

ГЛАВА 1. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ
Вэтой главе исследуется устойчивость самого простого класса дифференциальных систем – линейных систем. В частности, устанавливается, что для линейных систем с постоянными коэффициентами свойство устойчивости самым непосредственным образом связано со знаками вещественных частей корней характеристического полинома матрицы данной линейной системы. Тем самым, вопрос устойчивости таких систем принимает чисто алгебраическую форму и для его решения можно использовать соответствующие средства алгебры.
Вначале главы формулируются фундаментальные определения устойчивости и асимптотической устойчивости по Ляпунову невозмущенного решения дифференциальной системы общего вида.
§ 1. Основные понятия теории устойчивости
1о. Исходная система уравнений. Нормальная система дифференциаль-
ных уравнений (с.д.у.) имеет вид |
|
|
||
|
dyi |
= fi (t, y1 ,..., yn ), |
i =1, 2,..., n , |
(1) |
|
dt |
|
||
|
|
|
|
|
где
t – независимое переменное (время),
y1,..., yn – искомые функции переменной t (фазовые переменные),
fi : [0,+∞) × D → R – числовые функции n +1 переменной, D – некоторая область фазового пространства Rn.
З а м е ч а н и е 1. Дифференциальная система (1) с произвольным начальным моментом времени t = t0 при помощи замены t/ = t – t0 сводится к аналогичной системе с нулевым начальным моментом времени t/ = 0. По этой причины всюду далее, если не оговорено противное, будет рассматриваться дифференциальная система с нулевым начальным моментом времени. При этом в случае необходимости читатель без особого труда любой полученный результат может легко переформулировать применительно к системе с ненулевым начальным моментом времени.
Перепишем дифференциальную систему (1) в векторной форме:
dy |
= f (t, y) |
(t ≥ 0), |
(1/) |
dt |
|
|
|
где
ГЛАВА 1. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ_______________________________________________17
|
|
|
|
|
|
|
|
dy1 |
|
|
|
y |
|
f |
|
(t, y) |
|
|
|
|
|
|
|
|
|
|
|||||||||
1 |
|
dt |
|
|
|||||||
|
1 |
|
|
|
dy |
|
|||||
|
|
|
|
|
|
|
|
|
|||
y = M |
, |
f (t, y) = M |
|
|
, |
|
= M |
|
. |
||
|
|
dt |
|||||||||
|
|
|
|
|
|
|
|
|
|||
yn |
fn (t, y) |
|
|
dyn |
|
||||||
|
|
|
|
|
|
|
|
dt |
|
|
|
Напомним, что n-мерную непрерывно дифференцируемую вектор- |
|||||||||||
функцию y = y(t) C1[t0 ,a) |
(t0 ≥ 0) называют решением системы дифференци- |
||||||||||
альных уравнений (1) на промежутке [t0, a), если |
|
|
|
|
|
||||||
|
dy(t) |
= f (t, y(t)) |
|
|
t [t0 , a) . |
|
|
||||
|
dt |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
||
Далее предполагается, что вектор-функция |
f (t, y) |
по крайней мере не- |
|||||||||
прерывна в области [0,+∞) × D, которая является областью существования и единственности решения задачи Коши (последнее автоматически выполняется для линейных систем). Нередко в соответствии с механической интерпретацией системы (1) решения уравнения (1) называют движениями данной системы.
Решению (интегральной кривой) y = y(t) = y(t; t0, y0) (t0 ≥ 0, y0 D) системы (1) c начальным условием y(t0) = y0 соответствует определенная траектория в фазовом векторном пространстве Rn; при этом t играет роль параметра. Геометрически траектория является проекцией интегральной кривой на фазовое пространство. Совокупность всех траекторий некоторой системы нередко называют её фазовым портретом.
Согласно теореме об интегральной непрерывности, если вектор-функция
f (t, y) в любой ограниченной части области |
[0,+∞) × D удовлетворяет усло- |
вию Липшица по переменной y, то решения |
y(t) системы (1), содержащиеся |
при всех t ≥ 0 в области [0,+∞) × D , обладают свойством интегральной не-
прерывности:
|
|
|
для любых |
ε > 0 , t0 ≥ 0 |
и произвольного T > 0 |
найдется такое δ > 0, |
||||||||||||
что всякое |
решение |
z(t) |
= z(t; t0, |
z0), |
удовлетворяющее условию |
|||||||||||||
|
|
|
z0 −y(t0 ) |
|
|
|
|
|
|
|
< δ, |
имеет |
смысл |
при всех |
t0 ≤ t ≤ T, |
причем неравенство |
||
|
|
|
|
|||||||||||||||
|
|
|
z(t) −y(t) |
|
|
|
|
|
< ε выполняется для всех t [t0 , t0 +T]. |
|
|
|||||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
Здесь |
y = |
y12 +K+ y2n – евклидова норма вектора y. |
|||||||||||||
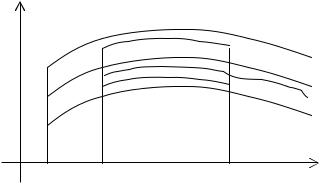
Свойство интегральной непрерывности выражает «плавный» характер изменения интегральных кривых. Геометрически, интегральная непрерывность означает, что все решения, попадающие в какой-то произвольный момент времени t0 ≥ 0 в некоторую δ-трубку решения y(t), не покидают пределы сколь

ГЛАВА 1. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ_______________________________________________18
угодно узкой наперед заданной ε-трубки того же решения на всем протяжении отрезка [t0 , t0 +T] (рис. 1.1).
y
|
|
y(t) |
z0 |
|
z(t) |
δ |
|
|
ε |
|
|
|
|
|
ε |
|
|
t0 |
t0+T |
t |
Рис. 1.1. Иллюстрация интегральной непрерывности.
2о. Основные определения.
О п р е д е л е н и е |
1. |
Решение η= η(t) ( t ≥ 0) системы (1) называют |
устойчивым по Ляпунову при |
t → +∞ ( или просто устойчивым), если для лю- |
|
бого ε > 0 и для любого t0 |
≥ 0 |
найдется δ = δ(ε, t0 ) > 0 такое, что справедливы |
следующие два условия |
|
|
1)все решения y = y (t) системы (1) (включая η), удовлетворяющие неравенству
|
|
|
y(t0 ) −η(t0 ) |
|
|
|
< δ, |
|
|
|
|
|
(*) |
|||||||||||
|
|
|
|
|
|
|
|
|
||||||||||||||||
определены на [t0 ,+∞), т.е. y(t) D |
для всех t ≥ t0 ; |
|
|
|
|
|
||||||||||||||||||
2) для этих решений выполняется неравенство |
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
y(t) −η(t) |
|
|
|
< ε |
t ≥ t0 . |
(**) |
||||||||||||
|
|
|
|
|
|
|
||||||||||||||||||
З а м е ч а н и е 2. Из (**) при t = t0 следует |
|
|
|
y(t0 ) −η(t0 ) |
|
|
|
< ε, поэтому |
||||||||||||||||
|
|
|
|
|||||||||||||||||||||
в определении устойчивого решения всегда можно считать, что |
δ≤ ε. |
|||||||||||||||||||||||
y
εδ
ε |
δ |
η(t) |
|
||
|
|
y(t) |
t0 |
|
t |
|
Рис. 1.2. Иллюстрация к замечанию 2. |
|
ГЛАВА 1. УСТОЙЧИВОСТЬ ЛИНЕЙНЫХ СИСТЕМ_______________________________________________19
З а м е ч а н и е 3. Если имеет место свойство интегральной непрерывности, то решение η= η(t) ( t ≥ 0 ), устойчивое для некоторого фиксированного
момента t0 ≥ 0 , будет устойчивым и для любого t0 ≥ 0 (см. рис. 1.3). |
|||
□ В самом деле, возьмем произвольное t/0 < t0 и зафиксируем его. Благо- |
|||
даря свойству интегральной непрерывности найдется такое |
δ/ > 0, при котором |
||
всякое решение y(t), попадающее в δ/-трубку решения η(t) |
в момент времени |
||
t = t/0, останется в δ-трубке решения |
η(t) |
к моменту времени t = t0, а значит, в |
|
соответствии с устойчивостью (для |
t = t0), |
не покинет пределы ε- трубки того |
|
же решения при всех t ≥ t0. Это означает, что из устойчивости решения для
фиксированного момента времени |
t = t0 вытекает устойчивость того же реше- |
|
ния для любого меньшего момента времени t/0 < t0. |
||
Рассмотрение случая t/0 > t0 |
проводится аналогично ■ |
|
y |
|
|
δ/{ |
}δ |
|
η(t) |
||
δ/{ |
||
y(t)
t/0 t0 t
Рис. 1.3. Иллюстрация к замечанию 3.
Таким образом, при выполнении свойства интегральной непрерывности для установления факта устойчивости имеющегося решения достаточно ограничиться проверкой этого свойства лишь для некоторого момента времени t0 .
З а м е ч а н и е 4. Устойчивость заданного решения системы (1) эквивалентна его интегральной непрерывности на каждом бесконечном промежутке [t 0 ,+∞) , где t0 ≥ 0 ; читателю предлагается убедиться в этом самостоятельно.
О п р е д е л е н и е 2. Если число δ > 0 |
из определения 1 устойчивого |
||
решения можно выбрать не зависящим от момента времени t0 T , т.е. δ = δ(ε), |
|||
то такое решение называют равномерно устойчивым в области T R . |
|||
Всякое решение, не являющееся устойчивым, естественно называть неус- |
|||
тойчивым. Тем самым, приходим к следующему определению. |
|||
О п р е д е л е н и е 3. Решение η = η(t) |
( t ≥ 0) |
системы (1) называют |
|
неустойчивым по Ляпунову, если существуют |
ε > 0 и |
t0 ≥ 0 , такие, что для |
|
любого δ > 0 |
можно указать решение yδ(t), обладающее тем свойством, что |
||
при некотором |
t1 = t1 (δ)> t0 справедливы неравенства |
|
|