


ГЛАВА 2. ВТОРОЙ МЕТОД ЛЯПУНОВА_______________________________________________________98
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
b1 |
≤ |
W |
≤ |
b2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a2 |
V |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
В таком случае из равенства (9) вытекают неравенства |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
− |
b2 |
(t−t0 ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
b1 |
(t−t0 ) |
|
|
|
|
|||||||||||
V(t |
|
, x |
|
|
|
≤ V (t; t |
|
, x |
|
) ≤ |
V(t |
|
, x |
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
0 |
0 |
) e a1 |
|
0 |
0 |
0 |
0 |
) e |
a2 |
. |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Заменим V(t0, x0) |
в левом неравенстве на |
a1 |
|
|
|
x0 |
|
|
|
2 , а V1 – на |
a2 |
|
|
|
x0 |
|
|
|
2 : |
|||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
− |
b2 |
(t−t |
0 |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 . |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
a1 || x0 ||2 e |
a1 |
≤ a2 |
|
|
x(t) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
Аналогичным образом поступим и с правым неравенством: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 ≤ a2 || x0 ||2 e |
− |
b1 |
(t−t |
0 |
) |
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||
|
|
|
|
a1 |
|
|
|
x(t) |
|
|
|
|
a2 |
|
|
|
. |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
Из последних двух неравенств легко вывести (6) ■
30. Матричное уравнение Ляпунова. Перепишем уравнение (7) с учётом
равенств V(t,x) = xT P(t) x и |
W(t,x) = xT Q(t) x : |
|
|
|
|||||||||
dV |
= |
dxT |
P(t) x +x |
T |
|
dP(t) |
x + x |
T |
P(t) |
dx |
= −x |
T |
Q(t) x . |
dt |
dt |
|
dt |
|
dt |
|
|||||||
|
|
|
|
|
|
|
|
|
|
||||
Поскольку x = x(t) |
– решение системы (5), имеем |
|
|
|
|
||||||||
dV |
= xT AT (t) P(t) + dP(t) +P(t) A(t) |
x = −xT Q(t) x . |
|||||||||||
dt |
|
|
|
|
|
dt |
|
|
|
|
|
|
|
Отсюда благодаря произвольности выбора x = x(t) следует равенство |
|
||
|
dP(t) |
+ AT (t) P(t) + P(t) A(t) = −Q(t) , |
(10) |
|
dt |
||
|
|
|
|
которое именуют матричным уравнением Ляпунова.
Оказывается, в частном случае, когда A – постоянная матрица, в качестве матрицы Q также можно выбрать постоянную положительно определённую матрицу1. Тогда уравнение (10) будет иметь единственное решение в виде постоянной матрицы P, причём эта матрица будет положительно определённой.
В соответствии с этим, для асимптотической устойчивости линейной однородной системы (5) с постоянной матрицей A необходимо и достаточ-
1 Напоминаем, что симметричная матрица положительно определена, если таковой же является квадратичная форма с данной матрицей.

ГЛАВА 2. ВТОРОЙ МЕТОД ЛЯПУНОВА_______________________________________________________99
но, чтобы для произвольно выбранной постоянной положительно определённой матрицы Q линейная алгебраическая система
AT P +P A = −Q
имела единственное решение относительно P и чтобы это решение представляло собой симметричную положительно определённую матрицу.
Упражнения
1)Проверить, являются ли экспоненциально устойчивыми нулевые решения следующих уравнений
i)x& = −xt 14 ,
ii)x& = −xsin2 t ,
iii)x& = −x ln(1+t)1+t .
§ 6. Устойчивость квазилинейных систем
Существует класс нелинейных дифференциальных систем, правые части которых близки к правым частям некоторых линейных систем в окрестности положения равновесия. В таком случае оказывается, что с точки зрения устойчивости в обоих классах систем положения равновесия ведут себя сходным образом. Соответствующие результаты формулируются ниже.
10. Теорема Ляпунова об устойчивости квазилинейной системы. Рас-
смотрим нелинейную дифференциальную систему
|
dx |
= A x +ϕ(t, x) |
|
|
|
|
|
|
|
|
(t ≥ 0) , |
(1) |
|
|
|||||||||||
|
dt |
|
|
|
|
|
|
|
|
|
|
|
где А – постоянная матрица размера n × n и векторная функция ϕ(t, x) |
опре- |
|||||||||||
делена и непрерывна на множестве {(t,x) | t ≥ 0, |
|
|
|
x |
|
|
|
≤ H}. |
|
|||
|
|
|
|
|
||||||||
Будем предполагать, что ϕ(t, 0) = 0 |
для всех t ≥ 0, т.е. система (1) имеет |
|||||||||||
нулевое решение (положение равновесия). |
|
|
|
|
|
|
|
|
|
|
||
Линейная система |
|
|
|
|
|
|
|
|
|
|
||
ddtx = A x
называется системой линейного приближения системы (1).

ГЛАВА 2. ВТОРОЙ МЕТОД ЛЯПУНОВА_______________________________________________________100
Теорема 1. Предположим, что функция ϕ(t, x) удовлетворяет условию
||ϕ( |
t, |
x) || →→ 0 |
|
|
|
равномерно по t ≥ 0 при x →0 . |
(2) |
|||||||||||||||
|
x |
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если при этом все собственные значения λj, |
j = 1,2,...,n , матрицы А имеют |
|||||||||||||||||||||
отрицательные вещественные части, т. е. |
|
|
||||||||||||||||||||
|
|
|
|
|
|
Re λj |
< 0, j = 1,2,...,n , |
|
||||||||||||||
то нулевое решение системы (1) асимптотически устойчиво по Ляпунову. |
|
|||||||||||||||||||||
□ Через ξ(t; x) |
обозначим решение соответствующей линейной систе- |
|||||||||||||||||||||
мы: |
|
|
|
|
|
|
|
|
dξ |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
= A ξ |
|
(3) |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
dt |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с начальным условием |
(0,x) , т.е. |
ξ(0;x) = x Rn . |
|
|||||||||||||||||||
Пусть K(t) – нормированная фундаментальная матрица (матрицант) сис- |
||||||||||||||||||||||
темы (2), K(0) = E . Имеем |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
ξ(t; x) = K(t) x . |
|
(*) |
||||||||||||||
В силу отрицательности вещественных частей собственных значений λj |
при |
|||||||||||||||||||||
некотором N > 0 выполнено |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
||K(t)|| ≤ N e−αt |
t ≥ 0 , |
|
||||||||||||||
где max Re λj < −α < 0 . Отсюда |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
j |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
ξ(t;x) |
|
|
|
≤ N e−αt |
|
|
|
x |
|
|
|
|
t ≥ 0 . |
(**) |
||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
Рассмотрим функцию |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
+∞ |
|
|
||||||||
|
|
|
|
|
|
V(x) = ∫ || ξ(τ; x)||2dτ. |
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
С учётом (*) для нее получаем представление |
|
|
||||||||||||||||||||
+∞ |
|
|
|
|
|
|
|
|
|
+∞ |
|
|
||||||||||
V(x) = ∫ K(τ) x, K(τ) x dτ = ∫ KT (τ) K(τ) x, x dτ = S x, x , |
|
|||||||||||||||||||||
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
ГЛАВА 2. ВТОРОЙ МЕТОД ЛЯПУНОВА_______________________________________________________101
+∞
где S := ∫ KT (τ) K(τ)dτ.
0
Таким образом, V(x) – квадратичная форма относительно переменных
x1 |
, ... , xn с вещественной симметричной матрицей S = (Sjk ) |
. |
|
|
n x n |
|
В силу (**) интеграл, определяющий V, сходится. Поэтому квадратичная |
|
форма V определена на Rn и конечна, причём на основании единственности решения линейной системы (2) верно
V(x) > 0 |
x ≠ 0, |
V(0) = 0 . |
|
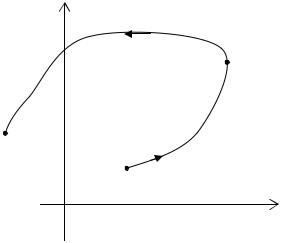
Воспользуемся групповым свойством ξ(t;ξ(τ;x)) = ξ(t + τ;x) решений |
|
автономной системы (2), которое выражает тот факт, что состояние системы ξ(t+τ; x) (т.е. правая часть написанного выше равенства) к моменту времени t + τ, полученное перемещением вдоль траектории из начальной точки x = ξ(0; x), может быть достигнуто движением вдоль этой траектории из «промежуточной» точки ξ(τ;ξ(0; x)) за время t (см. рис. 2.4).
y2
ξ(τ;ξ(0; x))
ξ(t+τ; ξ(0; x)))
ξ(0; x) = x
y1
Рис. 2.4. Иллюстрация группового свойство системы.
Получим
+∞ |
+∞ |
+∞ |
V(ξ(t; x)) = ∫ || ξ(τ; ξ(t; x)) ||2dτ = ∫ || ξ(t + τ;x) ||2dτ = ∫ || ξ(τ;x)||2dτ. |
||
0 |
0 |
t |
Дифференцируя V(ξ(t; x)) |
по t в силу системы (2) в точке x, находим |
|