

Лекция №10.
Пара сил. Момент пары. Закон сохранения момента импульса твердого тела и примеры его проявления. Вычисление моментов инерции тел . Теоремы Штейнера-Гюйгенса. Кинетическая энергия вращательного движения .
Пара сил — это две равные по величине и противоположные по направлению параллельные силы, приложенные к одному телу. Пара сил не имеет равнодействующей. Кратчайшее расстояние между линиями действия сил, образующих пару сил, называют плечом пары. Действие пары сил на тело характеризуется моментом пары сил — произведением одной из сил на плечо.
Найдем значение вектора момента пары сил.
Положим,
к телу приложена пара сил
![]() и
и![]() .
Рассечем
тело плоскостью, в
которой лежат силы (рис. 3).
.
Рассечем
тело плоскостью, в
которой лежат силы (рис. 3).
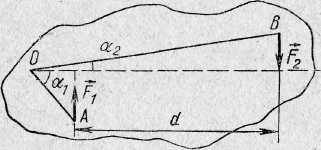
рис. № 3. Момент пары сил.
Возьмем
произвольную
точку О, лежащую в этой плоскости. Момент
силы
 относительно
этой точки M1=F1OA
относительно
этой точки M1=F1OA![]()
![]() и направлен перпендикулярноплоскости
чертежа к нам. Момент силы
и направлен перпендикулярноплоскости
чертежа к нам. Момент силы
![]() равен
M2=F2OB
равен
M2=F2OB![]() и
направлен
перпендикулярно плоскости чертежа от
нас Суммарный момент
пары сил равен алгебраической сумме
моментов Mt
и
М2:
и
направлен
перпендикулярно плоскости чертежа от
нас Суммарный момент
пары сил равен алгебраической сумме
моментов Mt
и
М2:
M=![]() .
.
Но
поскольку
![]() ,
,
![]() .
.
Выражение,
стоящее в скобках, представляет собой
расстояние между линиями действия сил.
Обозначим это расстояние через
![]()
Тогда
![]() ,
,
где d — плечо пары сил.
Вектор момента пары сил численно равен произведению величины одной из сил пары на плечо пары. Он направлен в сторону поступательного движения буравчика, рукоятка которого вращается по направлению сил пары.
В механике имеется три закона сохранения: импульса, энергии и момента импульса. Все они являются следствиями законов движения. Ограничимся лишь простыми частными случаями.
Если при вращении тела вокруг неподвижной оси момент внешних сил относительно этой оси равен нулю, то равна нулю производная момента импульса тела:
![]()
Это означает, что сам момент импульса остается постоянным:
![]()
Из неизменности момента инерции J твердого тела, вращающегося вокруг определённой оси, следует постоянство угловой скорости вращения. Так, если бы не было трения, то не менялась бы угловая скорость вращающегося на оси колеса.
Последнее уравнение и является формой закона сохранения момента импульса для частного случая вращения вокруг неподвижной оси. В общем случае этот закон формулируется так: в замкнутой системе тел полный (суммарный) момент импульса остаётся постоянным.
Если
момент внешней силы, действующей на
тело, равен нулю, то уравнение
![]() выполняется и в том случае, когда тело
не является твёрдым, т.е. когда момент
его инерции может изменяться. Причём в
этом случае закон сохранения момента
импульса позволяет простым путём
получить важные заключения о характере
вращения тела.
выполняется и в том случае, когда тело
не является твёрдым, т.е. когда момент
его инерции может изменяться. Причём в
этом случае закон сохранения момента
импульса позволяет простым путём
получить важные заключения о характере
вращения тела.
Все вы могли видеть, как балерина или конькобежец-фигурист легко меняет скорость своего вращения , не отталкиваясь от пола или льда. То же явление можно наблюдать и по-другому. Человек становится на круглую платформу, которая может вращаться вокруг вертикальной оси без заметного трения (скамья Жуковского). Оттолкнувшись затем от пола, он начинает вращаться, Меняя затем положение рук (лучше с тяжёлыми предметами в ладонях), т.е. меняя момент инерции тела, человек тем самым меняет и угловую скорость вращения,
Для вычисления момента инерции необходимо мысленно расчленить тело на достаточно малые элементы, точки которых можно считать лежащими на одинаковом расстоянии от оси вращения, затем найти произведение массы каждого элемента на квадрат его расстояния от оси и, наконец, просуммировать все полученные произведения. Очевидно, это весьма трудоемкая задача. Для подсчета моментов инерции тел правильной геометрической формы можно воспользоваться в ряде случаев приемами интегрального исчисления .
Нахождение конечной суммы моментов инерции элементов тела заменим суммированием бесконечно большого числа моментов инерции, вычисленных для бесконечно малых элементов:
![]() .
.
Вычислим в качестве примера момент инерции однородного диска или сплошного цилиндра высотой h относительно его оси симметрии (рис. 4).
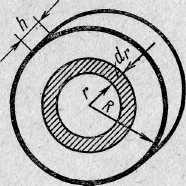
рис.№4 Вычисление момента инерции однородного диска
Расчленим
диск на элементы в виде тонких
концентрических колец
с центрами на оси его симметрии. Полученные
кольца имеют внутренний
диаметр
r
и
внешний r-dr,
а
высоту h.
Так
как dr<<r,
то
можем считать, что расстояние всех точек
кольца от оси равно r.
Для
каждого отдельно взятого кольца момент
инерции
![]() где
,
где
,
![]() —
масса всего кольца.Объем
кольца
—
масса всего кольца.Объем
кольца
![]() .
Если
плотность материала
диска
.
Если
плотность материала
диска
![]() ,
то масса кольца
,
то масса кольца![]() .
.
Момент
инерции кольца
![]() .Чтобы
подсчитать момент инерции всего диска,
надо просуммировать моменты инерции
колец от центра
диска (
.Чтобы
подсчитать момент инерции всего диска,
надо просуммировать моменты инерции
колец от центра
диска (![]() )
до края его(r=R),
)
до края его(r=R),
т. е. вычислить интеграл:
![]()
или
![]()
Но
масса диска
![]() ,
следовательно,
,
следовательно,
![]()
Приведем (без вычисления) моменты инерции для некоторых тел правильной
геометрической формы, выполненных из однородных материалов (рис. 5).
1. Момент инерции тонкого кольца относительно оси, проходящей через его центр перпендикулярно его плоскости (или тонкостенного полого цилиндра относительно его оси симметрии):
![]()
2. Момент инерции толстостенного цилиндра относительно оси симметрии:
![]()
где
![]() —
внутренний иR2—
внешний радиусы.
—
внутренний иR2—
внешний радиусы.
3. Момент инерции диска относительно оси, совпадающей с одним из его диаметров:
![]()
4. Момент инерции сплошного цилиндра относительно оси, перпендикулярной образующей и проходящей через ее середину:
![]() ,
,
где R — радиус основания цилиндра, h — высота цилиндра
5. Момент инерции тонкого стержня относительно оси, проходящей через его середину:
![]() ,
,
где
![]() —
длина стержня.
—
длина стержня.
6 Момент инерции тонкого стержня относительно оси, проходящей через один из его концов:
![]()
7. Момент инерции шара относительно оси, совпадающей содним из его диаметров:
![]()

рис.№5 К расчёту моментов инерции различных тел:
1—кольца относительно оси, проходящей через центр перпендикулярно его плоскости; 2 — полого цилиндра относительно оси симметрии, параллельной образующим; 3 — тонкого диска относительно оси, совпадающей с диаметром; 4 — сплошного цилиндра относительно оси симметрии, перпендикулярной образующим; 5 — однородного стержня относительно оси, проходящей через середину перпендикулярно к нему; 6 — однородного стержня относительно оси, проходящей через конец стержня; 7 — шара относительно оси, совпадающей с диаметром.
Если известен момент инерции какого-либо тела относительно оси, проходящей через его центр масс, то момент инерции относительно любой другой оси, параллельной первой, может быть найден на основании так называемой теоремы Гюйгенса:
Момент
инерции тела J
относительно любой оси равен
моменту инерции тела
![]() относительно
оси, параллельной
данной и проходящей через центр масс
тела,
плюс масса тела т, умноженная на квадрат
расстояния
относительно
оси, параллельной
данной и проходящей через центр масс
тела,
плюс масса тела т, умноженная на квадрат
расстояния
![]() между осями:
между осями:
![]()
Кинетических энергия твердого тела конечных размеров равна сумме кинетических энергий элементов, на которые расчленено тело. В общем случае тело может двигаться поступательно и одновременно вращаться. Рассмотрим частный случай вращения тела
вокруг неподвижной оси.
Кинетическая энергия каждого элемента тела:
![]() (**)
(**)
де
mi—масса
![]() -го
элемента тела,
-го
элемента тела,![]() —
его линейная скорость .
—
его линейная скорость .
Если
расстояние центра элемента от оси
вращения
![]() то,
принимая
во внимание, что
то,
принимая
во внимание, что
![]() ,
равенство (**) перепишем в виде:
,
равенство (**) перепишем в виде:
![]()
и, просуммировав по всем элементам, получим:
![]()
Но
так как
![]() —
момент инерции
тела относительно выбранной оси,
то
—
момент инерции
тела относительно выбранной оси,
то
![]()
Эта формула отличается от соответствующей формулы для поступательного движения тем, что вместо линейной скорости в ней стоит угловая скорость, а вместо массы — момент инерции.
Рассмотрим изменение кинетической энергии вращающегося тела под действием сил. Положим, тело вращается вокруг неподвижной оси 00. Пусть результирующая сила F, приложенная в точке А тела, отстоящей от оси на расстоянии r, лежит в плоскости траектории точки и направлена по касательной к ней (рис. 6).

рис.№6 К расчету работы при вращательном движении.
При
повороте тела на угол
![]() точка приложения силы переместится
на длину дуги
точка приложения силы переместится
на длину дуги
![]() .
Если угол достаточно мал, то дугуds
можно
считать равной перемещению ds.
Тогда
.
Если угол достаточно мал, то дугуds
можно
считать равной перемещению ds.
Тогда
элементарная работа силыF на пути ds:
![]()
но
![]() ,
,
![]()
Так как
![]()
то
![]()
Полная
работа при повороте на угол
![]() :
:
![]()
Если момент равнодействующей всех сил — величина постоянная, то из последнего соотношения получим:
![]()
При вращательном движении работа измеряется произведением момента силы на угол поворота тела.
Если момент силы меняется со временем, то работа измеряется интегралом от момента силы по углу поворота.
Напишем основное уравнение динамики вращательного движения:
Для
подсчета работы умножим обе части
равенства на угол поворота
![]() где
где![]() —угловая
скорость вращения иdt—весьма
малый интервал времени , в пределах
которого можно считать М=const:
—угловая
скорость вращения иdt—весьма
малый интервал времени , в пределах
которого можно считать М=const:
![]()
Проинтегрировав левую и правую части последнего равенства, получи:

Т.е. изменение кинетической энергии тела при вращательном движении равно работе сил, момент которых сообщает телу угловое ускорение.
Полная кинетическая энергия твердого тела равна сумме кинетической энергии поступательного движения центра масс тела и кинетической энергии вращения тела:
![]() ,
,
где
![]() —
скорость поступательного движения
центра масс,J—момент
инерции тела относительно оси вращения
,
проходящей через центр масс,
—
скорость поступательного движения
центра масс,J—момент
инерции тела относительно оси вращения
,
проходящей через центр масс,
![]() —угловая
скорость вращения тела вокруг своей
оси.
—угловая
скорость вращения тела вокруг своей
оси.
Лекция11.
Понятие о твердом теле, которое вращается вокруг неподвижной точки. Свободные оси вращения. Гироскоп. Условия равновесия твердого тела. Виды равновесия.
При поступательном
движении все точки твердого тела
совершают равные перемещения за один
и тот же промежуток времени. Поэтому
скорости и ускорения всех точек тела в
данный момент времени одинаковы. Этот
факт позволяет свести изучение
поступательного движения твердого тела
к изучению движения отдельной частицы
тела, т. е. к задаче кинематики частицы.
Таким образом, поступательное движение
твердого тела может быть полностью
описано, если известны зависимость от
времени радиус-вектора
![]() любой
точки этого тела и его положение в
начальный момент.
любой
точки этого тела и его положение в
начальный момент.
Рассмотрим
вращение твердого тела вокруг неподвижной
оси
![]() .
.
.
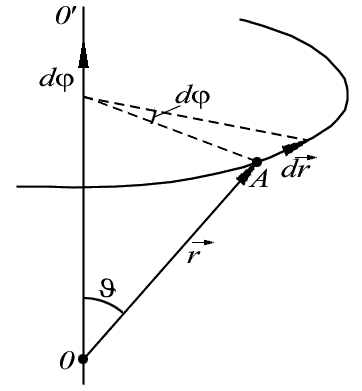
РИС.№1 Вращение твердого тела вокруг неподвижной оси.
Пусть
твердое тело, вращаясь вокруг нее,
совершило за время
![]() бесконечно малый поворот. Угол поворота
будем характеризовать вектором
бесконечно малый поворот. Угол поворота
будем характеризовать вектором![]() ,модуль
которого равен углу поворота
,модуль
которого равен углу поворота
![]() ,
а направление совпадает с осью 00',
причем так, что направление поворота
отвечает правилу правого
винта по отношению к направлению вектора
,
а направление совпадает с осью 00',
причем так, что направление поворота
отвечает правилу правого
винта по отношению к направлению вектора
![]() (рис.1). Вектор
(рис.1). Вектор![]() называетсяаксиальным
вектором, тогда
как вектор перемещения
называетсяаксиальным
вектором, тогда
как вектор перемещения
![]() являетсяполярным
вектором (к ним
также относятся векторы скорости и
ускорения). Они отличаются тем, что
полярный вектор кроме длины и направления
имеет точку приложения (полюс), а
аксиальный вектор имеет только длину
и направление, но не имеет точки
приложения. Векторы такого типа часто
применяются в физике. К ним, например,
относятся все вектора, являющиеся
векторным произведением двух полярных
векторов.
являетсяполярным
вектором (к ним
также относятся векторы скорости и
ускорения). Они отличаются тем, что
полярный вектор кроме длины и направления
имеет точку приложения (полюс), а
аксиальный вектор имеет только длину
и направление, но не имеет точки
приложения. Векторы такого типа часто
применяются в физике. К ним, например,
относятся все вектора, являющиеся
векторным произведением двух полярных
векторов.
Найдем
элементарное перемещение любой частицы
А твердого тела при таком повороте.
Положение частицы А зададим радиус-вектором
![]() ,
проведенным из некоторой точки О на оси
вращения. Тогда линейное перемещение
конца радиус-вектора
,
проведенным из некоторой точки О на оси
вращения. Тогда линейное перемещение
конца радиус-вектора![]() связано
с углом поворота
связано
с углом поворота![]() соотношением
(рис. 2.6)
соотношением
(рис. 2.6)
![]()
или
в векторном виде![]()
Заметим,
что это равенство справедливо лишь для
бесконечно малого поворота
![]() ,то
есть только бесконечно малые повороты
можно рассматривать как векторы. Для
конечного поворота на угол
,то
есть только бесконечно малые повороты
можно рассматривать как векторы. Для
конечного поворота на угол![]() линейное перемещение частицы А
определяется формулой:
линейное перемещение частицы А
определяется формулой:

Очевидно,
что перемещение нельзя представить как
векторное произведение векторов
![]() и
и![]() ,
так как это возможно лишь при бесконечно
малом повороте
,
так как это возможно лишь при бесконечно
малом повороте![]() ,
когда радиус-вектор
,
когда радиус-вектор![]() можно
считать неизменным.
можно
считать неизменным.
Можно
показать, что введенный вектор
![]() удовлетворяет
основному свойству векторов - векторному
сложению. Пусть твердое тело совершает
два элементарных поворота
удовлетворяет
основному свойству векторов - векторному
сложению. Пусть твердое тело совершает
два элементарных поворота![]() 1
и
1
и
![]() 2
вокруг разных осей, проходящих через
неподвижную точку О. Тогда суммарное
перемещение
2
вокруг разных осей, проходящих через
неподвижную точку О. Тогда суммарное
перемещение
![]() произвольной
частицы А тела, радиус-вектор которой
относительно точки О равен
произвольной
частицы А тела, радиус-вектор которой
относительно точки О равен![]() ,
можно представить так:
,
можно представить так:
![]() ,
,
где![]()
Мы
доказали, что два поворота,
![]() 1
и
1
и
![]() 2,
эквивалентны одному повороту на угол
2,
эквивалентны одному повороту на угол
![]() вокруг
оси, совпадающей с вектором
вокруг
оси, совпадающей с вектором![]() и
проходящей через точку О.
и
проходящей через точку О.
Введем
теперь векторы угловой скорости и
углового ускорения таким же способом,
как мы вводили векторы
![]() и
и![]() .
Вектор угловой скорости
.
Вектор угловой скорости![]() определяют
так
определяют
так![]()
где
dt - интервал времени, за который тело
совершает поворот
![]() .
Вектор
.
Вектор![]() совпадает
по направлению с вектором
совпадает
по направлению с вектором![]() и
является аксиальным вектором.
и
является аксиальным вектором.
Изменение
вектора
![]() со
временем характеризуют вектором углового
ускорения
со
временем характеризуют вектором углового
ускорения![]() ,
который определяют соотношением
,
который определяют соотношением![]() ,
,
Направление
вектора
![]() совпадает
с направлением
совпадает
с направлением![]() -
приращения угловой скорости
-
приращения угловой скорости![]() .
Вектор
.
Вектор![]() ,
как и
,
как и![]() ,
также аксиальный.
,
также аксиальный.
Представление угловой скорости и углового ускорения в виде векторов очень полезно при изучении более сложных движений твердого тела. Это позволяет во многих случаях получить большую наглядность, а также резко упростить как анализ движения, так и соответствующие расчеты.
Представим выражения для угловой скорости и углового ускорения в проекциях на ось вращения Оz, положительное направление которой свяжем правилом правого винта с положительным направлением отсчета координаты (рис. 2).
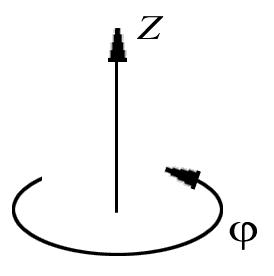
РИС.№2 Введение понятия угловых векторов
Тогда
проекции
![]() и
и![]() векторов
векторов![]() и
и![]() на
ось
на
ось![]() определяются
формулами:
определяются
формулами:
![]()
![]() (*)
(*)
В этих формулах
![]() и
и![]() -
алгебраические величины. Их знак
характеризует направление соответствующего
вектора. Например, если
-
алгебраические величины. Их знак
характеризует направление соответствующего
вектора. Например, если![]() ,
то направление вектора
,
то направление вектора![]() совпадает
с положительным направлением оси z. Если
совпадает
с положительным направлением оси z. Если![]() ,
то и направление вектора
,
то и направление вектора![]() противоположно.
Аналогично правило верно для углового
ускорения.
противоположно.
Аналогично правило верно для углового
ускорения.
По
известной зависимости
![]() ,
называющейсязаконом
вращения тела,
формулы (*) дают возможность определить
угловую скорость и угловое ускорение
в любой момент времени. Из зависимости
углового ускорения от времени и начальных
условий, т. е. угловой скорости
,
называющейсязаконом
вращения тела,
формулы (*) дают возможность определить
угловую скорость и угловое ускорение
в любой момент времени. Из зависимости
углового ускорения от времени и начальных
условий, т. е. угловой скорости
![]() и
угла ( в начальный момент времени, можно
найти
и
угла ( в начальный момент времени, можно
найти![]() и
и![]() .
.
Пусть
твердое тело вращается вокруг неподвижной
оси по закону
![]() ,
где
,
где![]() и
и![]() -
некоторые положительные постоянные.
Определим движения тела.
-
некоторые положительные постоянные.
Определим движения тела.
Согласно
(*) ,
![]() .
Из этих соотношений видно, что тело
вращается равнозамедленно (
.
Из этих соотношений видно, что тело
вращается равнозамедленно (![]() ),
останавливается в момент времени
),
останавливается в момент времени![]() ,
а затем начинает вращаться в противоположном
направлении (
,
а затем начинает вращаться в противоположном
направлении (![]() ).
).
Легко
заметить, что все задачи на вращение
твердого тела вокруг неподвижной оси
аналогичны по форме задачам на
прямолинейное движение частицы.
Достаточно заменить линейные величины
x,
![]() и
и![]() на
соответствующие угловые
на
соответствующие угловые![]() ,
,![]() и
и![]() ,
как получаются все закономерности и
соотношения для вращающегося тела.
,
как получаются все закономерности и
соотношения для вращающегося тела.
Связанные с телом оси, при вращении относительно которых динамические реакции опор равны статическим, называются свободными осями.
Теоретическое исследование показывает, что в любом теле произвольной формы существуют три взаимно перпендикулярные оси, проходящие через центр масс тела, которые могут служить свободными осями вращения. Их называют главными осями инерции.
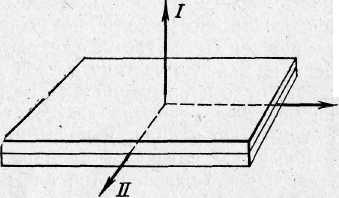
рис. № 3 Главные оси вращения параллелепипеда.
Тело, вращающееся вокруг свободной оси, в отсутствие момента внешних сил относительно центра тяжести должно вращаться неограниченно долго, сохраняя неизменным положение оси. Однако создать вращение точно вокруг главной оси практически не удается, так как центр масс оказывается, хотя и ненамного, смещенным относительно оси вращения. При больших скоростях вращения даже небольшое смещение может создать значительные динамические нагрузки.
Поэтому существенным является вопрос об устойчивости вращения вокруг главных осей, т. е. вопрос о том, будет ли возникшее малое уклонение от вращения вокруг свободной оси в дальнейшем возрастать или тело будет стремиться под действием возникших динамических реакций вернуться к вращению вокруг главной оси. Устойчивость того или другого конкретного вида движения — сложнейший вопрос механики, для поисков ответа на который пока еще не существует единого метода.
В теоретической механике показано, что в отсутствие внешних сил устойчиво вращение относительно главных осей, соответствующих наибольшему и наименьшему моментам инерции тела. Вращение вокруг главной оси, соответствующей среднему моменту инерции, неустойчиво.
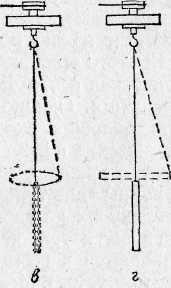
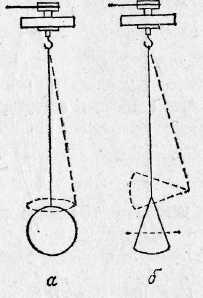
рис. № 4 Вращение вокруг главных осей инерции.
Подвешенная за один из концов палочка при малых скоростях вращается в вертикальном положении (рис.4, г), т. е. вокруг оси с наименьшим моментом инерции. При возрастании скорости палочка вопреки действию силы тяжести располагается горизонтально и устойчиво вращается вокруг оси с наибольшим моментом инерции.
Вообще, практически оказывается, что вращение устойчиво вокруг оси с наибольшим моментом инерции. Это связано с влиянием внешних сил, в частности сил трения, которые создают момент относительно центра тяжести. Действие этого момента в случае вращения вокруг оси с наибольшим моментом инерции оказывается меньшим.
Ось с наименьшим моментом инерции интересна тем, что относительно нее легче всего создать вращение.
Падающая кошка, например , как известно, из любого положения встает на лапки. Для этого кошка в воздухе вращает хвостом и лапками так, чтобы в силу закона сохранения момента количества движения повернуться вокруг горизонтальной оси, относительно которой у кошки наименьший момент инерции.
При изучении вращения твердого тела, имеющего закрепленную точку, следует различать не совпадающие друг с другом: 1) ось вращения тела; 2) мгновенную ось вращения; 3) направление, или ось момента количества движения. Даже рассматриваемый частный случай движения тела, имеющего неподвижную точку, довольно сложен. Мы ограничимся приближенным изучением одного, еще более частного, но имеющего широкое научное и техническое применение случая. Рассмотрим приближенную теорию гироскопа.
Гироскопом называют массивное однородное тело вращения, быстро вращающееся относительно одной из главных осей инерции.
Из определения следует, что гироскоп обладает осью симметрии (поскольку он является телом вращения), которая служит одной из главных осей инерции (поскольку материал гироскопа однороден). Обычно за ось вращения гироскопа выбирается главная ось инерции, которой соответствует максимальный момент инерции. Эту ось будем называть осью гироскопа.
Допустим,
ось гироскопа при его вращении остается
неподвижной.
Следовательно, вектор мгновенной угловой
скорости
![]() лежит на
этой оси. Вектор момента количества
движения
лежит на
этой оси. Вектор момента количества
движения
![]() также
направлен вдоль оси гироскопа. Таким
образом, ось гироскопа, мгновенная
ось вращения и ось момента количества
движения в этом случае
совпадают. В реальных условиях ось
гироскопа лишь приближенно
может считаться главной осью инерции,
так как центр масс
гироскопа всегда хоть немного смещен
относительно оси симметрии.
Кроме того, как мы увидим ниже, ось не
может оставаться неподвижной,
не будучи закрепленной в подшипниках,
так как мы не
в силах полностью избавиться от трения.
также
направлен вдоль оси гироскопа. Таким
образом, ось гироскопа, мгновенная
ось вращения и ось момента количества
движения в этом случае
совпадают. В реальных условиях ось
гироскопа лишь приближенно
может считаться главной осью инерции,
так как центр масс
гироскопа всегда хоть немного смещен
относительно оси симметрии.
Кроме того, как мы увидим ниже, ось не
может оставаться неподвижной,
не будучи закрепленной в подшипниках,
так как мы не
в силах полностью избавиться от трения.
Положим,
гироскоп имеет очень большую угловую
скорость вращения
![]() вокруг
собственной оси ОО1
и
в то же время ось медленно
вращается с угловой скоростью
вокруг
собственной оси ОО1
и
в то же время ось медленно
вращается с угловой скоростью
![]() вокруг неподвижной вертикальной
оси
вокруг неподвижной вертикальной
оси
![]() (рис.5).
(рис.5).

Направление
мгновенной оси вращения определяется
вектором мгновенной угловой скорости
результирующего
вращения
![]() .
Как видно из чертежа (вследствиетого,
что
.
Как видно из чертежа (вследствиетого,
что![]() ),
мгновенная ось вращения лежит вблизи
оси гироскопа.
),
мгновенная ось вращения лежит вблизи
оси гироскопа.
Построив
вектор момента количества движения
![]() ,
,
где
![]() и
и
![]() —
моменты инерции гироскопа относительносоответствующих
осей, можно убедиться, что и ось момента
количества движения лежит вблизи
оси гироскопа (рис.5)
(При построении вектора
—
моменты инерции гироскопа относительносоответствующих
осей, можно убедиться, что и ось момента
количества движения лежит вблизи
оси гироскопа (рис.5)
(При построении вектора
![]() надо
иметь в виду, что
хотя
надо
иметь в виду, что
хотя![]() и
и![]() имеют разную величину, однако
порядок их величины одинаков.)
имеют разную величину, однако
порядок их величины одинаков.)
рис.№5. Вращение тела вокруг оси, закрепленной в одной точке , когда скорость вращения тела много больше скорости обращения.
Таким образом, при вращении реального гироскопа ось его, мгновенная ось вращения и ось момента количества движения хотя и не совпадают, но расхождение их направлений незначительно.
В основу приближенной теории гироскопа, которую мы рассмотрим ниже, кладется допущение, что все три указанные оси совпадают и неизменно связаны друг с другом. Другими словами, если мы видим, что ось гироскопа как-то изменяет свое положение в пространстве, мы считаем себя вправе сделать заключение, что также меняется в пространстве направление мгновенной угловой скорости вращения гироскопа и оси его момента количества движения.
И
обратно, установив, что в силу каких-то
причин (о них будет сказано
ниже) вектор момента количества движения
должен изменить свое положение, мы
будем считать, что вместе с ним изменит
свое
положение и ось гироскопа.
Уравнение
![]() ,
для случая вращения телавокруг
неподвижной оси, справедливо и для
движения гироскопа. Доказательство
этого утверждения можно найти в курсе
теоретической механики.
,
для случая вращения телавокруг
неподвижной оси, справедливо и для
движения гироскопа. Доказательство
этого утверждения можно найти в курсе
теоретической механики.
Из
равенства
![]() следует, что вектор момента количествадвижения
изменяется только при действии на
гироскоп момента внешних,
сил. И так как мы допускаем, что ось
гироскопа и ось момента
количества движения жестко связаны, мы
можем утверждать,
что и перемещение оси гироскопа происходит
пока действует момент
внешних сил.
следует, что вектор момента количествадвижения
изменяется только при действии на
гироскоп момента внешних,
сил. И так как мы допускаем, что ось
гироскопа и ось момента
количества движения жестко связаны, мы
можем утверждать,
что и перемещение оси гироскопа происходит
пока действует момент
внешних сил.
Чтобы сделать вращение гироскопа свободным от влияния внешних сил, необходимо свести к минимуму силы трения, действующие на гироскоп, и устранить действие силы тяжести. Уменьшение силы трения достигается особой конструкцией и обработкой оперных подшипников, в которые помещается ось гироскопа. Для устранения действия силы тяжести гироскоп заставляют вращаться вокруг оси, проходящей через центр масс. Тогда результирующая силы тяжести все время лежит на оси вращения, и момент ее равен нулю.
Свободный гироскоп имеет форму «колокольчика» с утяжеленным краем (рис. 6).
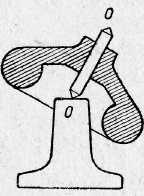
Центр тяжести такого гироскопа находится внутри «колокольчика», и с ним совмещается конец оси 00. В технике чаще всего при создании свободного гироскопа используется карданов подвес ( рис.№7)
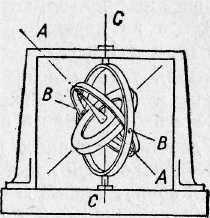 рис.№7 Гироскоп
на кардановом подвесе.
рис.№7 Гироскоп
на кардановом подвесе.

связывают
координаты x,
у, z
центра
масс тела с составляющими результирующей
внешних сил
![]() по
осям х,
у, z.
по
осям х,
у, z.
Другие три уравнения, полученные из основного закона динамики вращающегося твердого тела:

связывают углы поворота тела вокруг осей x, у, z с моментами внешних сил относительно тех же осей.
Для того чтобы тело находилось в равновесии, т. е. не перемещалось вдоль осей и не вращалось вокруг них, необходимо выполнение следующих шести условий:

Для равновесия твердого тела, находящегося под действием произвольной системы сил, необходимо, чтобы сумма проекций всех сил на оси координат и сумма моментов этих сил относительно осей координат были равны нулю.
Если в данный момент тело находится в равновесии, то это не служит гарантией того, что оно останется в таком состоянии как угодно долго. В реальных условиях на всякое тело действуют случайные толчки, устранить которые принципиально невозможно. Чтобы выяснить, могут ли эти толчки вывести тело из состояния равновесия или нет, надо исследовать, как изменяется результирующая сил, действующих на тело, при малом его отклонении от положения равновесия.
Положим,
тело (шарик) находится в покое на дне
гладкой ямы (рис.
7), в нижней точке которой на него действуют
равные и противоположно направленные
силы mg
и R
(их
результирующая равна нулю).
Отклоним шарик от положения равновесия.
Теперь на него действует
результирующая F
сил
mg
и
![]() ,уже
не равная нулю. Она направлена
к положению равновесия, куда и возвратит
шарик, когда перестанет
действовать отклоняющий фактор. Если
при малом отклонении
тела от положения равновесия результирующая
внешних сил не вызывает увеличения
начального отклонения, то тело находится
в устойчивом
равновесии.
,уже
не равная нулю. Она направлена
к положению равновесия, куда и возвратит
шарик, когда перестанет
действовать отклоняющий фактор. Если
при малом отклонении
тела от положения равновесия результирующая
внешних сил не вызывает увеличения
начального отклонения, то тело находится
в устойчивом
равновесии.
Положим, шарик находится в равновесии на вершине" гладкого купола (рис. 8). При этом силы, mg и R опять уравновешивают друг друга, и их результирующая равна нулю. При малейшем отклонении шарика от положения равновесия возникает результирующая F, отличная от нуля и удаляющая шарик от положения равновесия.
Если результирующая сила, возникающая при отклонении тела от положения равновесия, увеличивает начальное отклонение, равновесие тела называется неустойчивым.
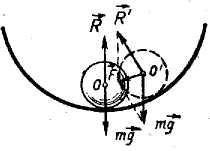

рис.№7 Устойчивое равновесие. Рис.№8 Неустойчивое равновесие.
Состояние равновесия системы тел, на которую действуют внешние консервативные силы, устойчиво только в том случае, если ему соответствует минимум потенциальной энергии.
Допустим, что система, находящаяся под действием консервативных сил в состоянии равновесия, обладает минимумом потенциальной энергии. Значит, при любом отклонении от этого положения ее потенциальная энергия возрастает. Но в соответствии с законом сохранения энергии полная энергия консервативной системы, равная сумме кинетической Еk и потенциальной U энергии, остается постоянной:
![]() U=const.
U=const.
Следовательно,
если в начальный момент времени все
тела системы находились
в покое, то движение может возникнуть
лишь как результат
перехода части потенциальной энергии
в кинетическую {так
как всегда
![]() >0).
Если же в начальный момент потенциальнаяэнергия
минимальна, то движение возникнуть не
может и система находится
в состоянии устойчивого равновесия.
>0).
Если же в начальный момент потенциальнаяэнергия
минимальна, то движение возникнуть не
может и система находится
в состоянии устойчивого равновесия.
При безразличном равновесии потенциальная энергия одинакова для близких положений тел системы.
В поле силы тяжести тело обладает минимумом потенциальной энергии, когда его центр тяжести занимает наинизшее положение. Таким образом, состояние устойчивого равновесия тела в поле силы тяжести соответствует наинизшему положению его центра тяжести.
Лекция 12.Закон тяготения Ньютона, постоянная тяготения и ее измерение. Гравитационная и инертная масса тела. Понятие о поле тяготения. Гравитационное поле. Однородное и центральное поле. Напряженность и потенциал поля тяготения.
Закон всемирного тяготения.
Сам факт существования в природе гравитационного взаимодействия (называемого еще всемирным тяготением) и закон, которому подчиняется это взаимодействие, были открыты Ньютоном и опубликованы им в 1686 г. в упоминавшемся уже труде «Математические начала натуральной философии».
Всемирное тяготение состоит в том, что всем телам природы присуще свойство притягивать друг друга. Закон всемирного тяготения формулируется так. Сила взаимного притяжения двух материальных точек прямо пропорциональна произведению масс взаимодействующих точек и обратно пропорциональна квадрату расстояния между ними:
![]() (1)
(1)
где![]() — коэффициент пропорциональности,
зависящий от выбора единиц измерения
входящих в формулу величин.
— коэффициент пропорциональности,
зависящий от выбора единиц измерения
входящих в формулу величин.
Взаимодействие неточечных (протяженных) тел представляет собой суммарный результат взаимодействия между отдельными элементами (точками) взаимодействующих тел.
Рис.1
Гениальность Ньютона проявилась здесь в том, что он поставил и правильно решил такой вопрос: есть ли взаимное притяжение протяженных тел их свойство как протяженных тел или же оно есть результат взаимодействия составляющих эти тела элементов масс. Ньютон ответил на этот вопрос гениальной догадкой в пользу последнего и поэтому сформулировал свой закон для материальных точек. Не имея этого фундаментального закона, трудно было бы разобраться во взаимодействиях протяженных тел, так как в этом случае сила взаимодействия зависит также от размеров и формы тел.
Закону
всемирного тяготения (1) можно придать
векторную форму. Для этого договоримся
определять положение второй
материальной точки, относительно первой,
радиус-вектором![]() ,
проведенным от т1
к m2
(рис.1).
,
проведенным от т1
к m2
(рис.1).
Введем
единичный вектор
![]() вдоль
вектора
вдоль
вектора![]() .
Тогда
.
Тогда
![]()
Очевидно, что сила, с которой точка массы т1 действует на точку массы m2, запишется так:
![]() .
.
где
знак минус указывает на то, что вектор
![]() противоположен вектору
противоположен вектору![]() .
Таким образом, силу
.
Таким образом, силу
![]() можно записать в векторной форме
следующим образом:
можно записать в векторной форме
следующим образом:
![]() (2)
(2)
Рассказывают, будто упавшее с дерева яблоко навело Ньютона на размышления, которые привели к открытию закона всемирного тяготения. Возможно, что это и так. Но бесспорно, что при таком (или подобном) наблюдении Ньютону пришла удивительная мысль: не является ли сила, удерживающая Луну на орбите, силой той же природы, что и сила, заставляющая тело падать на поверхность Земли, но лишь ослабленной за счет расстояния? Сопоставляя центростремительное ускорение Луны и ускорение свободного падения тел на поверхности Земли, Ньютон немедленно пришел к выводу, что если причинa падения тел на Землю и движения Луны одна и та же и состоит во взаимном притяжении тел, то сила, с которой тело притягивается к Земле, должна быть обратно пропорциональна квадрату расстояния до центра Земли. Распространив гипотезу о притяжении между телами на все тела солнечной системы, Ньютон смог объяснить, почему движение планет подчиняется трем законам Кеплера, почему этим же законам подчиняется движение спутников около планет (спутники Марса, Юпитера, Земли). На основе закона всемирного тяготения Ньютон также объяснил движение комет, образование морских приливов на Земле, возмущения в движении Луны. Далее Ньютон сделал обобщающее предположение, что взаимное притяжение тел — универсальное свойство и проявляется во всем окружающем нас мире. То, что взаимное тяготение тел не наблюдалось в обычных условиях нашей жизни (между окружающими нас телами), объясняется только тем, что сила взаимного притяжении для тел с небольшой массой очень мала и в обычных условиях перекрывается другими силами (например, трением). Однако, если создать специальные условия, устраняющие трение, можно обнаружить и силы взаимного притяжения обычных тел. Это впервые проделал Кавендиш.
Ньютон опубликовал свой закон лишь спустя 16 лет после его открытия, когда ему удалось с помощью изобретенного им метода интегрального исчислении (а также для «убедительности» и элементарным путем) решить задачу о силе взаимодействия тонкого сферического слоя с материальной точкой, находящейся вне сферы.
Он показал, что сферический слой притягивает внешнюю точку массы т так, как если бы вся масса М этого слоя была сосредоточена в центре сферы:
![]()
где r — расстояние материальной точки от центра сферы.
Из этого результата вытекает, что однородное тело шаровой формы притягивает внешнюю материальную точку так, как если бы вся его масса была сосредоточена в центре шара. Два же однородных шара притягиваются так, как если бы массы обоих шаров были сосредоточены в их центрах. Это значит, что шары взаимодействуют как материальные точки, массы которых равны массам шаров.