

DM_1 / Деталі машин КЛ [Стадник В. А
.].pdfF |
= F sinδ |
1 |
; |
|
F |
= F sin |
δ |
2 |
. |
(8.19) |
||||
a1 |
|
r |
|
|
|
|
a1 |
|
r |
|
|
|
||
Оскільки δ 1 < δ 2 , то Fa1 |
< Fa2 , тобто натискний пристрій у конічній передачі |
|||||||||||||
доцільно розміщувати з боку меншого котка, для якого |
|
|||||||||||||
F |
= |
KFt sinδ 1 |
= |
|
2 KT1 |
sinδ |
1 |
. |
|
(8.20) |
||||
|
|
|
||||||||||||
a |
1 |
|
f |
|
|
|
|
f × dm1 |
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
||||
8.11. Види руйнування робочих поверхонь фрикційних котків
В залежності від умови роботи передачі на практиці мають місце такі види руйнування робочих поверхонь котків:
1.Утомне викришування робочих поверхонь (пітинг) зустрічається в закритих передачах при надійному змащуванні і захищених від попадання абразивних частинок.
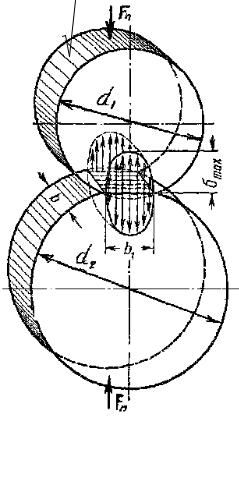
Рис. 8.9. Схема руйнування робочих циліндричних поверхонь котків при роботі в присутності мастила
Притискна сила викликає у місці контакту високі контактні напруження
σ(рис. 8.9, г), які під час роботи циклічно змінюються за нульовим
H
циклом внаслідок переміщення контакту по ободу. Циклічна дія
контактних напружень сприяє розвитку втомних мікротріщин на
робочих поверхнях. При русі з тертям у поверхневому шарі котка створюються похилі мікротріщини, які при ковзанні розташовуються не
140
радіально, а витягуються в напрямку сил тертя, як показано на рис. 8.9, а.
У даному випадку ω1r1 > ω2 r2 , тобто циліндрична поверхня 1 є
випереджаючою (ведучою), а поверхня 2 відстаючою (веденою). Експериментально установлено, що при коченні з ковзанням при однакових матеріалах і твердості поверхонь 1 і 2, вони мають різний опір втомному викришуванню. Це пояснюється тим, що втомні мікротріщини випереджаючих і відстаючих поверхонь по-різному підходять і відходять з зони контакту. Мікротріщини випереджаючих поверхонь підходять в зону контакту своїми вершинами, олива, яка проникла в тріщину, витискається з неї (рис. 8.9, б), а тріщина закривається. Випереджаючі поверхні як би "заліковують свої рани". Мікротріщини відстаючих поверхонь 2 підходять в зону контакту своїми устями. При наявності високого тиску в зоні контакту в устя тріщин "запресовуються" додаткові порції оливи, що сприяє збільшенню тріщини і не сприяє її "заліковуванню".
В результаті багатоциклового навантаження мікротріщин наступає період значного розширення і поглиблення тріщин. З ультрамікроскопічних тріщини збільшуються до мікро, а потім і до макроскопічних розмірів. Стінку тріщини уже можна розглядати як консольну балочку (уподібнену лусці на рибі). Число циклів навантаження в процесі роботи зростає і наступає момент (рис. 8.9, в), коли ця балочка ("луска") ломається. Відокремлені частки металу попадають в оливу, а на місці відокремленої частки виникає ямка (раковина) втомного викришування. Робоча поверхня втрачає свою геометричну форму, появляється шум, стук. Передача виходить із ладу.
Таке явище отримало назву пітинг від англійського слова "pitting" (точкове викришування, утворення поверхневих раковин). Чи відбувається пітинг на випереджаючих поверхнях? Так, але в значно меншій мірі.
141
Зауважимо, що тут описано лише механічну сторону цього явища. Насправді явище пітингу до сьогоднішнього дня повністю не розкрито. Воно носить складну механо-фізико-хімічну природу, починаючи з утворення мікротріщин і з заповнення їх молекулами поверхневоактивних речовин за рахунок хімічної і фізичної адсорбцій і ефекта академіка Ребіндера, який полягає у зменшенні міцності поверхневих шарів матеріалів під дією поверхнево-активних компонентів рідкого мастила (оливи).
Розуміння і засвоєння природи описаних вище явищ є дуже важливими у практичній діяльності майбутніх інженерів-механіків, оскільки ці явища мають місце практично у всіх механізмах, які містять вищі кінематичні пари (фрикційні, зубчасті, черв'ячні передачі, підшипники кочення, кулачкові механізми, тощо).
2.Задирка – пошкодження робочих поверхонь фрикційних передач.
Виникає у швидкохідних важко навантажених передачах внаслідок розриву мастильної плівки на робочій поверхні котків. У місці контакту котків розвивається висока температура, мастильний плівка розривається, і котки безпосередньо дотикаються один до одного ювенільними (чистими від захисних окисних плівок) поверхнями. Як наслідок, відбувається приварювання часток метала з наступним відривом від однієї з поверхонь котків. Приварені частки задирають робочі поверхні в напрямку ковзання. Для попередження задирки застосовують спеціальні мастила.
3.Зношування – підвищений знос (спрацювання) мають відкриті передачі. Всі види руйнування робочих поверхонь котків залежать від величини контактних напружень.
8.12. Розрахунок котків на міцність
Розміри котків фрикційних передач визначають із розрахунку на обмеження зношування (спрацьовування) і на міцність.
142
Котки, виготовлені із м'яких матеріалів (пластмаса, гума, шкіра, дерево) у випадку недостатніх розмірів у процесі роботи обминаються по поверхні. Результатом є виникнення буксування передачі і прискорене її зношування. У зв'язку з цим фрикційні передачі розраховують на обмеження зношування за умови обмеження тиску q на 1 пог. мм ширини котків, причому допустимі значення цих питомих навантажень [q] установлені багатолітньою практикою експлуатації цих передач. Такий метод розрахунку фрикційних передач є спрощеним і приблизним.
Спрощений метод розрахунку фрикційних передач з гладкими циліндричними поверхнями здійснюється за формулою
|
|
Fr ≤ b[q], |
(8.21) |
||
звідки b > |
Fr |
для проектного розрахунку |
і q = |
Fr |
≤ [q] для перевірного |
|
|
||||
|
q |
|
b |
||
розрахунку, де Fr - сила притискання, Н; b – |
робоча ширина котків, мм; [q]- |
||||
допустимий тиск, Н/мм: для пластмас 40 – 80, |
для гуми 10 – 30, для шкіри 15 - |
||||
25 Н/мм. |
|
|
|
||
Розрахунок котків циліндричної фрикційної передачі на контактну міцність
Основним критерієм працездатності і розрахунку фрикційних передач з металевими котками є їх контактна міцність, яка залежить від величини контактних напружень σН .
Тиск, а отже, і нормальні напруження σН стиску у місці контактної площинки розподіляються нерівномірно, по еліпсу (рис. 8.10). У розгляданому нами частинному випадку найбільше розрахункове контактне напруження буде при початковому дотику по середній лінії контактної площинки тіл кочення і на підставі формули Герца (рис. 3.3, з) для сталевих котків з коефіцієнтом Пуассона рівним 0,3 може бути визначене за формулою
143
σ max = 0 ,418 |
q × Eзв |
|
£ [σ ] , |
(8.22) |
|
||||
|
ρзв |
|
||
|
|
|
H |
|
Рис. 8.10. Контактні напруження стиску у циліндричних котках
де q – тиск на одиницю довжини контактної лінії, Н/мм; Езв – зведений модуль пружності, МПа; ρзв – зведений радіус кривини робочих поверхонь котків, мм.
Для одержаних формул для перевірного і проектного розрахунків виконаємо деякі перетворення, зокрема виразимо зведений радіус кривини
через діаметри котків d1 і d2 або через діаметр веденого котка d2 і передатне число u:
|
1 |
|
= |
2 |
|
± |
2 |
= |
2(d2 ± d1 ) |
= |
2(u ± 1) |
, |
|
(8.23) |
|||||
|
|
|
|
|
d1 |
|
|
|
|
|
|||||||||
|
|
ρзв |
|
d2 |
d1 × d2 |
d2 |
|
||||||||||||
або ρзв |
= |
|
|
d2 |
|
|
, |
але |
a = |
d1 + d2 |
= |
d1 (u ± 1) |
, |
|
|||||
|
2(u ± 1) |
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
|
2 |
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
144 |
|
|
|
|
|
|
||

звідки d1 |
= |
2a |
|
, |
а |
d2 |
= |
2au |
. |
u ± |
1 |
|
|||||||
|
|
|
|
|
|
u ± 1 |
|||
Тоді ρзв |
= |
|
|
au |
. |
|
|
|
|
|
||||
|
(u ± |
1)2 |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
||||
Виразимо тиск q |
через крутний момент T1 на ведучому котку, міжосьову |
|||||||||||||
відстань a і ширину котка b . |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
q = |
Fr |
= |
2T1 × K |
. |
||
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
b |
|
d1 × f × b |
|
Але |
d1 = |
|
2a |
|
|
. |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
||||
(u ± |
1) |
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|||||
Тоді |
q = |
T1 × K (u ± 1) |
, |
|
|
|
||||||||
|
|
|
|
|||||||||||
|
|
|
|
a × |
f × b |
|
|
|
|
|
|
|||
де K – |
коефіцієнт запасу зчеплення. |
|||||||||||||
Підставивши значення ρзв і q у формулу (8.22), одержимо формулу для перевірного розрахунку циліндричної фрикційної передачі з зовнішнім контактом
|
|
|
|
|
|
|
|
|
|
T1 |
× K × Eзв (u + |
1)3 |
|
|
[σ ]H , |
|
|
σ = 0 ,418 |
|
|
|
£ |
(8.24) |
|||
|
a 2 × f × b × u |
|
||||||
H |
|
|
|
|
|
|||
де Eзв = 2 E1 × E2 - зведений модуль пружності матеріалів котків, МПа; Е1 і
E1 + E2
Е2 модулі пружності матеріалів, відповідно ведучого і веденого котків.
Щоб одержати формулу для проектного розрахунку циліндричної фрикційної передачі введемо у розрахунок коефіцієнт ширини котків ψ a .
ψ a = b , тоді b =ψ a × a . З досвіду проектування і експлуатації фрикційних a
передач ψ a = 0 ,2 ¸ 0 ,4 .
145

Підставивши ширину b =ψa × a в одержану вище формулу (8.24),
одержимо
|
|
|
|
|
|
||||||
|
T1 × K × Eзв (u + 1)3 |
[σ ]H , |
|
||||||||
σ = 0 ,418 |
|
|
|
|
|
|
|
£ |
(8.25) |
||
|
|
a 3 ×ψa |
|
|
|
||||||
H |
|
|
× f × u |
|
|
||||||
звідки формула для проектного розрахунку запишеться у вигляді |
|
||||||||||
|
|
|
|
|
|
|
|
||||
a = (u + 1) |
|
0 ,418 2 |
E |
зв |
×T × K |
|
|
||||
|
|
|
|
|
1 |
|
|
, мм |
|
||
|
[σ ] |
ψ × f × u |
|
||||||||
3 |
|
|
|
|
|
|
|
|
|
|
(8.26) |
|
|
|
H |
|
|
a |
|
|
|
|
|
У формули (8.25) і (8.26) підставляють значення допустимих контактних напружень [σ ]H менш міцного котка. Значення [σ ]H приймають за таблицями у довідковій літературі, модуль пружності, МПа, для сталі Е = 2 ,1 × 106 ; для чавунів Е = 1,1 × 105 .
Звичайно приймають ψa = 0 ,2...0 ,4 . Ширина більшого котка b2 ≤ d1 .
Для компенсації неточностей монтажу ширину малого котка приймають b1 = b2 + (5...10) мм.
8.13. Загальні відомості про регульовані фрикційні передачі (варіатори)
У більшості сучасних робочих машин необхідно регулювати швидкість виконуючих органів у залежності від властивостей оброблюваного об'єкту, що змінюються в процесі роботи (діаметри обточуваних деталей, діаметри паперових рулонів при намотці паперу і т. п.).
Для цього машини споряджені механічно регульованими фрикційними передачами - варіаторами, які забезпечують плавну (безступінчасту) зміну частоти обертання веденого вала при постійній частоті обертання ведучого вала. Варіатори дозволяють установити оптимальний швидкісний режим і регулювати швидкість на ходу. Варіатори виготовляють для передавання невеликих потужностей (не більше ніж 20 – 30 кВт), хоч відомі конструкції для потужностей 100 кВт і більше. Фрикційні варіатори мають застосування у приводах металота деревообробних верстатів, пресів, конвейєрів, у машинах
146
хімічної, текстильної та паперової промисловості, а також у приладобудуванні. В табл. 8.1 показані принципові схеми деяких найбільш розповсюджених варіаторів, які умовно можна розбити на дві групи:
а) з безпосереднім контактом ведучої та веденої ланок (без проміжних ланок);
б) з проміжними ланками.
147
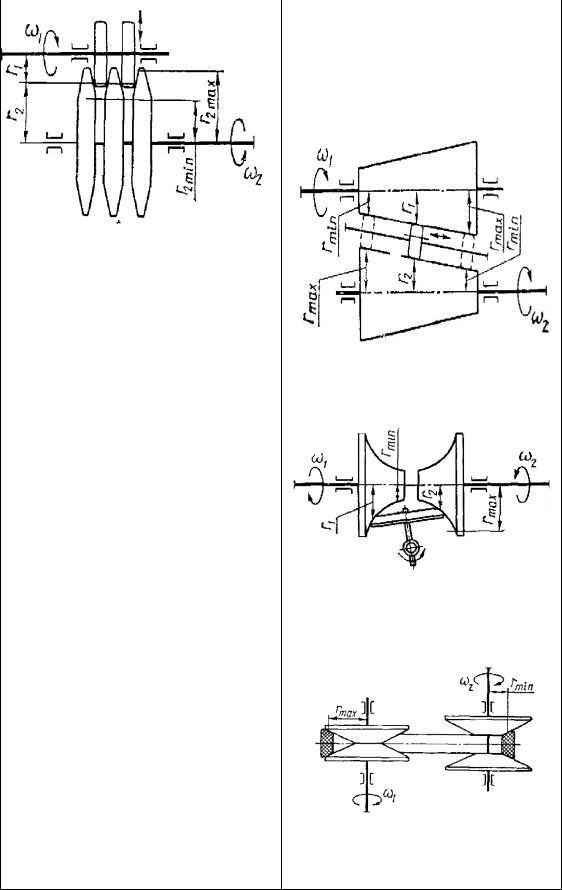
|
Таблиця 8.1. Схеми варіаторів |
|
|
Варіатори з безпосереднім |
Варіатори з проміжними |
дотиканням ведучої та веденої |
ланками |
ланок |
|
|
|
Лобовий |
Конусний із проміжним диском |
Конусний |
Торовий |
|
Дисковий |
Клинопасовий із |
розсувними конусами |
148
Діапазон регулювання варіаторів
Основною кінематичною характеристикою будь-якого варіатора є його діапазон регулювання Д, який дорівнює відношенню максимальної кутової
швидкості ω |
(n |
) веденого вала до його мінімальної кутової швидкості |
||
|
|
2 max |
|
2 max |
ω |
(n |
)при постійній швидкості ω (n )обертання ведучого вала. |
||
1min |
|
1 min |
|
1 1 |
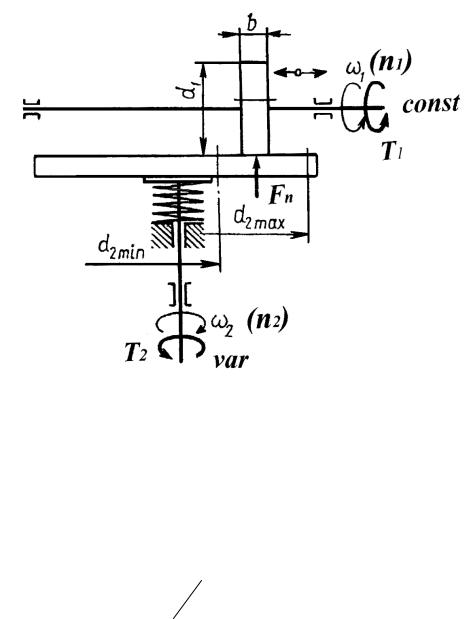
Рис. 8.11. Схема лобового варіатора На рис. 8.11 зображено схему лобового варіатора, який складається із
котків, установлених на валах з взаємноперпендикулярними осями і притиснутих один до одного силою Fn пружиною стиснення. Обертання від ведучого вала до веденого передається силою тертя. Коток 1 з'єднаний з веденим валом довгою напрямною шпонкою. При переміщенні його вздовж
шпонки змінюється відстань d2 2 від осі обертання веденого вала, внаслідок
чого змінюється передатне число u, а отже, і частота обертання n2 . Дійсно, із умови рівності колових швидкостей котків (ковзанням нехтуємо) маємо n1d1 = n2d2 ,
149