

ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
УДК 621.9.022
Рогов В.А., Соловьев В.В.
РУДН, Москва, Россия
ДИНАМИЧЕСКАЯ МОДЕЛЬ РЕЖУЩЕГО УЗЛА РЕЗЦА С ДЕМПФИРОВАНИЕМ
The dynamic model of the cutting unit of a cutter with decrement is considered and also influence of conditions of basing of a cutting plate with decrement on dynamic characteristics of a cutter.
Введение
Впроцессе резания сила резания может меняться с очень высокой частотой. При снятии равномерного припуска это вызвано неоднородностью обрабатываемого материала, которая составляет до 65% и колебаниями упругой системы станка. При снятии неравномерного припуска к вышеперечисленным факторам прибавляется периодическое набегание на режущую кромку переменного слоя металла.
Эти факторы приводят к сколам и выкрашиванию режущей кромки, появлению микротрещин. Наиболее опасным для режущей кромки являются обработка сварных швов и отливок по корке. В этом случае стойкость режущих пластин резко снижается, а сам процесс обработки из-за непредсказуемости поддается автоматизации с невысокой степенью надежности.
Всовременных классических конструкциях токарных резцов и фрез большое внимание уделяется жесткости державок и механизмов крепления пластин. Поскольку все элементы конструкции резца выполнены из закаленной стали, то державка представляет собой аккумулятор колебаний, который практически поддерживает колебания возмущающей силы (в данном примере силы резания), что ведет к снижению качества обработки и увеличению шероховатости.
Внастоящее время с повышением требований по производительности обработки значительно возросли частоты вращения исполнительных органов станков. При этом узел крепления режущей пластины теряет жесткость и она также, совершая высокочастотные колебания, может перемещаться в гнезде. Это снижает качество обработки и ведет к преждевременному износу режущей пластины. Поскольку две плоские поверхности теоретически имеют только три точки контакта, то при повороте пластины или установке каждой новой пластины положение этих опорных точек теоретически не определено. Под действием вибраций и силы резания положение пластины неустойчиво и она может колебаться относительно своего положения равновесия.
Для повышения устойчивости режущей пластины в гнезде целесообразно между ней и подкладкой проложить демпфирующую прокладку из
177
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
пластичного материала (медь, свинец), которая бы заполнила полости между контактирующими поверхностями и выполняла бы роль динамического демпфера, то есть, повышение стабильности базирования режущей пластины под влиянием скачкообразно изменяющейся силы резания можно достигнуть за счет упругого перемещения ее в ограниченных пределах.
Влияние условий базирования режущей пластины с демпфированием на динамические характеристики резца
Для двухмассовой системы с двумя степенями свободы уравнение движения будет иметь следующий вид:
M " +(c + c) y |
= cy |
2 |
= Psinωt; |
|||
1 |
1 |
|
1 |
|
|
|
my" |
+ c( y |
2 |
− y ) = 0; |
(1) |
||
2 |
|
1 |
|
|
|
|
где: M-масса режущей пластины; m-масса подкладки; c1-жесткость стыка между подкладкой и державкой; y1,y2-координаты отклонения ре-
жущей пластины и подкладки под действием силы резания. |
|
Вынужденные колебания данной системы: |
|
Y1=А1sinwt; |
(2) |
Y2=A2sinwt. |
|
После подстановки (2) в(1) получаем: |
|
A1(-Mw2+c1+c)-cA2=P |
|
- cA1+A2(-mw2+c)=0. |
(3) |
Обозначим:
m/M=µ-отношение массы подкладки к массе режущей пласти-
ны;
P/C=ycm-статическая деформация основной системы;
 C / M =Ω -собственная частота основной системы;
C / M =Ω -собственная частота основной системы;
 с/ m =w0 –собственная частота подкладки. Подставляя принятые обозначения в (3) получим:
с/ m =w0 –собственная частота подкладки. Подставляя принятые обозначения в (3) получим:
A1(1+c/C-w2/Ω2)=ycm
A1=A2(1-w2/w02). (4)
Решая систему относительно А1 и А2 получим:
А1
ycm
|
|
|
1 |
− |
|
w2 |
|
|
|
|
|
|
|
|
|
|
|
w2 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|||
= |
|
|
|
|
|
|
0 |
|
|
|
|
|
; |
(1 − |
w2 |
)(1 + |
|
c |
− |
w2 |
) − |
c |
|
||||
|
w02 |
C |
w02 |
C |
|||||||||
|
|
|
|
|
|
|
|||||||
A2 |
= − |
|
|
|
1 |
|
|
|
|
. |
(5) |
||
ycm |
|
w2 |
|
|
c |
|
w2 |
|
|
||||
|
(1 − |
)(1 + |
|
− |
) − |
c |
|
|
|||||
|
|
w2 |
|
C |
Ω2 |
C |
|
||||||
|
|
|
|
|
|
|
|
||||||
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
178
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
Из выражения 5 следует, что при w=w0 амплитуда А1 массы М основной системы равна нулю. Поэтому при частоте изменения силы резания равной собственной частоте системы подкладка-стык, основная система находится в состоянии покоя.
Из второго уравнения (5) следует, что A2=- Pc . Движение массы под-
кладки осуществляется по закону: y2= Pc sinwt , и тогда сила упругости
стыка между подкладкой и державкой меняется по закону: -P sinwt.
Эта сила в любой момент времени равна силе резания, но противоположна ей по знаку. Полученные зависимости справедливы при любом
соотношении Ωw . Эффект демпфирования наиболее выражен тогда, когда основная система находится в зоне резонанса с возмущающей силой (си-
лой резания). В этом случае рассмотрим условие w0= Ω или |
c |
= |
m |
= µ . |
||||||||||||||||||||
C |
M |
|||||||||||||||||||||||
Система (5) будет иметь вид: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
w2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
1 − |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
А |
|
|
|
|
|
|
w2 |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
1 |
|
= |
|
|
|
|
|
0 |
|
|
|
|
; |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
ycm |
(1 |
− |
w2 |
)(1 + µ − |
w2 |
|
) − µ |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
w2 |
w2 |
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
A2 |
|
|
|
|
|
|
0 |
1 |
|
0 |
|
|
|
|
|
|
|
|
|
|
|||
|
|
= − |
|
|
|
|
|
|
|
; |
|
|
|
|
|
(6) |
||||||||
|
ycm |
|
|
|
w2 |
|
|
|
w2 |
|
|
|
|
|
|
|||||||||
|
|
|
(1 |
− |
|
)(1 + µ − |
|
) − µ |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
w2 |
Ω2 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Знаменатели этих выражений содержат члены |
w2 |
, которые могут |
||||||||||||||||||||||
w2 |
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
обращать знаменатель в нуль, при этом амплитуды колебаний будут равны бесконечности и наступит явление резонанса. Частота возмущающей силы будет равна собственной частоте всей системы.
Собственные частоты определяются из уравнения:
(1− |
w2 |
)(1+ µ − |
w2 |
) − µ = 0. |
(7) |
|||||||||
w2 |
w2 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
0 |
|
|
|
|
0 |
|
|
|
|
|
( |
w |
) |
2 |
= (1 |
+ |
µ |
) |
± |
µ + |
µ2 |
. |
(8) |
||
w |
|
2 |
4 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Когда собственная частота возмущающей силы совпадает с собственной частотой системы подкладка-стык, то колебания основной системы
179
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
равны нулю. При частотах возмущающей силы согласно уравнению (8) имеет место резонанс. Характеристики подкладки эффективны для определенной частоты возмущающей силы. Для того чтобы подкладка работала в широком диапазоне частот, между ней и режущей пластиной необходимо установить амортизатор. В этом случае уравнения движения системы будут иметь следующий вид:
My1”+ Cy1 – c(y2-y1)=P sinwt+ k(y2’-y1’),
My2” + c(y2 –y1)=k(y1’-y2’). (9)
Коэффициент k определяется из условия затухания колебаний: если k стремится к нулю, то вся система работает без затухания; если k стремится к бесконечности, то существует его определенное значение, при котором амплитуда вынужденных колебаний стремится к минимуму. Обозначим:
f= wΩ0 ; g= Ωw ; kc=2mΩ.
В принятых обозначениях амплитуда колебаний режущей пластины будет определяться из выражения:
|
|
|
|
|
|
|
|
(2 |
|
k |
− g)2 (g 2 − f 2 )2 |
|
|
|
|
|
|
|
|
|||||||
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
= |
|
k |
|
|
|
|
|
|
kc |
|
|
|
|
|
|
|
|
|
|
|
|
. |
(10) |
|||
ycm |
(2 |
− g) |
2 |
(g |
2 |
− g |
2 |
µ) |
2 |
+[ f |
2 |
g |
2 |
µ − (g |
2 |
−1)(g |
2 |
− f |
2 |
)] |
2 |
|
||||
|
|
kc |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Из уравнения следует, что отношение отклонений
пластины зависит от нескольких величин: µ , g, k . kc
Выводы
y1 режущей
ycm
В качестве амортизатора может быть использована фольга из мягкого материала. При небольших режимах резания с выделением незначительного количества тепла это может быть свинцовая фольга, при более интенсивном резании - медная или алюминиевая, а также фольга из вспененных металлов.
Наибольший интерес для современных конструкций резцов представляют комбинированные подкладки, выполненные с использованием композиционных материалов и металлической матрицы, обеспечивающей хороший теплоотвод.
Литература
1Ландау Л.Д. и Лифшиц Е.М. Теория упругости. М, Наука, 1965.-202 с.
2Силкин Е.И. Статическая и динамическая прочность машин. М, УДН, 1969.-
323 с.
180
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
УДК 621.9.024
Покинтелица Н.И., Клименко Ю.В., Ковалев Ю.Г.
ВУНУ им. В. Даля, г. Луганск, Украина
МЕТОДИКА ОПРЕДЕЛЕНИЯ НАПРЯЖЕНИЙ, ВОЗНИКАЮЩИХ В ПИЛЕ ТРЕНИЯ
ПРИ ЭЛЕКТРОФРИКЦИОННОЙ РАЗРЕЗКЕ МЕТАЛЛОВ
The technique of definition of voltages originating in a saw of abrasion and caused as by external loadings from process of cutting, and internal, connected with rotation and effect of centrifugal forces is resulted. The mathematical decision of a delivered task is circumscribed. Is graphically shown picture of efforts of abrasion, originating in a saw.
Введение
Развитие новых, более технологичных способов, схем и инструментов для обработки металлов резанием, ставит перед исследователями задачу всесторонней их проверки. Одним из таких аспектов является проверка инструмента на предмет сохранения им целостности или расчет на прочность.
В последние годы в арсенале технологов появился способ электрофрикционной разрезки металла пилами трения [1]. Проведенные исследования позволили создать математические модели энергосиловых и тепловых процессов, происходящих с инструментом [2], был изучен процесс стружкообразования, а так же рассмотрены вопросы, связанные со стойкостью пилы трения. Однако, вопросу сохранения инструментом его целостности не было уделено внимание.
Изучение напряжений, возникающих в пиле трения и вызванных как внешними нагрузками (силами) от процесса резания, так и внутренними, связанными с вращением и воздействием центробежных сил, позволяет дать ответ на поставленный вопрос.
Основная часть
Как известно, пила трения представляет собой тонкий, стальной диск, быстровращающийся вокруг собственной оси. В процессе резания на диск действуют внешние нагрузки (силы резания) и внутренние, объемные нагрузки, обусловленные центробежными силами. В общем случае, такая схема нагружения может быть применена к любому тонкому, быстровращающемуся диску и рассмотрение возникающих в нем напряжений будет
181
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
аналогично рассмотрению напряжений в пиле трения.
К вопросу изучения напряжений, возникающих во вращающихся дисках в своих работах обращались И.В.Демьянушкин и И.А.Биргер [3]. Из их исследований известно, что равномерно нагретые по толщине, симметричные относительно плоской серединной поверхности диски достаточно рассчитывать только на растяжение. Напряженное состояние в диске считается двухмерным и осесимметричным (напряжениями в площадках, параллельных серединной поверхности, пренебрегают). Напряжения равномерно распределены по толщине. Принятые гипотезы о напряженном состоянии упрощают расчет, но вместе с тем вносят некоторые погрешности в его результаты. Эти погрешности тем меньше, чем меньше толщина диска по сравнению с его диаметром и чем плавне она меняется в зависимости от радиуса.
Принятые допущения полностью соответствуют схеме нагружения пилы трения при электрофрикционной разрезке металлов, и не будут вносить существенных погрешностей в результаты расчета напряжений в ней.
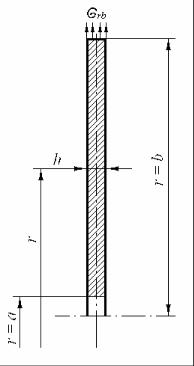
На рис. 1 показана схема нагружения пилы трения, которая принимается за расчетную.
Рисунок 1 — Схема нагружения пилы трения
Как известно из исследований [3], основное дифференциальное уравнение растяжения диска в перемещениях имеет вид:
182
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
d 2u |
d |
|
|
|
rhE |
|
|
du |
|
|
µ d |
|
rhE |
|
|
|
|
d µ |
|
1 |
|
|
|
||||||||
|
2 + |
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
|
|
+ |
|
− |
|
|
u = f (r), |
|||||
dr |
dr |
ln |
− µ |
2 |
dr |
|
|
|
|
ln |
1 − µ |
2 |
|
|
r |
2 |
|||||||||||||||
|
|
1 |
|
|
|
|
|
|
r dr |
|
|
|
|
|
dr r |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
f (r)= (1 + µ)αT |
d |
|
|
|
rhE |
|
|
|
|
d |
[(1 + µ)αT ]− |
(1 + µ)αT |
|
|
|
|
1 − µ2 |
|
|||||||||||||
|
|
ln |
|
|
|
|
|
|
|
+ |
|
|
|
|
|
− q |
r |
|
. |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
dr |
|
|
1 − µ |
2 |
|
dr |
|
|
|
|
|
|
|
|
r |
|
|
|
E |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Применительно к дисковой пиле трения, используемой для электрофрикционной разрезки металла, которая имеет постоянную толщину и постоянные параметры упругости ( E = const, µ = const, h = const ) уравнение примет вид линейного неоднородного дифференциального уравнения 2-го порядка с переменными коэффициентами:
|
d 2u |
+ |
1 |
|
du |
− |
1 |
u = (1 |
+ µ) |
d(αT ) |
|
− qr |
1 − µ2 |
. |
(1) |
||||||
|
dr2 |
r dr |
|
|
|
|
|||||||||||||||
|
|
|
r2 |
|
|
dr |
|
|
|
|
|
E |
|
||||||||
Решение однородного уравнения имеет вид: |
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
uo (r)= K1r + K2 |
1 |
, |
|
|
|
|
(2) |
||||||||
|
|
|
|
|
|
|
r |
|
|
|
|
||||||||||
где K1 , K2 − произвольные константы. |
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||
Тогда общее решение неоднородного уравнения имеет вид: |
|
||||||||||||||||||||
|
|
|
|
|
|
u(r)= K u |
1 |
(r)+ K |
2 |
u |
2 |
(r)+ u* (r), |
(3) |
||||||||
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|||||||
где u* (r) – частное решение, которое может быть найдено методом вариации произвольных постоянных.
По этому методу частное решение ищется в виде (2). При этом K1 = K1(r), K2 = K2 (r) – искомые функции:
′ |
|
′ |
(r)u2 |
(r)=0; |
|
|
|||
K1 |
(r)u1(r)+ K2 |
|
|
(4) |
|||||
′ |
′ |
(r)+ K2 |
′ |
|
′ |
|
|
||
|
|
|
|
||||||
K1 |
(r)u1 |
|
|
(r)u2 |
(r)= f (r). |
|
|||
Ввиду линейной независимости решений u1(r)= r и u2 (r)=1 r она
r она
может быть разрешена относительно K1′(r), K2′(r). Интегрируя, найдем K1(r), K2 (r) и, подставляя в частное решение, получим решение уравнения (1), которое после нахождения функций
F1 (r)= F1ω (r)+ F1T (r), F2 (r)= F2ω (r)+ F2T (r) примет вид:
u(r)= |
K |
1 |
− |
1 − µ r q |
dr |
r + |
K |
2 |
+ 1 − µ2 r q |
r2dr + (1 + µ)r |
αTrdr |
|
1 . |
||||
|
|
|
2E |
∫ |
r |
|
|
|
2E |
∫ |
r |
∫ |
|
|
|
||
|
|
|
|
a |
|
|
|
|
|
a |
|
a |
|
r |
|||
|
|
|
|
|
|
|
|
|
|
|
183 |
|
|
|
|
|
|
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
Подставляя функцию u(r) и ее производную в уравнение окружных
σθ и радиальных σr |
напряжений, и произведя некоторые вычисления для |
||||||||||||||||||
упрощения получим: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
* |
|
|
E |
b |
1 |
|
1 − µ |
b |
|
|
b |
|
|
|||
* |
|
K2 |
|
|
|
|
|
2 |
|
|
|
|
|||||||
σrb =σr (b)= K1 |
− |
|
|
|
|
2 |
∫αTrdr − |
|
|
2 |
∫qr r |
|
dr + (1 |
|
, |
||||
b |
2 − |
b |
2 |
|
b |
|
+ µ)∫qr dr |
||||||||||||
|
|
|
|
|
|
a |
|
|
a |
|
|
a |
|
|
|||||
σra =σr (a)= K1* − |
|
K*2 |
|
= 0 . |
|
|
|
|
|
|
|
|
|
|
|||||
|
a2 |
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Откуда получаем:
|
* |
|
K* |
|
|
|
|
2 |
|
2 |
|
|
|
|
b |
|
|
|
|
|
K |
1 |
= |
|
2 |
* |
= |
|
a |
b |
|
|
|
E |
∫αTrdr + |
1 |
|
1 − µ |
|||
|
2 |
|
|
|
||||||||||||||||
|
|
2 |
|
|
|
2 |
|
2 |
|
|
2 |
|||||||||
|
|
a |
, K2 |
b |
− a |
|
2 |
|
b |
|||||||||||
|
|
|
|
|
|
|
|
b |
|
a |
|
|
||||||||
b |
2 |
b |
|
|
∫qr r |
|
|
+σrb . |
|
|
dr + (1 + µ)∫qr dr |
|||
a |
|
a |
|
|
С учетом действия объемной нагрузки константы интегрирования примут вид:
K*2 |
=σrb |
|
a2b2 |
+ |
|
Ea2b2 |
θ |
(b)+ |
1 − µ |
a2 ρω2 (b2 |
+ a2 )+ a2b2 ρω2 |
1 + µ |
|||||||
b |
2 − a2 |
b2 − a2 |
|
|
|||||||||||||||
|
|
|
|
|
, |
|
8 |
|
|
|
|
4 |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
K1* =σrb |
|
b2 |
|
|
+ |
Eb2 |
|
|
θ(b)+ |
1 − µ |
ρω2 (b2 |
+ a2 )+ |
1 + µ |
ρω2b2 . |
|||||
|
b2 − a2 |
b2 − a2 |
|
8 |
|
4 |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Учитывая найденные константы интегрирования окончательно полу-
чаем:
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
a2 |
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
|
a2 |
|
|
|
|||||||
σ |
r |
(r)= |
σ |
rb |
|
|
|
|
|
|
1 |
− |
|
|
|
|
+ |
E θ(b) |
|
|
|
|
|
|
|
|
|
1 − |
|
|
|
|
|
−θ(r) |
+ |
|
|||||||
|
|
2 |
|
|
|
|
2 |
|
|
2 |
|
|
2 |
|
|
|
2 |
|
|||||||||||||||||||||||||
|
|
|
|
b |
− a |
2 |
|
|
|
r |
|
|
|
|
|
|
|
|
b |
− a |
|
|
|
|
r |
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, |
|
|||||||||
|
3 + µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2b2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
+ |
|
|
|
ρω |
2 b2 + a2 − r2 − |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
a2 |
|
|
|
|
|
|
|
|
b2 |
|
|
|
|
|
|
a2 |
|
|
|
|||||||||
σ |
θ |
(r)=σ |
rb |
|
|
|
|
|
|
1 |
+ |
|
|
|
|
|
+ |
E θ(b) |
|
|
|
|
|
|
|
|
1 |
+ |
|
|
|
|
+θ(r)− |
αT |
+ |
||||||||
|
|
2 |
|
|
|
|
2 |
|
|
2 |
|
2 |
|
|
2 |
|
|||||||||||||||||||||||||||
|
|
|
|
b |
− a |
2 |
|
|
|
r |
|
|
|
|
|
|
b |
− a |
|
|
|
|
r |
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
3 + µ |
|
|
|
|
|
|
|
|
|
a2b2 |
|
|
1 + 3µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
+ |
|
|
|
ρω |
2 b2 + a2 + |
|
|
|
|
|
− |
|
|
|
|
r |
2 . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
8 |
|
|
|
|
|
|
|
|
|
|
r |
|
|
|
3 + µ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
На рис.2 в относительных координатах показаны эпюры напряжений в диске постоянной толщины с центральным отверстием радиуса r = a . Штриховыми линиями показаны напряжения σrT и σθT от распределенной по радиусу температуры, штрихпунктирными линиями показаны на-
184