

Методички / Н.Н. Демидова Физика. Методические указания по выполнению контрольных работ для студентов заочной формы обучения (сокращенные сроки обучения на базе среднего проф. образования)
.pdfМИНИСТЕРСТВООБРАЗОВАНИЯРОССИЙСКОЙФЕДЕРАЦИИ КУЗБАССКИЙГОСУДАРСТВЕННЫЙТЕХНИЧЕСКИЙУНИВЕРСИТЕТ
КАФЕДРА ФИЗИКИ
ФИЗИКА
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ КОНТРОЛЬНЫХ РАБОТ
для студентов заочной формы обучения (сокращённые сроки обучения на базе среднего профессионального образования)
Составители: Н. Н. Демидова Т. В. Лавряшина Э. Н. Лебединская А. А. Мальшин
Утверждены на заседании кафедры Протокол №9 от 25.06.01 Рекомендованы к печати методической комиссией направления 550600 Протокол №9 от 19.06.01 Электронная копия находится в библиотеке главного корпуса КузГТУ
Кемерово 2001
1
МЕТОДИЧЕСКИЕ УКАЗАНИЯ ПО ВЫПОЛНЕНИЮ КОНТРОЛЬНОЙ РАБОТЫ №1
В контрольную работу №1 включены задачи по основам механики. По каждому разделу изучаемых тем даются ссылки на учебники. Не приступайте к решению задач, не проработав теоретический материал соответствующего раздела.
1. Задачи 1.1-1.10 на тему «Кинематика поступательного и вращательного движения» [1, §1-4]; [2, гл.1, §4.1]; [3, §6].
•Перед решением задач этой темы повторите основные понятия
кинематики: |
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
скорость V и ускорение ar при поступательном движении |
||||||||||||||||||||||||||||
тел (задачи 1.1-1.3,r |
1.5, 1.6), |
r |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
угловая скорость ω и угловое ускорение ε при вращательном |
||||||||||||||||||||||||||||
движении (задачи 1.4, 1.7-1.10). |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
•Обратите внимание на аналогию в определении кинематических |
||||||||||||||||||||||||||||
характеристик поступательного и вращательного движений. |
|
Таблица |
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
ПОСТУПАТЕЛЬНОЕ ДВИЖЕНИЕ |
|
ВРАЩАТЕЛЬНОЕ ДВИЖЕНИЕ |
||||||||||||||||||||||||||
Скорость |
|
|
r |
|
|
|
d rr |
|
|
|
|
Угловая скорость |
|
r |
= |
dϕr |
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
(мгновенная) |
|
|
V = |
|
|
|
|
|
|
|
|
(мгновенная) |
|
ω |
|
|
|
|
|
|
||||||||
|
|
|
d t |
|
|
|
|
|
d t |
|
|
|
|
|||||||||||||||
Модуль |
|
V = |
|
d rr |
|
= |
d S |
|
Модуль угловой |
|
ω = |
dϕ |
|
|
||||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||||||
скорости |
|
|
|
|
|
|
|
|
|
|
|
скорости |
|
d t |
|
|
|
|
||||||||||
|
|
d t |
|
d t |
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Пройденный |
|
S = |
∫ |
V d t+S0 |
|
Угол поворота |
ϕ = |
∫ |
ωd t+ϕ0 |
|||||||||||||||||||
путь |
|
|
||||||||||||||||||||||||||
Среднее |
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
Среднее угловое |
|
|
|
|
|
r |
|
|
||||
|
|
r |
|
|
|
∆V |
|
|
|
|
|
r |
= |
∆ω |
|
|
||||||||||||
ускорение |
|
|
a |
|
= |
|
∆t |
|
|
|
|
ускорение |
|
ε |
∆t |
|
|
|||||||||||
Ускорение |
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
r |
|
Угловое ускоре- |
|
|
|
|
r |
|
|
r |
|||
r |
|
|
|
|
|
∆V |
|
|
|
d V |
|
r |
|
|
∆ω |
|
|
d ω |
||||||||||
(мгновенное) |
a |
= lim |
|
|
|
|
|
= |
|
|
|
|
ние (мгновенное) |
ε = lim |
|
|
|
= |
|
|
||||||||
|
∆t |
|
d t |
|
∆t |
d t |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r
•Направление вектора средней скорости <V> определяется rнаправлением вектора перемещения ∆rr (рис.1.1). Вектор скорости V в данный момент времени направлен по касательной к траектории.

|
|
|
|
|
2 |
|
t1 |
|
|
r |
|
|
|
|
|
t1 |
|
|
|
|
|
|
V1 |
|
|
||
|
|
|
r |
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
V1 |
|
|
r |
|
|
r < a |
> |
||
|
|
< ∆ V > |
rr |
|
V2 |
|
∆ V |
|
t2 |
||||
|
|
r |
|
|
|
||||||||
|
|
r |
|
|
|
|
|
|
|
||||
|
|
r |
|
∆ r |
1 |
|
|
|
|
|
|
|
|
|
|
|
t2 |
|
|
|
|
|
|
|
|
||
|
|
r1 |
|
|
r |
|
|
|
r |
|
|
||
|
|
|
|
|
V2 |
|
|
|
|
|
|||
|
|
|
|
rr2 |
|
|
|
|
r2 |
|
|
||
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.1 |
|
|
|
Рис. 1.2 |
|
||||||
•Вектор среднего ускорения <ar> совпадает по направлению с век- |
|||||||||||||
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
тором приращения скорости ∆V (рис. 1.2). |
|
|
|
|
|
|
|
|
|||||
•Направление вектора полного ус- |
|
|
|
|
|
|
|
|
|||||
корения ar, равного векторной сумме |
|
|
аτ (аτ<0) |
|
|||||||||
тангенциального aτ и нормального an |
r |
r |
|
|
|
rτ |
|
||||||
ускорений зависит, от величины этих |
a |
|
n |
|
|
|
|
аτ (аτ>0) |
|||||
|
|
|
|
|
|
|
|||||||
ускорений (рис. 1.3) |
|
|
|
|
|
аn |
|
|
|||||
где rτ - |
|
ar = an nr+ aτ rτ, |
|
|
R |
|
|
|
|
|
r |
||
единичный вектор (орт), на- |
O |
|
|
|
|
r |
V |
||||||
правленный по касательной к траекто- |
|
|
|
|
a |
|
|||||||
|
|
Рис. 1.3 |
|
||||||||||
рии (по скорости); nr |
- единичный вектор |
|
|
|
|
|
|
|
|
||||
(орт) нормали к траектории (перпендику- |
|
|
|
|
dω |
|
|
||||||
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
лярно скорости); a |
n |
– проекция ускоре- |
|
|
|
|
dt |
< 0 (ε < 0) |
|||||
|
|
|
r |
aτ - проекция |
|
|
|
|
|
|
|
|
|
ния на вектор нормали n ; |
|
|
|
|
|
|
dϕ |
||||||
ускорения на вектор скорости. |
|
|
dϕr |
|
|
|
r |
||||||
|
|
|
|
|
|||||||||
•При вращательном движении векто- |
|
|
r |
|
|
|
V |
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
r |
r |
|
|
|
|
|
ω |
|
r |
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
||||||
ры dϕ , |
ω |
и ε направлены вдоль оси |
|
|
|
|
dω |
> 0 (ε > 0) |
|||||
вращения (рис. 1.4), причём направление |
|
|
|
|
dt |
|
|
||||||
вектора угла поворота dϕr |
связано с на- |
|
|
Рис. 1.4 |
|
||||||||
правлением вращения правилом правого винта. |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
||||||
ПРИМЕР 1.1. Точка движется по окружности радиусом R =10 см так, что зависимость линейной скорости V от времени t даётся уравнением V = A - B t2, где A = 5 м/с, В = 1 м/с2. Определить: 1) пройденный путь S1, средние значения скорости <V> и ускорения <a> за 2 с от начала движения; 2) тангенциальное аτ , нормальное аn и полное а ускорение точки в конце второй секунды; 3) угловую скорость ω и угловое ускорение ε в конце второй секунды.
3
Дано:
R =10 см V = A - B t2
A = 5 м/с
В = 1 м/с2 t1 = 2 c
S1, <V>, <a>, аτ, аn, а, ω, ε -?
|
|
|
|
РЕШЕНИЕ. |
|
|
|
|
|
|||||
1) Путь S1, пройденный за время 2 с: |
|
|
|
|
|
|||||||||
t |
t |
|
|
|
|
|
|
t |
|
t |
|
|
|
|
S1 = ∫1 |
V(t) d t = ∫1 |
(A− B t2 ) d t = ∫1 |
A d t− ∫1 B t2 d t = |
|||||||||||
t0 |
0 |
|
|
|
|
0 |
|
0 |
|
|
|
|
||
t |
t |
|
|
|
t3 |
|
|
2 |
|
|
8 |
|
||
|
|
|
|
|
|
|
||||||||
= A ∫1 d t− B ∫1 t2 d t =A t |
|
02 − B |
|
|
|
= 5 2 |
−1 |
= 7,4 м. |
||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
3 |
|||||||||
|
|
|
|
|
|
|
|
|||||||
0 |
0 |
3 |
|
0 |
|
|
|
|||||||
|
|
|
|
|
|
|
||||||||
Средняя скорость <V> движения точки за указанный период времени:
< V >= |
∆S |
= |
S1 |
−S0 |
= |
7,4 |
= 3,7 |
м |
. |
|
∆t |
|
t1 |
− t0 |
2 |
|
|||||
|
|
|
|
с |
||||||
Среднее ускорение <а> движения точки:
< а >= |
∆V |
= |
V1− V0 |
= |
1−5 |
= −2 |
м |
. |
||
∆t |
|
|
2 |
|
|
|||||
|
|
t1− t0 |
|
|
с2 |
|||||
1) Тангенциальное ускорение аτ характеризует быстроту изменения скорости по величине:
aτ = ddVt = −2 B t = −2 1 2 = −4 см2 .
Нормальное ускорение аn характеризует быстроту изменения скорости по направлению и связано с линейной скоростью V и радиусом R окружности соотношением
|
|
|
an |
= |
V2 |
. |
|
|
|
|
Следовательно: |
|
|
R |
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
||
an = (A− B t2 )2 |
= (5 −1 4)2 |
=10 |
м |
. |
||||||
|
|
|||||||||
|
r |
R |
r |
|
r0,1 |
r |
r |
с2 |
||
Полное ускорение a |
= an n+ aτ τ, где τ |
и n - единичные векторы |
||||||||
(орты). Величина полного ускорения |
|
|
|
м . |
||||||
|
a = a2τ + an2 |
= |
16 +100 =10,8 |
|||||||
|
|
|
|
|
|
|
|
|
с2 |
|
Направление векторов ar, тангенциального aτ и нормального an |
||||||||||
изображено на рис. 1.3 (случай аτ<0).
2) Угловая скорость ω связана с линейной скоростью V и радиусом R

4
окружности ω = VR . Вычисления дают ω = A+RB t2 =10 радс .
Угловое ускорение ε может быть определено по известному зна-
чению тангенциального ускорения аτ: |
|
|
||
ε = |
аτ |
= −40 |
рад |
. |
|
|
|||
r |
R r |
с2 |
||
Направления векторов ω и ε изображены на рис.1.4 (случай ε< 0).
ПРИМЕЧАНИЯ 1.1:
1.В задаче 1.1 при определении скорости V и координаты Х учтите начальные условия: V = ∫a(t) d t + V0 и X = ∫V(t) d t + X0 .
2.Для определения средней путевой скорости (задача 1.3) необходимо найти время поворота из условия V(tпов )= X′ = 0 и координату
поворота Xпов =1+ 4 tпов− 2 tпов2 .
3. Решая задачи 1.r4, 1r.7,r1.8,r1.10, обязательно укажите на рисунке направления векторов V, a , ω и ε.
2. Задачи 1.11-1.20 на тему «Законы Ньютона»
[1, §5-8]; [2, §2.1-2.4]; [3, §2].
При решении задач 1.14, 1.15, 1.17 –1.20 данного раздела рекомендуется придерживаться следующего порядка:
•Сделать рисунок и на нём изобразить все силы, действующие на данное тело. Указывая силы, необходимо руководствоваться третьим
законом Ньютона: |
r |
r |
|
F12 |
= −F21 |
силы, с которыми взаимодействуют два тела, равны по модулю и противоположны по направлению.
•Силы могут действовать на это тело только со стороны каких-либо
других тел: |
|
со стороны Земли – сила тяжести m gr |
; |
r |
|
со стороны нити – сила натяжения T ; |
r |
со стороны поверхности - реакция опоры N ; |
|
r |
|
и сила трения Fтр. |
|
Следовательно, к данному телу приложено столько сил, сколько имеется тел, с которыми оно взаимодействует.
5
•Записать второй закон Ньютона в векторной форме для каждого тела:
∑n Fri = m ar.
i=1
Равнодействующая всех сил, приложенных к телу, равна произведению массы тела на его ускорение.
•Выбрать две взаимно перпендикулярныеr оси X и Y, одну (Х) из которыхrнаправляют вдоль ускорения a , другую (Y) –перпендикулярно вектору a . Спроектировать векторы на эти оси и записать второй закон Ньютона в скалярной форме:
n |
n |
∑Fx i = m ax , ∑Fy i = m ay . |
|
i=1 |
i=1 |
•Если тела связаны нитью, переброшенной через блок, и массами нити и блока можно пренебречь (задачи 1.14, 1.17, 1.20), то силы натяжения одинаковы по всей длине, а вследствие нерастяжимости нитей модуль ускорения всех движущихся тел одинаков.
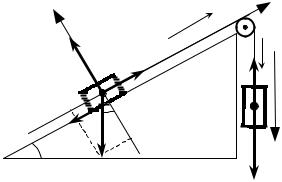
ПРИМЕР 1.2. На наклонной плоскости, составляющей с горизонтом угол α = 30°, находится груз массой m2= 2 кг. К грузу привязан лёгкий шнур, перекинутый через блок, укреплённый на вершине наклонной плоскости. К концу шнура подвешена гиря массой m1= 2,5 кг. Предоставленная самой себе система приходит в равноускоренное движение. Определить ускорение грузов при условии, что коэффициент трения между грузом и плоскостью равен µ = 0,1. Массу блока не учитывать.
Дано: |
|
|
РЕШЕНИЕ. |
|
|
|
α = 30° |
|
В данном примере гиря будет опускаться, а груз подниматься |
||||
m2= 2 кг |
по наклонной плоскости (рис.1.5)r. На гирю действуют: сила |
|||||
m1= 2,5 |
кг |
тяжести m gr |
и сила натяжения T |
, на груз действуют: сила |
||
µ = 0,1 |
|
1 |
r |
1 |
r |
r |
|
|
натяжения шнура T2 |
, реакция опоры N , сила трения |
Fтр, си- |
||
|
|
|||||
а - ? |
|
ла тяжести m2 gr. Второй закон Ньютона для каждого тела в |
||||
Y |
ar |
2 |
r
r
T
|
r |
|
|
F |
α |
|
|
|
α |
|
r |
Рис. 1.5
Х |
векторной форме: |
r |
|
|
||||
r |
r |
|
r |
|
|
|
||
a1 |
m1 g+ T1 |
= m1 a1 |
, |
|
||||
T |
r |
|||||||
r |
r |
r |
|
r |
||||
r |
m2 g+ T2 + Fтр+ N = m2 a2 , |
|||||||
|
||||||||
|
в проекциях на оси X и Y с учётом того, |
|||||||
|
что T1 = T2 |
= T и a1 = a2 = a , |
(1) |
|||||
Х |
m1 g−T = m1 a , |
|
|
|||||
|
|
|
|
|
|
|
||
r |
|
|
|
|
|
|
|
|

6 |
|
− m2 g sinα + T− Fтр = m2 a , |
(2) |
− m2 g cos α+ N = 0. |
(3) |
Сила трения Fтр = µ N или, принимая во внимание уравнение (3):
|
|
Fтр = µ m2 g cos α. |
|
|
|
|
(4) |
|||
Подставим уравнение (4) в уравнение (2): |
|
|
|
|
|
|||||
|
− m2 g sin α+T−µ m2 g cosα = m2 a |
|
|
(5) |
||||||
Выразим силу натяжения T из уравнения (1) и (5) и приравняем |
||||||||||
полученные выражения: |
m1 g− m1 a = m2 a+ m2 g sin α+µ m2 g cos α |
|||||||||
Находим ускорение |
a = |
m1 g− m2 g sin α−µ m2 g cos α |
. |
|
||||||
|
|
|
||||||||
Произведём вычисления: |
m1+ m2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
||||
|
2,5 кг− 2кг sin 30o −0,1 |
2 кг cos30o |
м |
|
|
м |
|
|||
a = |
|
|
|
|
10 |
|
= 3,0 |
|
|
. |
2,5 кг+ 2 кг |
|
с2 |
с2 |
|||||||
|
|
|
|
|
||||||
ПРИМЕЧАНИЯ 1.2:
1.Решение задач 1.11-1.13, 1.16, 1.19 не вызовет затруднений, если дополнительно воспользоваться формулами из таблицыr .
2.В задачах 1.11, 1.13 учтитеr, что импульсом Pтелаrназываютr произведение массы m на скорость Vдвижения этого тела: P = m V. В проекции на ось Х: Px = m Vx
3.Задачи 1.21-1.30 на тему «Законы сохранения импульса
имеханической энергии» [1, §9-15]; [2, §5.1, 5.2]; [3, §2].
•Закон сохранения импульса: суммарный импульс замкнутой системы тел (когда извне не действуют другие тела) остаётся постоянным
|
r |
n r |
n |
r |
|
P = ∑Pi = ∑miVi = const , |
|||
r |
r |
i=1 |
i=1 |
|
где Pi = miVi - импульс i –го тела. |
|
|||
•Закон сохранения механической энергии: полная механическая энергия тела Е системы тел, в которой действуют только консерватив-
ные силы, есть величина постоянная
E = T+ П,
где T = m2V2 - кинетическая энергия тела, движущегося поступатель-
но со скоростью V; П = m g h - потенциальная энергия тела, поднятого

7
вблизи поверхности Земли на высоту h относительно нулевого уровня.
•Законы сохранения импульса и механической энергии применяются для определения скоростей при абсолютно упругом ударе тел (за-
дачи 1.25-1.27, 1.30) |
r |
|
|
r |
|
r |
|
|
r |
|
|
|
|
m1 V1+ m2 V2 |
= m1 U1+ m2 |
U2 , |
|||||||||
|
m V2 |
|
m |
V2 |
|
m U2 |
|
m |
2 |
U2 |
||
|
|
1 1 |
+ |
|
2 2 |
= |
1 1 |
+ |
|
2 |
. |
|
|
|
2 |
|
2 |
2 |
|
2 |
|||||
|
|
|
|
|
|
|
|
|||||
Потенциальная энергия тел до и после взаимодействия не изменяется. Совместное решение этих уравнений позволяет получить формулы для
скоростей U1 |
и U2 абсолютно упругих шаров после удара: |
|||||||
U |
= |
V1 |
(m1− m2 )+ 2 m2 V2 |
, U |
2 |
= |
V2 (m2 − m1 )+ 2 m1 V1 |
. |
|
|
|
||||||
1 |
|
|
m1+ m2 |
|
m1+ m2 |
|||
|
|
|
|
|
||||
•При абсолютно неупругом ударе (задачи 1.21-1.24, 1.28, 1.29) вы-
полняется только закон сохраненияr r импульса: r
m1 V1+ m2 V2 = (m1+ m2 ) U,
а закон сохранения механической энергии не выполняется, так как часть её расходуется на совершение работы деформации Адеф (выделяется в виде тепла Q):
|
m V2 |
|
m |
2 |
V2 |
(m |
+ m |
2 |
) U2 |
|
|
m |
2 |
|
U2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
1 1 |
|
+ |
|
2 |
= |
1 |
|
|
+ |
|
|
|
|
|
|
2 |
|
+ Адеф |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
2 |
|
|
2 |
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
ПРИМЕР 1.3. Два свинцовых шара |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
массами m1 = 1 кг и m2 |
=3 кг подвешены |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
α |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l |
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
на одинаковых нитях |
длиной l |
= 1 м. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
l− h |
|
|
|
|||||||||||||||||||||||||||||||||||||||
Нить с меньшим шаром отклонили на угол |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
α = 60° от вертикали и отпустили (рис. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
r r |
m2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
I |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
1.6). Считая удар центральным и неупру- |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h |
|
|
|
|
|
|
|
|
|||||||||||||||||||||
гим, определить энергию, израсходован- |
X |
|
|
U V1 |
|
|
|
|
|
|
II |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
h = 0 |
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
ную на деформацию шаров при ударе. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 1.6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Дано: |
|
|
|
|
|
|
|
|
|
|
|
РЕШЕНИЕ. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
m1 = 1 кг |
|
При абсолютно неупругом ударе выполняется только закон |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
m2 = 3 кг |
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
r |
|
|
= (m + m |
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
сохранения импульса: m V + m |
|
|
V |
|
|
) U, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
l = 1 м. |
|
r |
|
|
|
|
|
|
|
1 |
1 |
|
2 2 |
|
|
|
|
|
1 |
r |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
где V - скорость первого шара до удара; |
V |
|
|
|
= 0 - скорость |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
α = 60° |
|
|
|
1 |
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Wдеф - ? |
|
второго шара до удара; U- общая скорость шаров после удара. |
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
Проектируем уравнение (1) на ось Х: m1 V1 = (m1+ m2 ) U .

8
Скорость первого шара до удара V1 определим из закона сохранения механической энергии. Для системы «шар – Земля» действуют только консервативные силы (сила тяжести, сила упругости). Силой сопротивления среды пренебрегаем. В начальном положении I полная механическая энергия равна потенциальной m1gh (отсчёт высоты ведётся от уровня h = 0, соответствующего положению равновесия шаров). В положении II перед ударом шаров полная механическая энергия системы равна кинетической энергии шара. Следовательно:
m1 g h = m12V12 .
Откуда скорость первого шара до удара V1 = 2g h . Высоту h определяем из тригонометрического соотношения
l − h = l cos α, тогда V1 =  2g l (1−cos α) .
2g l (1−cos α) .
Общая скорость шаров после неупругого удара:
U = |
m1 V1 |
|
= |
m1 |
|
2g l (1−cos α) . |
|
m + m |
2 |
m + m |
2 |
||||
|
|
|
|||||
|
1 |
|
1 |
|
Энергия деформации при неупругом ударе Wдеф определяется разностью кинетических энергий шаров ТI и ТII до и после удара:
|
|
|
|
|
|
|
|
|
m V2 |
= m g l (1−cos α) |
|
|
|
||||||||||||
|
|
|
|
|
|
|
T |
= |
1 |
1 |
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
I |
2 |
|
1 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
m12 |
|
|
|
|
|
|
|
|
|
||||
|
|
|
T |
|
= |
m1+ m2 |
|
U2 |
= |
|
|
g l(1−cos α) |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
II |
|
|
|
2 |
|
|
|
|
|
m1+ m2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
Следовательно: |
|
|
|
m1 m2 g l (1− cos α) |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
m1 |
|
|
|
|
||||||
W |
= T |
− T |
= m g l (1− cos α) 1 |
− |
|
|
= |
. |
|||||||||||||||||
|
|
|
|||||||||||||||||||||||
деф |
I |
II |
|
|
1 |
|
|
|
|
|
|
|
m |
+ m |
2 |
|
|
m |
+ m |
2 |
|
||||
|
Произведём вычисления: |
|
|
1 |
|
|
|
1 |
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
W |
|
= |
1кг 3кг 10м/с2 1м (1−cos 60o)= 3,75 Дж. |
|
|
||||||||||||||||||
|
|
деф |
|
|
|
|
|
|
|
1кг+3кг |
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
ПРИМЕЧАНИЯ 1.3:
1. Закон сохранения импульса применяется для системы «пуляшар» (задачи 1.21, 1.28) и системы двух шаров (задача 1.22), а закон сохранения механической энергии для системы «шар с пулей – Земля»
(задачи 1.21, 1.28) и «шар – Земля» (задача 1.22).
9
2. При решении задачи 1.23 дополнительно учтите, что кинетическая энергия тележки с человеком расходуется на работу против сил трения:
T = Aтр = Fтр S .
3. В задачахr 1.25, 1.26 rучтите,rчто до взаимодействия снаряд и орудие покоятся P0 = 0 = m1 V1+ m2 V2 .
4. Задачи 1.31-1.40 на тему «Расчёт моментов инерции различных тел» [1, §16]; [2, §4.3]; [3, §3].
•Момент инерции твёрдого тела или системы материальных точек относительно оси вращения существенно зависит от характера распределения массы относительно этой оси.
•При дискретном распределении массы (задача 1.32) момент инер-
ции системы относительно оси вращения определяется суммой моментов инерции Ii материальных точек массой mi , находящихся на расстоянии ri от оси:
n |
n |
|
I = ∑Ii = ∑mi ri2 |
(1) |
|
i=1 |
i=1 |
|
•При равномерном распределении массы твёрдого тела момент его инерции относительно оси вращения определяется формулой
I = ∫r2 d m, |
(2) |
m |
|
где r – расстояние от элемента до оси вращения; dm – масса бесконечно малого элемента, на которые мысленно разбивается тело.
•Распределение массы по длине стержня (проволоки) характеризуется линейной плотностью τ (задачи 1.31, 1.33, 1.37-1-40):
τ = |
d m |
, |
[τ]= |
кг |
. |
(3) |
d l |
|
|||||
|
|
|
м |
|
||
•Распределение массы пластины (диска) характеризуется поверхностной плотностью σ (задачи 1.34 - 1.36):
σ = |
d m |
, |
[σ]= |
кг |
. |
(4) |
d S |
|
|||||
|
|
|
м2 |
|
||
Применяя формулы (2) и (3) для расчётов моментов инерции тел с линейным распределением массы, учтите расположение стержня относительно оси вращения.