

Порядок выполнения работы и обработка результатов измерений
Перемещая груз (5), установить рычаг гироскопа перпендикулярно оси, чтобы ось гироскопа была горизонтальной.
Включить питание двигателя.
Отрегулировать обороты двигателя 6000 об/мин.
Переместить груз на 2 см от положения равновесия.
Нажать кнопку "Сброс".
После показания времени не менее 30 с нажать "Стоп".
Снять показания угла αi и времени ti прецессии.
Вычислить угловую скорость прецессии по формуле
 .
.Изменяя положение груза на 2 см, повторить измерения. При этом ось гироскопа каждый раз ориентировать в исходное состояние, одинаковое при всех измерениях.
Таблица 5.2
|
l, cм |
2 |
4 |
6 |
8 |
10 |
12 |
|
α ·10, град |
|
|
|
|
|
|
|
t, c |
|
|
|
|
|
|
|
Ω ,с-1 |
|
|
|
|
|
|
10. Построить график зависимости = f(r) и убедиться в его линейности.
11.
Проверить соотношения
![]()
![]()
Контрольные вопросы
Сформулируйте цели работы.
Как определяются направления векторов: углового перемещения, угловой скорости, углового ускорения?
Запишите выражения для момента импульса относительно точки и относительно неподвижной оси.
Сформулируйте 2-ой закон динамики для вращательного движения.
Запишите выражение момента сил относительно точки.
Сформулируйте закон сохранения момента импульса.
Что называется гироскопом?
Куда направлен вектор момента импульса гироскопа?
Каково направление вектора момента сил гироскопа? С каким вектором совпадает направление момента сил?
Запишите условие равновесия системы.
Какое движение называется прецессией? Чему равна угловая скорость прецессии?
Как изменится скорость прецессии с изменением угловой скорости вращения?
Сделайте выводы по работе.
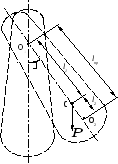
6. Механические колебания. Физический маятник
|
Р |
 ис.
6.1
ис.
6.1
Если мятник
отклонить от положения равновесия на
угол ,
то сила тяжести
![]() создает относительно оси вращения
(проходит через т. О1
перпендикулярно
к плоскости рисунка) вращающий момент
создает относительно оси вращения
(проходит через т. О1
перпендикулярно
к плоскости рисунка) вращающий момент
![]() ,
(6.1)
,
(6.1)
где l1 – расстояние от оси вращения до центра тяжести С, m – масса маятника, а угол отсчитывается от вертикальной линии против часовой стрелки. Момент силы М стремится вернуть маятник в положение равновесия.
При малых углах отклонения колебания маятника будут близки к гармоническим. Действительно, при малых углах sin и формула (6.1) принимает вид
![]() . (6.2)
. (6.2)
По основному закону динамики вращательного движения
![]() ,
(6.3)
,
(6.3)
где J
– момент инерции маятника относительно
оси О1;
![]() –угловое ускорение.
–угловое ускорение.
Подставляем M и ε в формулу (6.3):
![]() .
(6.4)
.
(6.4)
Обозначая
![]() ,
перепишем равенство (6.4) в виде
,
перепишем равенство (6.4) в виде
![]() . (6.5)
. (6.5)
Уравнение (6.5) – дифференциальное уравнение гармонических колебаний. Решением этого уравнения является функция
![]() , (6.6)
, (6.6)
где 0
– максимальный угол отклонения маятника
от положения равновесия, а
![]() круговая
(или циклическая) частота.
круговая
(или циклическая) частота.
Для периода колебаний получаем
![]() . (6.7)
. (6.7)
Величину
![]() называютприведенной
длиной физического маятника.
Подставив это в выражение (6.7), найдем,
что приведенная длина физического
маятника равна длине математического
маятника с таким же периодом колебаний.
называютприведенной
длиной физического маятника.
Подставив это в выражение (6.7), найдем,
что приведенная длина физического
маятника равна длине математического
маятника с таким же периодом колебаний.
Точка, находящаяся на расстоянии lпр от точки подвеса по линии, проходящей через центр тяжести, называется центром качания.
Точка подвеса и центр качания обладают свойством обратимости: если центр качания сделать точкой подвеса, то прежняя точка подвеса станет новым центром качания, при этом период колебаний не изменится.
Для доказательства этого утверждения воспользуемся теоремой Штейнера: момент инерции тела относительно оси z равен моменту инерции этого тела относительно оси z’, проходящей через его центр инерции параллельно оси z, плюс произведение массы тела на квадрат расстояния между осями z и z’, т.е.
![]() , (6.8)
, (6.8)
где J – момент инерции относительно оси z; J0 – момент инерции относительно оси z’; m – масса тела; l – расстояние между осями z и z’.
Рассмотрим вращение физического маятника вокруг точки О1 (см. рис. 6.1).
Проведем линию
О1С
и на ее продолжении возьмем точку О2,
такую, что О1О2
= lпр1.
Обозначим О2С
= l2,
так что
![]() .
Тогда
.
Тогда
![]() .
.
Таким образом,
![]() .
.
Теперь перевернем маятник и рассмотрим его вращение вокруг оси, проходящей через точку О2, при этом
![]() ,
,
откуда следует, что lпр1 =lпр2.