

3.1.3.Обусловленность слау
Таким образом, малые погрешности вычислений или исходных данных могут привести к существенным погрешностям в решении. Такие системы уравнений называются плохо обусловленными.
Для оценки полученного решения используют следующее соотношение:
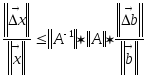
Произведение
![]() называется числом обусловленности
матрицы A и обозначается как cond(A).
называется числом обусловленности
матрицы A и обозначается как cond(A).
3.1.Метод Гаусса.
Он основан на приведении матрицы системы к треугольному виду. Это достигается последовательным исключением неизвестных из уравнений системы.
Сначала с помощью первого уравнения исключается х1 из всех последующих уравнений системы. Затем с помощью второго уравнения исключается х2 из третьего и всех последующих уравнений. Этот процесс, называемый прямым ходом метода Гаусса, продолжается до тех пор, пока в левой части последнего (n-го) уравнения не останется лишь один член с неизвестным xn, т.е. матрица системы будет приведена к треугольному виду.
Обратный ход метода Гаусса состоит в последовательном вычислении искомых неизвестных: решая последнее уравнение находят единственное неизвестное xn. Далее, используя это значение, из предыдущего уравнения вычисляют xn-1 и т.д. Последним находят значение х1 из первого уравнения.
a11x1 + a12x2 + a13x3 = b1
a21x1 + a22x2 + a23x3 = b2
a31x1 + a32x2 + a33x3 = b3
Для исключения х1 из второго уравнения прибавим к нему первое, умноженное на -а21/а11 .
a11x1 + a12x2 + a13x3 = b1
(a22-а21/а11)x2 + (a23-а21/а11)x3 = b2-(а21/а11)b1
a31x1 + a32x2 + a33x3 = b3
Затем, умножив первое уравнение на -а31/а11 и прибавив результат к третьему уравнению, исключим из него х1
a11x1 + a12x2 + a13x3 = b1
(a22-а21/а11)x2 + (a23-а21/а11)x3 = b2-(а21/а11)b1
(a32-а31/а11)x2 + (a33-а31/а11)x3 = b3-(а31/а11)b1
Общие формулы пересчета коэффициентов при этом выглядят следующим образом:
a'ij = aij - (ai1/a11)a1j (i,j = 2,3)
b'i = bi - (ai1/a11)b1 (i = 2,3)
Т.е. система имеет вид
a11x1 + a12x2 + a13x3 = b1
a'22x2 + a'23х3 = b'2
a'32x2 + a'33x3 = b'3
Теперь из третьего уравнения системы надо исключить х2. Для этого надо умножить второе уравнение на -a'32/a'22 и прибавить результат к третьему. В результате получится
a11x1 + a12x2 + a13x3 = b1
a'22x2 + a'23х3 = b'2
a''33х3 = b''3
где a''33 = a'33 - (a'32/a'22)a'23 и b''3 = b'3 - (a'32/a'22)b'2 .
Матрица полученной системы имеет треугольный вид.
В процессе исключения неизвестных приходится выполнять операции деления на коэффициенты а11, а22 и т.д. Поэтому они должны быть отличными от нуля. В противном случае необходимо соответствующим образом переставить уравнения системы. Диагональные элементы матрицы обычно называют ведущими или главными элементами.
Обратный ход начинается с решения третьего уравнения системы
x3 = b''3/a''33 .
Используя это значение, можно найти х2 из второго уравнения, а затем х1 из первого:
x2 = (b'2 - a'23x3)/a'22 ; x1 = (b1 - a12x2 - a13x3)/a11
Аналогично строится вычислительный алгоритм для линейной системы с произвольным числом уравнений. При этом расчетные формулы принимают вид:
Прямой ход метода Гаусса
 ,
,
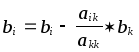 , где
, где
k=1,2,…,n-1 ; i=k+1,k+2,…,n ; j=k+1,k+2,…,n .
В этих формулах k - номер неизвестного, которое исключается из оставшихся n-k уравнений (а также номер того уравнения, с помощью которого исключается xk); i - номер уравнения, из которого исключается неизвестное xk; j - номер столбца.
Обратный ход метода Гаусса
![]()
 ;
;
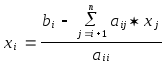 , где
i=n-1,n-2,…,1 .
, где
i=n-1,n-2,…,1 .
В этих формулах i - номер неизвестного, которое определяется из i-го уравнения; j=i+1,i+2,… - номера уже найденных неизвестных.