

6.2. Определение ускорения свободного падения с помощьюмаятника универсального. (Лабораторная работа 13)
Приборы и принадлежности: установка ФМ-13 «Маятник универсальный», секундомер.
Теория метода и описание прибора
Зная период
колебаний физического маятника
![]() ,
гдеt
– время; n
– число
колебаний, и его приведенную длину lпр,
ускорение свободного падения можно
рассчитать по формуле
,
гдеt
– время; n
– число
колебаний, и его приведенную длину lпр,
ускорение свободного падения можно
рассчитать по формуле
![]() . (6.11)
. (6.11)
Общий вид маятника универсального представлен на рис. 6.3. Основание (1) оснащено регулируемыми ножками (2), которые позволяют произвести выравнивание прибора. В основании закреплена колонка (3), на которой зафиксирован верхний кронштейн (4) и нижний кронштейн (5) с фотоэлектрическим датчиком, фиксирующим каждое прохождения маятника через него (6).
После отвинчивания воротка (11) верхний кронштейн можно поворачивать вокруг колонки. Заряжение воротка (11) фиксирует кронштейн в любом, произвольно избранном положении. С одной стороны крон-
|
Рис.
6.3 |
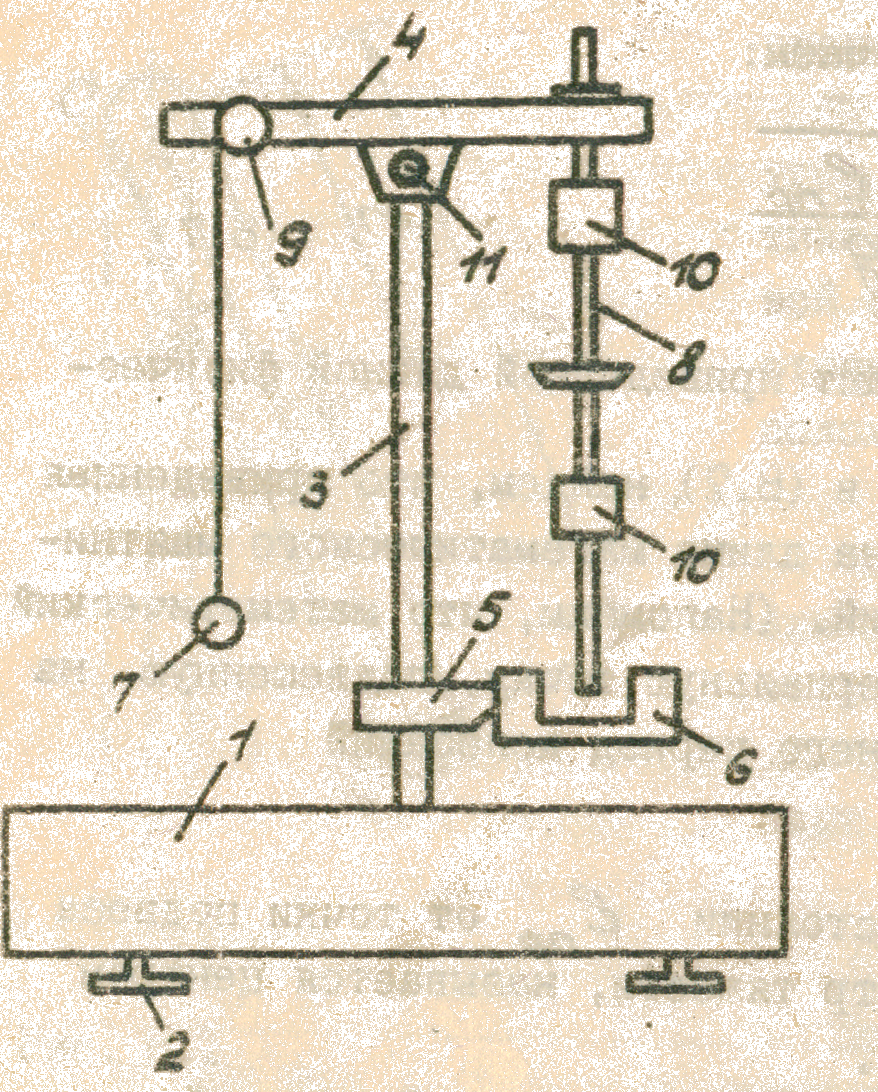
Рис. 1.4
боротный маятник выполнен в виде стального стержня, на котором фиксированы два повернутых друг к другу лезвиями ножа и два груза (10).На стержне через каждые 10 мм выполнены кольцевые нарезки, служащие для точного определения длины оборотного маятника (расстояние между ножами). Ножи и ролики можно перемещать вдоль оси стержня и фиксировать в любом положении. Эти элементы выполнены таким образом, что их размер вдоль стержня является кратным 10 мм, а фиксирующие воротки размещены так, что при помощи кольцевых нарезок их можно было бы наглухо блокировать.
Нижний кронштейн вместе с фотоэлектрическим датчиком можно перемещать вдоль колонки и фиксировать в произвольно избранном положении.
Фотоэлектрический
датчик соединен разъемом с универсальным
секундомером. В
Рис.
1.5
Нажатием клавиши «пуск» начинается отчет времени. Визуально это обнаруживается свечением цифровых индикаторов. Нажатие клавиши «сброс» вызывает сброс схем секундомера и генерирование сигнала разрешения на измерение.
 Рис.
6.4
Рис.
6.4
Нажатие клавиши «стоп» вызывает генерирование сигнала разрешения на окончание процесса подсчета. Прибор готов к работе непосредственно после включения напряжения сети и не нуждается в нагреве.
Порядок выполнения работы и обработка результатов измерений
1. Повернуть верхний кронштейн на 180°.
2. Зафиксировать ролики на стержне так, чтобы один из них находился вблизи конца стержня, а другой – вблизи его середины.
3. Ножи маятника закрепить по обеим сторонам центра тяжести так, чтобы они были обращены друг к другу лезвиями. При этом один из ножей поместить вблизи свободного конца стержня, а второй – на половине расстояния между роликами.
4. Проверить совпадение граней лезвий ножей с нарезками на стержне.
5. Закрепить маятник на вкладыше верхнего кронштейна на ноже, находящемся вблизи конца стержня (положение 1).
6. Нижний кронштейн с фотоэлектрическим датчиком разместить так, чтобы стержень маятника пересекал оптическую ось.
7. Отклонить маятник на 3 ÷ 5° от положения равновесия и отпустить.
8. Нажать клавишу «сброс».
9. После подсчета измерений n полных колебаний (не менее 10) нажать клавишу «стоп» и записать время t1. Измерения выполнить не менее 3 раз и результаты свести в табл. 6.2.
Таблица 6.2
|
n = 10 | |||||||||||
|
Положение 1 |
Положение 2 | ||||||||||
|
r, мм |
0 |
0 |
10 |
20 |
30 |
40 | |||||
|
t1, с |
t1ср,с |
t2, с |
t2ср, c |
t2, с |
t2ср, c |
t2, с |
t2ср,c |
t2, с |
t2ср,c |
t2, с |
t2ср,c |
|
1 2 3 |
|
1 2 3 |
|
1 2 3 |
|
1 2 3 |
|
1 2 3 |
|
1 2 3 |
|
10. Перевернуть маятник и поставить его на второй нож: переместить нижний кронштейн с фотоэлектрическим датчиком так, чтобы маятник пересекал оптическую ось (положение 2).
11. Измерить время t2 n полных колебаний согласно пунктам 7, 8 и 9.
12. Перемещая второй нож через каждые 10 мм и измеряя каждый раз t2, найти такое положение второго ножа, при котором t2 отличается от t1 не более чем не 0,5%, т.е. должно выполняется условие
0,995 < t1/t2 < 1,005.
13. Определить приведенную длину lпр оборотного маятника по числу нарезок на стержне между ножами (нарезки нанесены через 10 мм).
14. Ускорение свободного падения определить по формуле (6.11)
![]() ,
,
где t = 0,5(t1+ t2) , а t1 и t2 отличаются не более чем на 0,05 %.
При правильном отсчете всех величин погрешность определения ускорения свободного падения с помощью физического маятника не превышает одного процента.