

442
.pdf11
Таблица 2.3
Результат расчета кинематики гибкого рабочего органа
k0 |
k1 |
k2 |
k3 |
k4 |
|
|
|
|
|
|
Находим |
вектор |
длины |
|
|
|
|
|
|
xk |
= rk sin(ωk t) |
|
|
|
|
|
|
-0,06 |
-0,20 |
-0,42 |
|
-0,69 |
-0,96 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
yk |
= yk cos(ωk t) |
|
|
|
|
|
|
0,19 |
0,34 |
0,43 |
|
0,41 |
0,28 |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
zk |
= rk Koeff sin(ωбиенk |
t) |
|
|
0,00 |
0,16 |
0,24 |
|
0,32 |
0,40 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Находим проекции этих |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
координат |
|
|
||
X k |
= xk cos(ωk −1 t −ωk |
t) |
|
|
-0,06 |
-0,20 |
|
-0,41 |
|
-0,67 |
-0,93 |
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Yk |
= yk cos(ωk −1 t −ωk t) |
|
|
0,19 |
0,33 |
|
0,41 |
|
0,40 |
0,27 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Zk |
= zk cos(ωбиенk −1 t −ωбиенk |
t) |
|
0,00 |
0,01 |
|
0,24 |
|
0,32 |
0,40 |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Gip _ XYk |
|
= |
|
( X k |
− X k −1 )2 + (Yk |
− Yk −1 )2 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0,2 |
0,200 |
|
0,227 |
|
0,256 |
0,290 |
Gip_XZ =Gip_XZ |
+ Gip_XY 2 |
+(Z −Z )2 |
|
|
|
|
|
|
|
|||||||||||||
|
k |
|
|
|
|
|
|
|
k−1 |
|
|
|
k |
k |
k−1 |
0,2 |
0,400 |
|
0,722 |
|
0,990 |
1,291 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Находим итоговые |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Координаты |
|
||||
X итог = Х |
k |
r |
|
|
|
/ Gip _ XZ |
k |
|
|
|
|
|
|
|
|
|
||||||
k |
|
|
|
k −1 |
|
|
|
|
|
|
-0,06 |
-0,197 |
|
-0,341 |
|
-0,538 |
-0,719 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Y итог =Y |
|
r |
−1 |
/Gip _ XZ |
k |
|
|
|
|
|
|
|
|
|
|
|||||||
k |
k |
|
k |
|
|
|
|
|
|
|
0,19 |
0,334 |
|
0,342 |
|
0,321 |
0,213 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
Z итог = Z |
k |
|
r |
|
−1 |
/ Gip _ XZ |
k |
|
|
|
|
|
|
|
|
|
|
|||||
k |
|
|
k |
|
|
|
|
|
|
|
0,00 |
0,011 |
|
0,199 |
|
0,258 |
0,309 |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
На рис. 1.9 показаны в трех плоскостях положения пяти материальных точек, т.е. сам рабочий орган.

|
|
|
|
12 |
|
|
|
|
|
|
Вид Спереди - ПлоскостьXZ |
|
|
Вид сбоку - ПлоскостьYZ |
|
|
|||
|
|
|
|
0,40 |
0,40 |
|
|
|
|
|
|
|
|
0,30 |
0,30 |
|
|
|
|
|
|
|
|
0,20 |
0,20 |
|
|
|
|
|
|
|
|
0,10 |
0,10 |
|
|
|
|
|
|
|
|
0,00 |
0,00 |
|
|
|
|
-0,80 |
-0,60 |
-0,40 |
-0,20 |
-0,100,00 |
-0,100,00 |
0,10 |
0,20 |
0,30 |
0,40 |
|
Вид сверху - ПлоскостьXY |
|
|
|
|
|
|
||
|
|
|
|
0,40 |
|
|
|
|
0,30 |
|
|
|
|
0,20 |
|
|
|
|
0,10 |
|
|
|
|
0,00 |
-0,80 |
-0,60 |
-0,40 |
-0,20 |
0,00 |
Рис 1.9 Положение гибкого рабочего органа в пространстве
Таким образом, с учетом режима работы и в рассматриваемый момент времени получено положение гибкого рабочего органа.
1.3Контрольные вопросы
1.Пояснить необходимость использования трехмерной системы координат при составлении математической модели.
2.Что даёт и как рассчитывается коэффициент масштабирования rk/Rk ?
3.Как задать в модели режим работы ротора (ускорение, разгон, холостой
ход)?
4.За счет чего, рабочая зона захвата остается постоянной?

13
2. ИССЛЕДОВАНИЕ ПЕРЕРЕЗАНИЯ СТЕБЛЯ ЛЕЗВИЕМ
2.1. Основные положения и методические указания
При углублении лезвия в слой материала толщиной h (рис 2.1) на величину hсж, когда на его режущей кромке возникает разрушающее контактное на-
пряжение σр, начинается процесс резания. На нож действуют следующие силы: Ррез – сопротивление разрушению материала под кромкой лезвия, направленное вверх; Робж – силы обжатия материалом, имеющие горизонтальные направления и действующие на боковые грани лезвия (возникают они от расширения слоя материала, вызванного внедрением в него клина лезвия); Рсж – сопротивление слоя сжатию фаской лезвия, направленное вверх [1].
а) сопротивления, возникающее при |
б) схема к определению усилий Рсж и Робж |
внедрении лезвия в поросль;
Рис. 2.1 Силовое взаимодействие лезвия с материалом
Таким образом, на фаску лезвия действует сила N, являющаяся суммой проекций сил Робж и Рсж на направление нормали. От нормальной силы N на фаске лезвия возникает сила трения Т2=Nf. Аналогичная сила трения Т1 возни-
кает на другой грани лезвия силы Робж . Т1=Робж f. Вертикальная проекция силы T2′ = T2 cosβ. Подставив значение N, получим
14
|
|
|
1 |
sin 2β + P |
cos2 |
|
(2.1) |
T ′ = f P |
|
β . |
|||||
2 |
|
сж 2 |
обж |
|
|
|
|
В момент начала резания критическая сила Ркррез, приложенная к ножу, должна преодолеть сумму всех сил, действующих в вертикальном направлении,
т.е. |
|
Ркр рез = Ррез + Рсж +Т1 +Т2′ |
(2.2) |
Внашем случае сила Рсж относится к площади и зависимость между εсж и
σподчиняется степенному закону εсж E = σn .
Получаем Рсж
|
|
|
|
|
|
1 |
|
1 |
|
|
||
|
|
1 |
|
|
E |
|
1+ |
|
|
|||
|
|
|
n |
|
||||||||
|
|
|
n tg(β) |
|
||||||||
P |
= |
|
|
|
|
|
|
h |
(2.3) |
|||
|
|
1 |
|
|||||||||
сж |
1 + |
h |
сж |
|
||||||||
|
|
n |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Сила обжима выражается аналогично:
|
|
|
|
|
|
|
1 |
|
1 |
|
||
|
|
1 |
|
|
|
E |
|
1+ |
|
|||
|
|
|
|
n |
|
|||||||
|
|
|
|
n |
|
|||||||
P |
= µ |
|
|
|
|
|
|
|
h |
(2.4) |
||
|
|
1 |
|
|
||||||||
обж |
|
1 + |
|
h |
сж |
|
||||||
|
|
n |
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
Подставляя значения всех сил, противодействующих Ркррез, получим значение последней
|
|
|
|
|
|
|
1 |
|
1 |
|
|
|
|
|
1 |
|
|
Е |
|
1+ |
|
||
|
|
|
|
n |
|||||||
|
|
|
|
|
|
||||||
Pкр |
|
= ∆l δ σР + |
|
|
|
|
|
hсжn [tg(β) + f sin2 (β) + µ( f + cos2 (β)], (2.5) |
|||
рез |
|
|
1 |
||||||||
|
|
1 + |
h |
|
|
|
|||||
|
|
|
т |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
где |
|
∆l – длина рабочего органа, соприкасающегося с порослевиной; |
|||||||||
δ- ширина рабочего органа;
Е– модуль деформации;
µ- коэффициент Пуассона;
ϕ - угол трения;
β - угол наклона фаски, рад;
f – коэффициент трения массы о материал лезвия, f=tg ϕ.
15
2.1. Пример расчета влияния геометрических параметров режущего элемента на силу резания ствола
Определить влияние угла наклона фаски β, геометрических параметров режущего элемента ∆l, δ на силу резания ствола
Расчёт выполнить для h=0,4; 1,2; 2; 2,4; 3.2 см
Константы Е=5000 Па; µ=0,14; ϕ=45°; m=1; n=1; σр=24 106 Па. Переменные ве-
личины β=30…85°; ∆l=2…5 см;
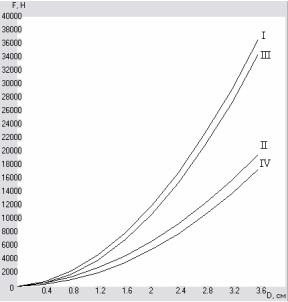
Рис. 2.2 Зависимость силы резания от диаметра поросли
δ=0,4…1 см На рис. 2.1 показана зависимость
силы резания от диаметра поросли для четырех случаев (I - δ=0,01 м, β=85°; II - δ=0,005 м, β=85°; III - δ=0,01 м,
β=45°. IV - δ=0,005 м, β=45°).
На основании полученной зависимости установлено, что толщина лезвия оказывает большее влияние на снижение силы резания, чем его заточка.
1.3.Контрольные вопросы
1.Какие силы действуют на лезвие при его внедрении в ствол?
2.Что оказывает большее влияние на силу резания – угол заточки лезвия или его толщина?
3.От каких физико-механических параметров древесины зависит сила ре-
зания?
4.При одинаковой длине режущего элемента, но разных диаметрах перерезаемого ствола Pкр будет различной?
16
3. ИССЛЕДОВАНИЕ ДИНАМИЧЕСКИХ ПРОЦЕССОВ В ГИДРОПРИВОДЕ КУСТОРЕЗА С ГИБКИМИ ИНЕРЦИОННО-РУБЯЩИМИ РАБОЧИМИ ОРГАНАМИ
3.1. Основные положения и методические указания
Для описания работы гибкого инерционно-рубящего рабочего органа применим известное из теоретической механики дифференциальное уравнение
вращения твёрдого тела вокруг неподвижной оси [1, 2] |
|
||||
J пр |
|
dω |
= M дв − M c , |
(3.1) |
|
dt |
|||||
|
|
|
|
||
где ω - угловая скорость вала гидромотора, с-1;
Мдв - момент, развиваемый гидромотором, Н м;
Jпр - приведенный момент инерции вращающихся масс к валу гидромотора рассчитываем по формуле Jпр = kp Jд + Jэл, кг м2;
кр - коэффициент, учитывающий вращающиеся массы редуктора;
Jд - момент инерции роторной группы гидромотора, кг м2;
Jэл - момент инерции гибкого рабочего органа, кг м2;
Момент инерции в вертикальной плоскости, представляя режущий элемент как параллелепипед, находим по формуле
J |
|
= |
|
1 |
m |
|
[l2 |
+δ 2 ], |
(3.2) |
|
Z |
12 |
эл |
||||||||
|
|
|
|
|
|
|||||
где l – длина элемента, м;
δ - толщина элемента, м;
mэл – масса элемента гибкого рабочего органа mэл=ρ V, кг;
ρ - плотность материала, из которого изготовлен режущий элемент, кг/м3; V – объём режущего элемента, м3.
Используя теорему Штейнера, из формулы (3.2) находим момент инерции режущего элемента относительно оси вращения вала
17 |
|
||
J эл = J Z + mэл R2 , |
(3.3) |
||
где R – расстояние от оси вращения элемента до оси вращения вала, м. |
|||
Момент, развиваемый гидромотором, вычисляется по формуле |
|
||
Мдв = |
ηn qм∆p |
, |
(3.4) |
2πηo
где ηn - полный КПД гидромотора;
ηo - объёмный КПД гидромотора;
qм - удельный объём гидромотора, м3/об;
∆p - перепад давлений масла между полостями нагнетания и слива гидро-
мотора, то есть |
|
∆p = p1 − p0 , |
(3.5) |
где р1 - давление масла в полости нагнетания гидромотора, МПа;
ро - давление масла в полости слива гидромотора, МПа.
Значения давлений масла можно определить из уравнения постоянства
расхода масла, подаваемого в гидромотор от насоса |
р1 и ро , выходящего из |
гидромотора на слив. |
|
Момент нагрузки на валу гидромотора, создаваемый силами сопротивле- |
|
ния резанию, для инерционно-рубящего органа равен: |
|
M c =εуд Jэл , |
(3.6) |
где εуд – угловое ускорение удара, с-2. |
|
Из теории импульсного резания известно, что усилие импульсного резания можно выразить из усилия «силового» резания Fл, введя поправочный совокупный коэффициент динамичности по усилию резания КДР
FДИН = FЛ КДР . |
(3.7) |
А из теоретической механики известно, что импульс силы выражается формулой
18
− FДИН |
= |
mЭЛ R (ωдо. уд −ωп. уд ) |
, |
(3.8) |
|
||||
|
|
t уд |
|
|
где ωдо.уд. – угловая скорость рабочего органа до удара, с-1;
ωп.уд. – угловая скорость рабочего органа после удара, с-1; tуд – момент времени, в течение которого произошёл удар, с.
Тогда ускорение, получаемое режущим элементом в результате взаимодействия с порослью, вычисляем по формуле
ε уд = |
ωп. уд −ωдо. уд |
|
= |
FДИН |
. |
|
(3.9) |
||
t уд |
|
|
|
||||||
|
|
|
m R |
|
|
||||
Подставим это ускорение в формулу (3.6), получим искомый момент, соз- |
|||||||||
даваемый на валу от сил резания |
|
|
|
|
|
|
|
||
|
Мс = |
|
FДИН |
J |
эл . |
(3.10) |
|||
|
|
|
|||||||
|
|
|
|
m R |
|
|
|||
Подставив найденные выражения Мдв и Мс в исходное уравнение (3.1), получим дифференциальное уравнение движения гибкого рабочего органа с приводом от гидромотора
J |
|
dω |
= |
η |
q |
|
p |
− |
FДИН |
J |
|
|
|
|
|
|
|
n |
|
м |
|
|
|
. |
(3.11) |
||||
пр dt |
|
|
m R |
эл |
||||||||||
|
|
2πη |
o |
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Для возможности более полного исследования динамических процессов в рассматриваемом гидроприводе уравнение (3.11) должно быть дополнено вторым дифференциальным уравнением, которое будет описывать расход рабочей жидкости. Это уравнение имеет вид
dp |
= |
1 |
(qнωн − qмω− ay p), |
(3.12) |
dt |
|
|||
|
K(p ) |
|
||
где К(р) - коэффициент податливости упругих элементов гидропривода; qн - рабочий объём насоса, м3/об;
qм - рабочий объём гидромотора, м3/об;
ωн – угловая скорость вращения насоса, с-1;
ω - угловая скорость вращения вала гидромотора, с-1;
19
аy - коэффициент утечек.
При моделировании динамических процессов в рассматриваемом гидроприводе уравнения (3.11) и (3.12) рассматриваются совместно как система, то есть
dp |
= |
1 |
|
|||
|
|
|
|
|
|
|
|
K(p ) |
|||||
dt |
|
|||||
|
|
1 |
|
|||
dω |
= |
|
||||
|
|
|
Jпр |
|
||
|
|
|||||
dt |
|
|
||||
(qнωн −qмω −ay p);
|
η |
q |
|
p |
|
1 |
|
FДИН J |
|
(3.13) |
|
|
|
− |
|
эл |
. |
||||||
n |
|
м |
|
|
|
|
|
||||
|
|
J |
|
m R |
|
||||||
|
2πηo |
|
пр |
|
|
|
|||||
Система (3.13) представляет собой систему дифференциальных уравнений первого порядка, которая математически описывает динамические процессы в рассматриваемом гидроприводе.
Решим эту систему уравнений.
Для простоты записи решения произведем замену:
b = |
1 |
|
η |
q |
|
; c = |
1 |
|
|
|
|
FДИН |
J эл |
|
d = |
q |
ω |
e = |
q |
м |
|
f = |
ay |
|
|
|||||||||
|
|
n |
|
м |
|
|
|
|
|
|
|
|
|
|
; |
|
н н |
; |
|
; |
|
|
. |
|||||||||||
|
J пр |
|
2πηo |
|
|
J пр |
|
|
m |
R |
|
|
|
|
|
K( p) |
|
K( p) |
|
K( p) |
|
|
||||||||||||
Тогда получим систему уравнений в следующем виде: |
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dp |
= d − e ω − f p, |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
(3.14) |
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dω |
= b p − c. |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
Решаем первое уравнение системы: |
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
d 2 p |
|
|
= −e |
dω |
− f |
|
dp |
; |
|
|
|
|
|
|
|
|
|
|
(3.15) |
||||||||||
|
|
|
|
|
dt2 |
dt |
dt |
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
Подставим в уравнение (3.15) второе уравнение системы (3.14): |
|
|
||||||||||||||||||||||||||||||||
|
|
|
|
|
d 2 p |
|
= e (b p − c) − f |
dp |
; |
|
|
|
|
|
|
|
(3.16) |
|||||||||||||||||
|
|
|
|
|
dt2 |
dt |
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
d 2 p |
|
+ f |
dp |
+ b e p = e c . |
|
|
|
|
|
|
(3.17) |
||||||||||||||||||
|
|
|
|
|
dt2 |
|
dt |
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
Заменим: e c = z; be = g , тогда
|
|
|
20 |
|
|
d 2 p |
+ f |
dp |
+ g p = z. |
(3.18) |
|
dt 2 |
dt |
||||
|
|
|
Для решения данного дифференциального уравнения отбросим правую часть и возьмем порядок дифференциального уравнения как степень некоторого числа y, получим
y2 + fy + g = 0; D = f 2 − 4g;
y |
= − f ± D . |
(3.19) |
1,2 |
2 |
|
|
|
Опытным путем установлено, что значение дискриминанта D меньше нуля. Из высшей математики, с учетом этого, известно, что уравнения (3.18) дают предварительный ответ:
|
|
с |
|
D t) +C2 |
|
|
|
D t)). |
|
|
|
|
|
pо |
= е− |
2t (C1 cos( |
|
sin( |
|
(3.20) |
|||||||
|
|
|
|
2 |
|
|
|
2 |
|
|
|
|
|
Найдем константы C1 и C2 , если известны граничные условия ωo |
|
t=0 |
= 0 : |
||||||||||
|
|||||||||||||
|
|
C1 +C2 = 0 C1 = −C2 . |
|
|
|
|
|
||||||
Пусть C2 =1, значит C1 = −1. Подставив полученные значения C1 |
и C2 в |
||||||||||||
(3.20), получим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
= е− |
с |
D t) −cos( |
|
D t)). |
|
|
|
|
|
|||
pо |
2t (sin( |
|
|
(3.21) |
|||||||||
|
|
|
2 |
|
|
2 |
|
|
|
|
|
|
|
Вернемся к правой части уравнения (3.18), пусть |
|
|
|
|
|||||||||
|
|
|
|
|
|
|
& |
|
&& |
|
|
|
|
Ω = А - в соответствии с уравнением, тогда Ω = |
0; Ω = 0. |
|
|
|
|
||||||||
Подставим значения Ω в (3.18): |
|
|
|
|
|
|
|
|
|||||
|
|
gA = z |
A = |
z |
|
; |
|
|
|
|
|
|
|
|
|
g |
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||
Ω = A Ω = |
z |
. |
(3.22) |
|
|||
|
g |
|
|