

442
.pdfФедеральное агентство по образованию Государственное образовательное учреждение высшего профессионального образования «Воронежская государственная лесотехническая академия»
Математическое моделирование при проектировании лесных машин
Методические указания к выполнению практических работ для студентов специальности
150405 – Машины и оборудование лесного комплекса
Воронеж 2009
2
УДК 630*:51+630*:65.011.54
Бухтояров, Л. Д. Математическое моделирование при проектировании лесных машин [Текст] : метод. указания к выполнению практических работ для студентов специальности 150405 – Машины и оборудование лесного комплекса / Л. Д. Бухтояров, П. И. Попиков, Р. В. Юдин ; Фед. агентство по образованию, ГОУ ВПО «ВГЛТА». – Воронеж, 2009. – 95 с.
Печатается по решению учебно-методического совета ГОУ ВПО «ВГЛТА» (протокол № 8 от 11 июня 2009 г.)
Научный редактор заведующий кафедрой механизации лесного хозяйства и проектирования машин ГОУ ВПО «ВГЛТА», д-р техн. наук, проф. М.В. Драпалюк
3
1. ИССЛЕДОВАНИЕ КИНЕМАТИКИ ГИБКОГО РАБОЧЕГО ОРГАНА КУСТОРЕЗА
1.1. Основные положения и методические указания
В процессе срезания поросли рабочий орган совершает одновременно вращательное и переносное поступательное движение. Поступательное движение определяет величину подачи рабочего органа при срезании растений. Рабочий орган кустореза описывает траекторию, вид которой зависит от соотношения скоростей резания v и подачи un, равной скорости движения трактора, а также от положения оси ротора относительно обрабатываемого материала.
Траекторией движения любой точки гибкого рабочего органа кустореза в горизонтальной плоскости будет являться циклоида, описываемая системой параметрических уравнений [1]:
x = u |
п |
t ± r sin(ω t); |
(1.1) |
|
cos(ω t), |
||
y = r |
|
||
где x, y, – координаты вершины гибкого рабочего органа, м; uп – поступательная скорость трактора, м/с;
r – длина гибкого рабочего органа, м;
ω – угловая скорость гибкого рабочего органа, с-1;
t – время поворота гибкого рабочего органа на угол ωt, с. Поступательная скорость трактора на порядок меньше линейной скорости
любой точки гибкого рабочего органа, поэтому она не оказывает значительного влияния на его траекторию движения, и ею можем пренебречь. Учитывая возможность перемещения точек рабочего органа в вертикальной плоскости (биение гибкого рабочего органа), систему (1.1) можно преобразовать к виду
x |
k |
= r |
sin(ω |
k |
t); |
|
|
|
k |
|
|
|
|
||
yk |
= rk |
cos(ωk |
t); |
(1.2) |
|||
z |
k |
= r |
sin(ω |
k _ b |
t), |
|
|
|
k |
|
|
|
|||
где xк, yк, zк – координаты k-ой точки гибкого рабочего органа, м;
rк – длина рабочего органа от места крепления до его k-ой точки, м;
4
ωк – угловая скорость k-ой точки гибкого рабочего органа в горизонтальной плоскости, с-1;
ωk_b – угловая скорость отклонения k-ой точки гибкого рабочего органа в вертикальной плоскости оси, с-1.
Далее представим гибкий рабочий орган как систему материальных точек, имеющих возможность перемещения относительно друг друга. Так как мы рассматриваем работу гибкого рабочего органа в трёхмерном пространстве, то координаты, определяющие его положение, в соответствии с рис. 1.1, находим как проекции точек на соответствующие оси:
x |
k |
= r |
sin(ω |
k |
t) cos(ω |
к−1 |
t −ω |
к |
t); |
|
|
k |
|
|
|
|
(1.3) |
||||
yk |
= rk |
cos(ωk |
t) cos(ωк−1 t −ωк t); |
|||||||
|
|
= |
(xk − xk −1 )2 + ( yk − yk −1 )2 sin(ωk _ b |
t). |
||||||
zk |
||||||||||
а) Общий вид ротора кустореза с гибкими рабочими органами
б) Проекции материальных точек рабочего органа в плоскости ХОZ
в) Проекции материальных точек рабочего органа в плоскости YOZ
Рис. 1.1 Схема ротора кустореза с гибкими инерционно-рубящими рабочими органами
5
Наложим на эту систему связи, позволяющие вращаться каждой точке относительно друг друга, но не позволяющие изменять длину рабочего органа. Для этого вычислим длину рабочего органа на основании системы (1.3):
Rk = (xk − xk −1 )2 + ( yk − yk −1 )2 + (zk − zk −1 )2 . (1.4)
После чего введём в эту систему коэффициент, позволяющий масштабировать координаты точек; он будет равен отношению постоянной длины гибкого рабочего органа rk к длине, получаемой после приращения углов поворота его точек Rk.
xkykzk
= rk |
sin(ωk |
t) cos(ωк−1 |
t −ωк |
t) rk |
/ Rk , |
|
|
|
||||||||
= rk cos(ωk |
t) cos(ωк−1 |
t −ωк |
t) rk |
/ Rk , |
|
|
(1.5) |
|||||||||
= |
(x |
k |
− x |
k |
−1 |
)2 + ( y |
k |
− y |
k −1 |
)2 sin(ω |
k _ b |
t) r |
/ R |
k |
. |
|
|
|
|
|
|
|
|
k |
|
|
|||||||
Данная математическая модель позволяет рассчитать траекторию движения гибкого рабочего органа, если известны угловые скорости входящих в него элементов. На основании приведённой математической модели была составлена программа на ЭВМ. В качестве примера результата расчёта программы рассмотрим процесс разгона гибкого рабочего органа, который характеризуется изменением координат точки рабочего органа во времени (рис. 1.2).
Этот график построен для материальной точки гибкого рабочего органа, находящейся на расстоянии 0,6 м. от оси ротора, на котором он закреплён.
Рис. 1.2 Изменение координат одной из точек рабочего органа
6
На основании полученных в программе данных можно также построить зависимость, которая характеризует биение рабочего органа в плоскости ХОZ (рис. 1.3).
Рис. 1.3 Зависимость аппликаты точки гибкого рабочего органа от абсциссы точки его крепления на роторе кустореза
Аналогично будет выглядеть зависимость, которая характеризует биение рабочего органа в плоскости YОZ (рис. 1.4).
Рис. 1.4 Зависимость аппликаты точки гибкого рабочего органа от ординаты точки его крепления на роторе кустореза
7
Изменение координат точки рабочего органа, с помощью которой он закреплён на роторе, показано на рис. 1.5.
Рис 1.5 Зависимость ординаты точки крепления гибкого рабочего органа на роторе от её абсциссы
Изменение координат точки рабочего органа, изначально отстоящей от оси вала на расстояние 0,6 м., показано на рис. 1.6.
Рис. 1.6 Зависимость ординаты точки гибкого рабочего органа от её абсциссы

8
Из рис. 1.5 следует, что точка крепления гибкого рабочего органа на роторе вращается с постоянным радиусом 0,2 м, величина которого характеризует расстояние от оси ротора, на котором закреплён гибкий рабочий орган.
Из рис. 1.6 следует, что точка, расположенная на гибком рабочем органе и первоначально находящаяся на расстоянии 0,6 м, в процессе разгона постепенно приближается к нулевой координате, характеризующей ось ротора. То есть, за счёт сил инерции угловые скорости материальных точек, составляющих гибкий рабочий орган, будут неодинаковы, и на основании приведённых графиков можно сделать вывод, что гибкий рабочий орган во время разгона будет стремиться к свёртыванию в центре ротора. В этом случае, если длина гибкого рабочего органа будет больше длины радиуса ротора, то возможно захлёстывание рабочих органов друг за друга.
Во время срезания поросли гибкими инерционно-рубящими рабочими органами, в соответствии с рис. 1.7, будет наблюдаться аналогичное их свёртывание, как и во время его разгона, но в меньшей степени.
Рис. 1.7 Зависимость ординаты точки гибкого рабочего органа от её абсциссы (рабочий режим)
9
Из рис. 1.7 следует, что после момента среза поросли происходит уменьшение ширины захвата из-за снижения скорости рабочего органа, а в дальнейшем ширина захвата восстанавливается за счёт ускорения, которое передаётся гибкому рабочему органу от гидропривода.
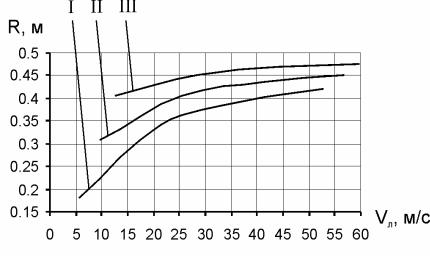
Рис. 1.8 Зависимость габаритного размера рабочего органа от линейной скорости его движения, при снижении этой скорости в результате удара для трёх слу-
чаев: I – ∆Vл=3 м/с; II – ∆Vл=6 м/с; III – ∆Vл=10 м/с
На рис. 1.8. показано изменение ширины захвата в зависимости от скорости рабочего органа, из которого следует, что свёртывание рабочего органа в результате срезания поросли будет незначительным, если частота вращения вала ротора будет более 13,4 с-1. В этом случае линейная скорость режущего элемента рабочего органа, отстоящего от оси вала на расстоянии 0,5 м, будет более
40м/с.
1.2.Пример расчёта положения гибкого рабочего органа в трёхмерном пространстве
Дан гибкий рабочий орган – цепь или трос. Представим его в виде пяти материальных точек, равноудалённых друг от друга, первая материальная точка закреплена на роторе. Определить положение рабочего органа в пространстве при заданных угловых скоростях материальных точек при известной длине рабочего органа и его жёсткости в вертикальной плоскости. Исходные данные для пяти материальных точек сведены в таблицу 1.1
10
Таблица 1.1 Скорость материальных точек в горизонтальной и вертикальной плоскостях и
их расстояния относительно центра вращения
|
k0 |
k1 |
k2 |
k3 |
k4 |
ω |
120 |
115 |
110 |
105 |
100 |
k |
|
|
|
|
|
ωбиен |
0 |
30 |
30 |
30 |
30 |
R |
0,2 |
0,4 |
0,6 |
0,8 |
1 |
Расчёт произведём для момента времени t=0.05 c, коэффициент жесткости гибкого рабочего органа Koeff=0.4. В таблице 1.2 компактно представлены формулы из рассмотренной ранее теоретической части (значения угла под знаком синуса, косинуса необходимо перевести в радианы)
Таблица1.2 Расчеткинематикипятиматериальныхточекгибкогорабочегооргана
k0 |
k1 |
k2 |
k3 |
k4 |
Находим вектор длины
xk = rk sin(ωk t)
yk = yk cos(ωk t)
zk = rk Koeff sin(ωбиенk t)
Находим проекции этих координат
X k |
= xk cos(ωk −1 t −ωk t) |
|
|
|
|
|
|
Х0=х0 |
|
|
|
|
|
|||||||||||||||||
Yk |
= yk cos(ωk −1 t −ωk t) |
|
|
|
|
|
|
Y0=y0 |
|
|
|
|
|
|||||||||||||||||
Zk |
= zk cos(ωбиенk −1 t −ωбиенk t) |
|
|
|
|
|
Z0=z0 |
|
|
|
|
|
||||||||||||||||||
Gip _ XY |
|
|
= |
(X |
k |
− X |
k −1 |
) |
2 + (Y |
−Y |
)2 |
|
|
|
|
Gip _ XY0 = |
|
|
|
|
|
|||||||||
|
k |
|
|
|
|
|
|
|
|
|
|
|
k |
k −1 |
|
|
|
|
|
= R0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Gip _ XZ |
k |
|
|
= Gip _ XZ |
k −1 |
+ |
|
Gip _ XY 2 |
+ (Z |
k |
− Z |
k −1 |
)2 |
Gip _ XZ0 = |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
= R0 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Находимитоговыекоординаты |
|||||
X итог = Х |
|
k |
r |
|
|
/ Gip _ XZ |
k |
|
|
|
|
|
|
X итог = x |
|
|
|
|
||||||||||||
k |
|
|
|
|
|
k −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
0 |
|
|
|
|
||||
Y итог =Y |
|
|
r |
−1 |
/ Gip _ XZ |
k |
|
|
|
|
|
|
|
Y итог = y |
0 |
|
|
|
|
|||||||||||
k |
|
k |
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|||||
Z итог = Z |
k |
|
r |
|
|
/ Gip _ XZ |
k |
|
|
|
|
|
|
|
Z итог = z |
0 |
|
|
|
|
||||||||||
k |
|
|
|
k −1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
||||||
В табл. 2.3 показан результат расчёта по исходным данным