

Синхронизирующая мощность и синхронизирующий момент.
В § 35-3 было выяснено, что в определенных пределах значений угла нагрузки 8 синхронная машина способна сохранять синхронный режим работы. Это обусловлено тем, что при отклонении угла 8 от своего устойчивого установившегося значения на некоторую величину А 6 возникает разность АР между подводимой к машине мощностью и отдаваемой ею мощностью (рис. 35-9), под воздействием которой устойчивое состояние работы восстанавливается. Мощность АР поэтому называется синхронизирующей мощностью. Этой мощности, согласно выражению (35-7), соответствует электромагнитный момент AM, под воздействием которого ротор несколько ускоряется или замедляется и тем самым возвращается в равновесное положение. Момент AM поэтому также называется синхронизирующим.
Если отклонение А в мало, то АР и ДМ пропорциональны Аб (см. рис. 35-9):

![]()
На основании выражений (35-4) и (35-17)
Для неявнополюсной (xq = xd) и реактивной (Е = 0) машин выражения (35-18) и (35-19) соответственно упрощаются.
Кривые Рс-М по формуле (35-18) изображены на рис. 35-9 и 35-12 штриховыми линиями. Как следует из этих рисунков и неравенства (35-8), режим работы синхронной машины устойчив, когда Рс м > 0 и Afc. м > 0. Положительный знак этих коэффициентов поэтому является одним из критериев устойчивости статического режима работы. С другой стороны, очевидно, что синхронизирующие электромагнитные силы при прочих равных условиях тем больше, чем больше Рс м и Мс. м. Поэтому из выражений (35-18) и (35-19) можно сделать вывод, что при различных возмущениях перевозбужденная синхронная машина (Е >> U) в большей степени способна сохранять устойчивый режим работы, чем недовозбужденная (Е < U). На границе зоны устойчивой работы (б = екр) имеем Рс „•= 0 и Мс. „ = 0.
Статическая перегружаемость. Когда мощность синхронной машины Р = 0, также 8=0. При увеличении Р растет также 6, и при 6 = б Кр мощность достигает максимального значения Р = Рт. При дальнейшем увеличении механической мощности на валу машина выйдет из синхронизма и ее ротор будет вращаться асинхронно, с некоторым скольжением s относительно поля статора (поля реакции якоря). У двигателя скорость ротора будет меньше синхронной (s > 0) и у генератора — больше синхронной (s<0). Подобный асинхронный режим является ненормальным и недопустим, так как он опасен для машины и нарушает нормальную работу сети, машин и механизмов, соединенных с синхронной машиной. Поэтому при эксплуатации синхронных машин необходимо заботиться о том, чтобы их устойчивая синхронная работа была в достаточной степени обеспечена.
При работе синхронные машины могут подвергаться кратковременным перегрузкам. Кроме того, вследствие уменьшения напряжения, например, при коротких замыканиях в сети максимальная мощность Рт, которую способна развивать машина, снижается [см. равенство (35-6) и др.]. Поэтому необходимо, чтобы машина имела достаточный запас мощности, т. е. чтобы значение Рт было достаточно велико.

![]()
Статическая перегружаемость синхронной машины кп характеризуется отношением Рт при U = £/„ и if — ifж к номинальной мощности Ря:

![]()
Выражения (35-23) и (35-24) приводятся в ГОСТ 533—68 на турбогенераторы.
Согласно этому стандарту, статическая перегружаемость турбогенераторов мощностью до 300 000 кет должна быть не менее
ka =1,7, а для турбогенераторов мощностью 500 000— 800 000 кет — не менее kn = = 1,6. Как следует из изложенного, статическая пере-гружаемость турбогенераторов, как, впрочем, и явно-полюсных машин, тем больше, чем больше их о. к. з., т. е. чем меньше Ха* или чем больше воздушный зазор.
0,4 0,8 4,2 4,6 2,0
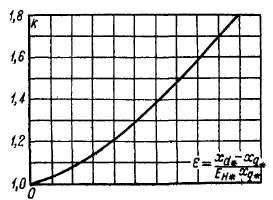
Рис. 35-14. Кривая коэффициента k, учитывающего влияние реактивного момента явнополюсной машины на статическую перегружаемость
Статическая перегружае-мость явнополюсных машин также выражается равенствами (35-22) — (35-25), если в них вводится добавочный множитель k,
который учитывает влияние второго члена равенства (35-4). Величина k при этом определяется графиком рис. 35-14, где
Статическая перегружаемость как явнополюсных, так и неяв-нополюсных синхронных двигателей с cos фн = 0,9 (режим перевозбуждения), согласно ГОСТ 183—66, должна быть не менее ka = 1,65. Статическая перегружаемость гидрогенераторов, согласно ГОСТ 5616—72, должна быть не ниже kn = 1,7.
§ 35-5. Работа синхронной машины при постоянной мощности и переменном возбуждении
Как было выяснено в § 35-2, изменение тока возбуждения вызывает изменение только реактивных составляющих тока и мощности якоря. Рассмотрим теперь зависимость величины тока / от тока возбуждения if при Р — const в случае параллельной работы машины с сетью бесконечной мощности (U — const, / = const). Для лростоты определим эту зависимость для неявнополюсной машины (рис. 35-15), так как получаемые при этом результаты характерны также для явнополюсной машины, причем будем рассматривать приведенные к обмотке якоря значения тока возбуждения.
![]()
![]()
При Р = const активная составляющая тока Ia = const. Поэтому на векторной диаграмме рис. 35-15 конец вектора / скользит по прямой АВ. Если положить для простоты хаа = О, то внутренняя э. д. с. Ец = U = const и составляющая тока возбуждения tfo, создающая результирующий поток Фа, также постоянна. Полный ток возбуждения
Рис 35-15 Упрощенная векторная диаграмма неявнополюсного синхронного генератора
легко определяется по диаграмме. Конец вектора ij находится в точке О', а его начало, очевидно, также скользит по прямой АВ. На рис. 35-15 сплошными линиями построена диаграмма токов для одного значения if, а штриховыми линиями — несколько
диаграмм для других значений if. Концы векторов / и начала векторов if располагаются в точках /, 2, 3, 4 на прямой АВ.
Из рис. 35-15 следует, что при непрерывном изменении if ток / и cos ф также беспрерывно изменяются, причем при некотором значении i\ величина / минимальна и cos ф =.1, а при увеличении if (режим перевозбуждения) и уменьшении ij (режим недовозбуждения) против указанного значения if величина тока / возрастает, так как растет его реактивная составляющая. Более точно зависимость / = /(tf) можно определить путем построения точных векторных диаграмм. На рис. 35-16 представлен характер зависимостей / = / (ij) О при разных значениях Р = const.

Рис 35-16. U-образные характеристики синхронной машины
Эти зависимости по виду называются также U-образными характеристиками. Минимальное
значение / для каждой кривой определяет активную составляющую тока якоря 1а и величину мощности
Р = тШ„,
для которой построена данная кривая. Нижняя кривая соответствует Р = О, причем ij0 — значение тока возбуждения при Е = U. Правые части кривых соответствуют перевозбужденной машине
![]()

![]()
и отдаче в, сеть индуктивного тока и реактивной мощности, а левые части — недовозбужденной машине, отдаче в сеть емкостного тока и потреблению реактивной мощности. Кривая ср = 0 или cos ср = 1 отклоняется при увеличении мощности вправо, так как вследствие падения напряжения хаа1 возрастает значение Ее, и необходимый ток возбуждения при cos ср = 1. Кривая ОС на рис. 35-16 в сущности является регулировочной характеристикой машины при cos ф = 1 (см. рис. 33-11).
Точка А на рис. 35-16 соответствует холостому ходу невозбужденной машины. При этом из сети потребляется намагничивающий ток
Угол нагрузки 8 возрастает при движении вдоль кривых рис. 35-16 справа налево, так как, согласно равенству (35-4), при меньших if и Е угол 9 при Р = const увеличивается. Линия АВ представляет собой границу устойчивости, на которой 8 = 9Kp-При дальнейшем уменьшении if машина выпадает из синхронизма. U-образные характеристики генератора и двигателя практически не отличаются друг от друга.