте. Они могут приводиться во вращение также от измерительной рейки, закрепленной на подвижном уале, через связанное с рейкой зубчатое колесо. В этом случае на точность измерений влияют погрешности кинематической цепи между подвижным узлом и датчиком.
В системах первой группы применяются в основном круговые кодовые датчики положения. Датчики же, выдающие информацию по одному каналу в виде серии импульсов, число которых пропорционально величине перемещения, применяются главная образом в системах второй группы. Среди аналоговых датчиков, используемых в системах, относящихся к обеим группам, наиболее распространены фазовые датчики положения.
Характерным примером аналогового фазового датчика, применяемого в станках, может служить круговой (обычно пятидекадный) абсолютный датчик положения с измеряемым перемещением до 10000 мм, в котором с помощью измерительной зубчато-реечной пары приводятся во вращение бесконтактные сельсины. Между сельсинами соседних декад установлен редуктор с передаточным числом 10. Такие датчики применяются в ряде типовых приводов подач станков с ЧПУ.
В качестве датчика точного отсчета может использоваться также линейный датчик, работающий в фазовом режиме. Характерным примером таких датчиков является бесконтактный линейный сельсин (рис.4.22), состоящий из рейки Р с прямоугольными зубьями и измерительной головки Г, устанавливаемых соответственно на неподвижном и перемещаемом узлах станка.
На измерительной головке имеется трехфазная обмотка (Ci-1-Г; 02-2-2"; С3-3-3"), причем каждая фаза охватывает третий по счету зубец. Магнитная проводимость каждого из ее зубцов меняется по закону, приближающемуся к синусоидальному.
При подаче на обмотку В синусоидального напряжения с амплитудой £/щах и перемещении головки на величину х в фазах Cj, Ci, С3 индуцируются синусоидальные ЭДС, амплитуды которых изменяются по косину- синусоидальному закону.
Фаза этих напряжений изменяется на 180° при переходе через нулевое положение. Такой режим работы называется трансформаторным.
При подаче синусоидального напряжения на трехфазную обмотку головки образуется бегущее магнитное поле, а в ее однофазной обмотке индуцируется ЭДС, фаза которой изменяется по линейному закону: Ф = 2юс / Sр . Этот режим работы называется режимом фазовращателя.
Другим распространенным типом датчиков являются линейные и круговые индуктосины. Датчик такого типа состоит из двух шкал, одна из которых установлена на подвижном, а другая - на неподвижном узлах станка. Шкала представляет собой пластину из изоляционного материала, на которую печатным способом нанесены обмотки с витками прямоугольной формы (рис.4.21). На одной шкале имеется одна обмотка 1 с шагом S, на другой - две обмотки 2 и 3, сдвинутые по отношению друг к другу на S/4. При подаче на обмотки 2 и 3 синусоидальных напряжений, сдвинутых по фазе на 90°, образуется бегущее магнитное поле, и в обмотке / индуцируется ЭДС, фаза которой ср = 2кх / S , где X - перемещение шкалы.
Отдельным видом систем дистанционного отсчета являются устройства цифровой индикации (УЦИ). Как правило, они шестиразрядные и базируются на циклических (фазовых) датчиках положения. Принцип работы подобного УЦИ заключается в следующем. Измеряется разность фаз между опорным сигналом (напряжением) и выходным сигналом датчиков младших разрядов. Затем временной интервал, соответствующий этой разности, преобразуется в дискретную величину (операция квантования), имеющую вид числа, записанного в один или два младших разряда УЦИ. После этого формируются показания в старших разрядах УЦИ путем подсчета (с помощью реверсивных счетчиков) числа импульсов, возникающих в моменты совпадения фаз опорного напряжения и выходного сигнала датчика. Обычно это происходит через каждый миллиметр перемещения узла станка.
Основными компонентами УЦИ являются: 1) блок опорного сигнала, генерирующий сигналы прямоугольной формы с рядом фиксированных частот; из этих сигналов формируется трехфазное напряжение для питания сельсинов, а также для управления вводом и выводом информации; 2) блок согласования, осуществляющий квантование непрерывно изменяющейся разности фаз на выходе датчика, т.е. ее преобразование в скачкообразно изменяющееся напряжение; 3) блок формирования, производящий формирование базы отсчета (т.е. начального значения показаний) и импульсов отсчета целых шагов (миллиметров), выдачу этих импульсов на блок реверсивных счетчиков старших разрядов УЦИ, определение знака направления перемещения узла и выполняющий некоторые другие функции.
Устройства подобного типа используются как автономно для цифровой индикации
положения рабочих органов на станках с ручным управлением, так и для управления приводами в режимепозиционирования на станках с ЧГ1У. На основе этих же принципов измерений с использованием линейных либо круговых датчиков обратной связи создают следящие электроприводы с цифровым управлением. Последние в сочетании с системой ЧПУ способны полностью заменить электрогидравлические шаговые приводы, что особенно эффективно при использовании высокомоментных электродвигателей, соединяемых непосредственно с шариковым ходовым винтом без промежуточных кинематических звеньев.
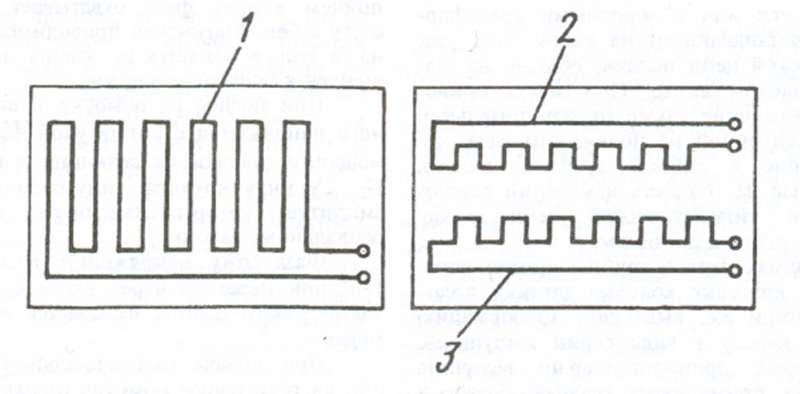
Рис. 4.22. Схема линейного индуктосина
1