

442
.pdf
|
|
|
|
51 |
|
|
|
|
ρ |
|
|
= |
|
r |
|
|
|
sinγ |
|
sinψ , |
|
(8.5) |
||||
|
|
|
||||||
γ = |
π |
−ψ − µ |
. |
(8.6) |
||||
|
2 |
|
|
|
|
|||
x
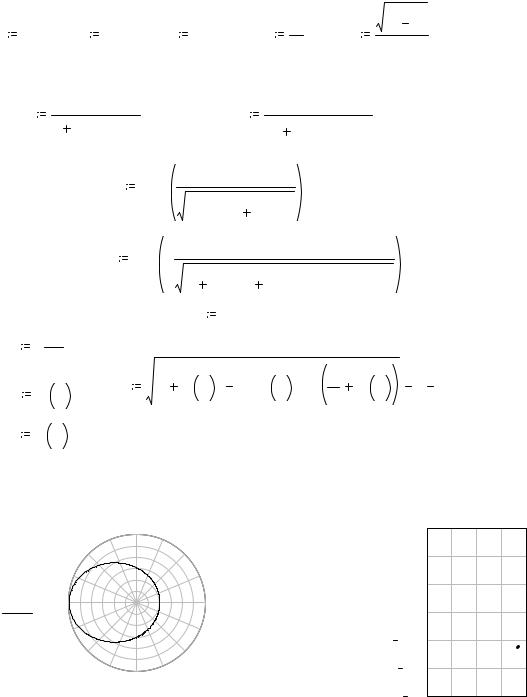
Рис. 8.1 Схема кулачкового механизма
Учитывая (8.4) и (8.5), получим:
|
ρ |
|
ψ = arctg |
|
+tgµ |
|
||
r cos µ |
. |
|
Теперь вычисляем перемещение ролика толкателя:
z = OO1 −r − ρ( 0 ) .
Расстояние OO1 найдем по теореме косинусов:
OO1 =  r2 + ρ2 −2 r ρ cos π2 + µ .
r2 + ρ2 −2 r ρ cos π2 + µ .
Тогда (8.8) перепишем в виде:
z = |
r |
2 |
+ ρ |
2 |
−2 |
π |
|
−r − ρ( 0 ) |
|
|
|
r ρ cos |
2 |
+ µ |
|||||
|
|
|
|
|
|
|
|
. |
|
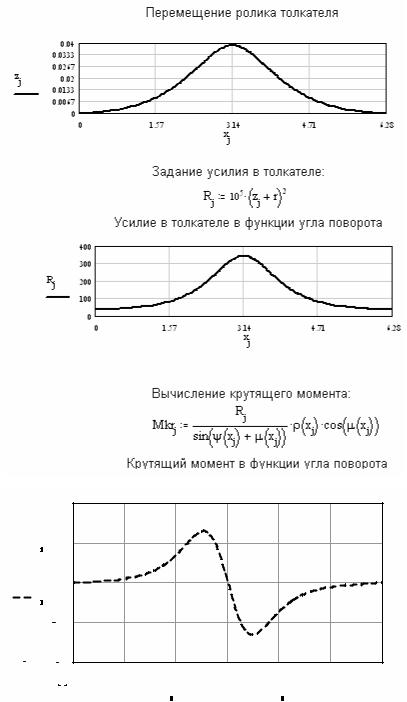
Крутящий момент, приложенный к кулачку:
M кр = sin(ψR+ µ ) ρ cos µ .
(8.7)
(8.8)
(8.9)
(8.10)
|
|
|
|
|
|
|
|
|
52 |
|
|
|
|
|
|
|
|
|
8.2. Определение перемещения ролика толкателя |
|
|
|
|
|
|||||||||||||
Решение с использованием пакета Mathcad показано на рис. 8.2-8.3 |
||||||||||||||||||
|
|
|
Определение перемещения толкателя и крутящего момента, |
|||||||||||||||
|
|
|
|
|
|
приложенного к кулачку |
|
|
|
|
|
|
||||||
|
|
|
|
|
Геометрические параметры: |
|
|
|
|
|
||||||||
r |
0.02 |
a |
0.04 |
b |
0.035 |
|
p |
b2 |
|
ex |
a2 |
b2 |
|
|
|
|
||
|
a |
|
|
a |
|
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Функции угла поворота: |
|
|
|
|
|
|
|||||||
ρ(φ) |
|
p |
|
|
Prρ(φ) |
|
p |
|
|
.ex.sin(φ) |
|
|
|
|
||||
ex.cos(φ) |
|
|
ex.cos(φ))2 |
|
|
|
|
|||||||||||
|
1 |
|
|
|
|
(1 |
|
|
|
|
|
|
||||||
|
|
|
µ(φ) |
acos |
|
Prρ(φ) |
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
Prρ(φ)2 |
|
ρ(φ)2 |
|
|
|
|
|
|
|
|
||
|
|
ψ(φ) |
asin r. |
|
|
cos(µ(φ)) |
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
r2 |
ρ(φ)2 |
2.r.ρ(φ).sin(µ(φ)) |
|
|
|
|
|
|||||
Построение графиков: |
j |
0..359 |
|
|
|
|
|
|
|
|
|
|||||||
x |
j. π |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
180 |
|
|
|
|
|
|
|
|
|
π |
|
|
|
|
|
|
|
θj |
ψ xj |
|
z |
r2 |
ρ x |
2 |
2.r.ρ x |
.cos |
µ x |
r |
ρ(0) |
|
|
|||||
|
|
j |
|
j |
|
|
j |
|
2 |
|
j |
|
|
|
|
|
||
yj |
ρ xj |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контур кулачка в полярных |
|
|
|
|
Угол отклонения |
||||||||||||
|
|
|
|
|
точки контакта от |
|||||||||||||
|
|
|
координатах |
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
вертикали |
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
112.5 |
90 |
67.5 |
|
|
|
|
|
|
|
|
0.2 |
|
|
|
|
|
|
|
0.06 |
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
135 |
|
|
45 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.05 |
|
|
|
|
|
|
|
|
0.13 |
|
|
|
|
||
|
|
|
|
0.04 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
157.5 |
|
0.03 |
|
22.5 |
|
|
|
|
|
|
|
|
|
|
|
||
yj |
|
|
|
0.02 |
|
|
|
|
|
|
|
|
|
0.067 |
|
|
|
|
|
|
|
0.01 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
180 |
|
|
0 |
|
|
0 |
|
|
|
|
θj |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
202.5 |
|
|
|
337.5 |
|
|
|
|
|
|
0.067 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
225 |
|
|
|
315 |
|
|
|
|
|
|
|
0.13 |
|
|
|
|
|
|
|
247.5 |
|
292.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
270 |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xj |
|
|
|
|
|
|
|
|
|
0.2 |
1.57 |
3.14 |
4.71 |
6.28 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
xj |
|
|
|
|
|
|
Рис. 8.2 |
Построение профиля кулачка |
|
|
|
||||||||||
53
|
8.5 |
8.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
4.25 |
|
|
|
|
|
|
|
Mkrj |
0 |
|
|
|
|
|
|
|
|
4.25 |
|
|
|
|
|
|
|
8.5 |
8.5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1.05 |
2.09 |
3.14 |
4.19 |
5.24 |
6.28 |
|
|
0 |
|
|
x |
|
|
2.π |
|
|
|
|
|
j |
|
|
|
Рис. 8.3. |
Определение перемещения толкателя и усилия, а также |
|||||||
|
крутящего момента в функции угла поворота |
|||||||
8.3. Контрольные вопросы
1.В чем отличие полярных координат от Декартовых?
2.Геометрические параметры кулачкового механизма.
3.Построение действительного профиля кулачка.
4.Как определить перемещение, усилие и крутящий момент кулачкового механизма?

54
9. РАСЧЁТ НЕОБХОДИМОЙ СИЛЫ ДЛЯ ТОРМОЖЕНИЯ ЛЕСОВОЗА НА СПУСКЕ
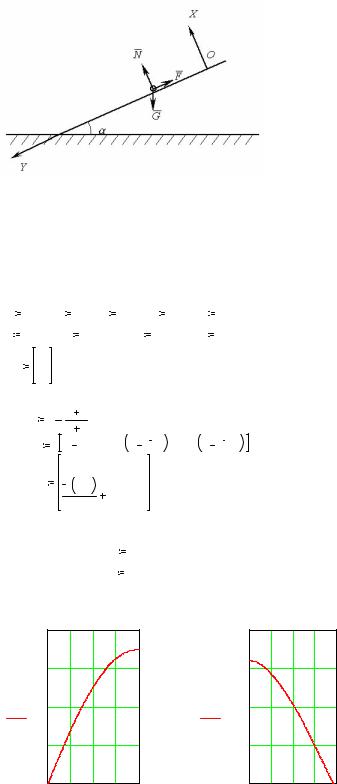
9.1. Основные положения и методические указания Внешняя тормозящая сила, действующая на лесовоз при торможении на
спуске, приближенно может быть задана выражением [4]:
C |
A |
|
A +V |
(1 − eλt ) |
, t ≤ T ; |
(9.1) |
|||
B |
B +V |
||||||||
|
|
|
|
|
|||||
F= |
|
|
|
|
|
|
|
||
C |
|
B |
|
|
A +V |
(1 − eλT ) |
, t ≥ T , |
|
|
|
A |
|
B +V |
|
|||||
|
|
|
|
|
|
||||
где V — скорость поезда; A, B, C, λ — постоянные;
T — время, за которое давление воздуха в тормозных цилиндрах достигает максимального значения.
Кроме того:
m — масса поезда;
α — крутизна спуска в радианах; g — 9,81 м/с2.
Вычислим тормозной путь, если известны значения перечисленных постоянных и начальная скорость V0. Построим зависимость пути и скорости лесовоза в функции времени.
Запишем дифференциальное уравнение движения лесовоза, рассматривая его как материальную точку, в соответствии со схемой (рис. 9.1).
&& |
= −F + mg sinα . |
|
|
|
(9.2) |
my |
|
|
|
||
Учитывая, что угол α весьма мал и при этом sinα ≈α , получим |
|
||||
|
|
&& |
|
|
(9.3) |
|
my = −F + mg α . |
||||
Уравнение (9.3) перепишем в виде системы двух дифференциальных |
|||||
уравнений первого порядка: |
|
|
|
|
|
|
& |
=V ; |
|
||
|
y |
|
|||
|
& |
|
F |
|
|
|
V |
= − |
m |
+ g a. |
(9.4) |
55
Рисунок 9.1 – Схема к расчету силы необходимой для торможения лесовоза
9.2. Расчет силы, необходимой для торможения лесовоза
Решение с использованием пакета
Mathcad показано на рис. 9.1 – 9.2.
Исходные данные: m=5000 т; A=360
с/м; B=72 с/Н; C=6000 кН; λ=0,1 с-1; T=20с; α=0,001; V0=20 м/с; g=9,81 м/с2.
|
Торможение поезда |
|
|
|
|
|
|
|
|
|
|
|
|||||
Исходные данные: |
|
|
|
|
|
|
|
|
|
|
|
||||||
m |
5.106 |
a |
360 λ |
0.1 |
v |
20 |
b |
72 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
0 |
6 |
|
|
|
|
|
|
|
T |
20 |
|
α |
0.001 |
|
c |
. |
g |
9.81 |
|
|
|
|
||||
|
|
6 10 |
|
|
|
|
|||||||||||
|
y |
0 |
|
-вектор начальных условий. |
|
|
|
|
|
|
|||||||
|
v0 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Задание силы сопротивления: |
|
|
|
|
|
|
|
|
||||||||
|
p(v) |
c.b .a |
v |
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
a b |
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
f(v,t) |
|
if T t>0 ,p(v). 1 e λ.t ,p(v). 1 e λ.T |
|
|
|
|
||||||||||
|
|
|
|
|
|
y1 |
|
|
|
|
|
|
|
|
|
|
|
|
D(t,y) |
|
f y1 |
,t |
|
|
|
-вектор первых производных. |
|
||||||||
|
|
|
|
|
m |
g.sin(α) |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Численное интегрирование с помощью функции rkfixed: |
|
|
||||||||||||||
|
|
|
|
|
|
Z |
|
rkfixed(y,0 ,29 ,300 ,D) |
|
|
|
|
|
||||
|
|
|
|
|
|
n |
0 .. 299 |
|
|
|
|
|
|
|
|
||
|
|
Зависимость пути от |
|
|
|
|
Зависимость скорости |
||||||||||
|
|
|
|
|
времени |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
от времени |
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
400 |
|
|
|
|
|
|
|
|
|
|
25 |
|
|
|
|
|
|
300 |
|
|
|
|
|
|
|
|
|
18.75 |
|
|
|
|
|
Zn,1 |
200 |
|
|
|
|
|
|
|
|
Zn,2 |
12.5 |
|
|
|
|
||
|
|
100 |
|
|
|
|
|
|
|
|
|
|
6.25 |
|
|
|
|
|
|
0 |
0 |
7.22 |
14.45 21.67 |
28.9 |
|
|
|
0 |
7.5 |
15 |
22.5 |
30 |
|||
|
|
|
|
|
|
0 |
|||||||||||
|
|
|
|
|
|
Zn,0 |
|
|
|
|
|
|
|
|
Zn,0 |
|
|
|
Рис. 9.2 Расчет с помощью Mathcad |
|
|||||||||||||||
|
|
|
|
торможения лесовоза |
|
|
|
|
|||||||||
9.3. Контрольные вопросы
1.Перечислите силы, действующие на лесовоз при его движении.
2.Какие величины входят в уравнение движения лесовоза?
3.Как изменятся путь и скорость торможения в зависимости от времени?
56
10. СИЛОВОЙ АНАЛИЗ КРИВОШИПНО-ШАТУННОГО МЕХАНИЗМА
10.1. Основные положения и методические указания
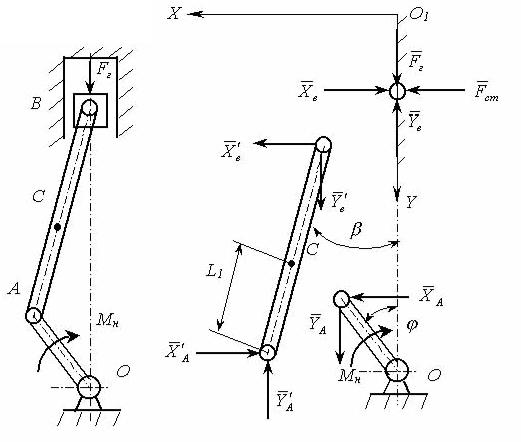
Кинематическая схема однорядной поршневой машины изображена на рис. 10.1. Система состоит из кривошипа OA, шатуна AB и поршня B. Для определения усилий, действующих в сочленениях шатунно-кривошипного механизма, рассмотрим схему (рис. 10.1) [4]. Данная механическая система имеет одну степень свободы. В качестве обобщенной координаты выбирается угол ϕ .
Дифференциальное уравнение движения поршня:
&& |
= Fг −Yв , |
(10.1) |
mп y |
где mп — масса поршня;
Fг — сила давления рабочего тела, действующего на поршень;
Yв — вертикальная составляющаясилывзаимодействияпоршнясшатуном;
&y& — ускорение поршня в направляющих.
Для определения силы давления поршня на стенку цилиндра можно использовать равенство:
xв = Fст ,
где xв — горизонтальная составляющая силы взаимодействия поршня с шатуном.
Выразим перемещение поршня через обобщенную координату — угол поворота кривошипа ϕ :
y = OA + AB −OA cosϕ − AB cos β , |
(10.2) |
где OA=R; AB=L; |
|
β — угол между осями шатуна и цилиндра. |
|
Запишем уравнение связи: |
|
R sinϕ = L sin β . |
(10.3) |
57
а) |
б) |
Рис. 10.1 а– кинематическаясхемамеханизма, б– схемадлясиловогоанализа Дифференцируя (10.3) по времени дважды, и, учитывая (10.2), запишем
(10.1) в виде:
|
|
|
&& |
|
|
|
|
|
|
&2 |
= Fг −Yв , |
(10.4) |
|||
mп P1 (ϕ ) ϕ + mп P2 |
(ϕ ) ϕ |
|
|||||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
P1(ϕ ) = R sinϕ ( 1 + P3 (ϕ )) ; |
|
|
|
|
|||||||||||
P (ϕ ) = L λ P (ϕ ) sinϕ +cosϕ +λ |
cos2 ϕ |
|
|
||||||||||||
|
|
||||||||||||||
2 |
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos β ; |
|
|
P (ϕ ) = λ cosϕ |
|
|
|
|
|
|
|
|
|
|
|
|
|||
3 |
|
|
cos β ; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
sinϕ |
|
|
2 |
|
cos2 ϕ |
|
|
|
||||
P (ϕ ) = λ |
|
|
λ |
|
|
|
|
|
−1 |
|
|||||
|
|
|
2 |
|
|
||||||||||
4 |
|
|
|
|
|
|
cos |
β |
|
|
|
||||
|
|
|
cos β |
|
|
|
|
|
; |
|
|||||
λ = |
R |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
L . |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Запишем систему уравнений движения шатуна:

58
mш ddtυcx = X B − X A ;
mш |
|
dυcy |
=YB −YA ; |
|
|
|
|
|
|
(10.5) |
|||
dt |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
J |
шс |
β&&= −X |
A |
L cos β +Y |
A |
L sin β − X |
B |
( L − L |
)cos β +Y |
B |
( L − L )sin β, |
||
|
|
|
|
1 |
1 |
1 |
|
1 |
|||||
где υcx, υcy — составляющие скорости центра масс шатуна по осям x и y; XA, YA — горизонтальная и вертикальная составляющие силы взаи-
модействия между шатуном и кривошипом; Mш — масса шатуна;
Jшс — момент инерции шатуна относительно его центра масс; L1 — расстояние между точками A и C.
Запишем выражение для определения координат центра тяжести шатуна:
xc =( L − L1 ) sin β; |
|
yc =( L − L1 ) cos β. |
(10.6) |
Дифференцируя (10.6) и используя (10.3), перепишем (10.5) в виде:
mш P5 |
(ϕ ) ϕ +mш P6 |
(ϕ ) ϕ |
= X B − X A ; |
|
|
|
|
||||
|
&& |
|
|
|
& |
2 |
|
|
|
|
|
|
&& |
|
|
|
& |
2 |
=YB −YA ; |
|
|
|
(10.7) |
mш P7 (ϕ ) ϕ +mш P8 |
(ϕ ) ϕ |
|
|
|
|
||||||
|
&& |
|
& |
2 |
=−XA L1 cosβ +YA L1 sinβ −XB ( L−L1 )cosβ +YB ( L−L1 )sinβ, |
||||||
Jшс P3(ϕ) ϕ+Jшс P4(ϕ) ϕ |
|
||||||||||
где |
|
|
|
|
|
|
|
|
|
|
|
|
P5 (ϕ ) = P3 (ϕ )( L − L1 ) cos β; |
|
|
|
|
||||||
|
P (ϕ ) =( L − L ) |
|
|
|
|
3 |
|
cos2 |
ϕ |
sinϕ ); |
|
|
( P (ϕ ) cos β −λ |
cos2 |
β |
||||||||
|
6 |
1 |
|
|
4 |
|
|
|
|
||
|
P7 (ϕ ) = λ( L − L1 ) P3 (ϕ ) sinϕ; |
|
|
|
|
||||||
|
P (ϕ ) = λ( L − |
L |
) ( P (ϕ ) sinϕ +λ |
cos2 |
ϕ |
). |
|||||
|
|
|
|||||||||
|
8 |
1 |
|
|
|
4 |
|
|
cos β |
|
|
|
|
|
|
|
|
|
|
|
|
||

59
Запишем уравнение вращательного движения кривошипа:
|
Jоϕ = X A R cosϕ +YA R sinϕ − M н , |
(10.8) |
|
&& |
|
где |
Jо — момент инерции коленчатого вала относительно оси вращения; |
|
|
M н — часть нагрузочного момента, приходящегося на один кривошип. |
|
Запишем систему обыкновенных дифференциальных уравнений второго порядка, состоящих из (10.6), (10.7), (10.8) в виде системы алгебраических уравнений, неизвестными в которой являются ϕ(t), XB, YB, XA, YA:
( i ) && |
( i ) |
|
|
( i ) |
; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
a11 ϕ +YB |
|
= C1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
( i ) && |
( i ) |
|
( i ) |
|
( i ) |
; |
|
|
|
|
|
|
|
|
|
||||
a21 ϕ − X B |
|
+ X A |
|
|
= C2 |
|
|
|
|
|
|
|
|
|
(10.9) |
||||
( i ) && |
( i ) |
|
( i ) |
|
( i ) |
; |
|
|
|
|
|
|
|
|
|
||||
a31 ϕ −YB |
|
+YA |
|
= C3 |
|
|
|
|
|
|
|
|
|
|
|
||||
( i ) && |
( i ) |
|
( i ) |
|
|
( i ) |
|
|
( i ) |
|
( i ) |
|
( i ) |
( i ) |
( i ) |
( i ) |
; |
||
a41 ϕ + a42 |
X B |
|
+ a43 |
YB |
|
+a44 |
X A |
+a45 |
YA |
= C4 |
|||||||||
( i ) && |
|
|
( i ) |
|
( i ) |
|
|
( i ) |
( i ) |
) = C5 , |
|
|
|
||||||
∑a51 |
ϕ +∑( a54 |
|
X A |
|
+ a55 |
YA |
|
|
|
|
|||||||||
i |
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
где индекс«i» показываетсоответствиепеременнойi-мумоментувремени;
Ck — правая часть (свободный член) k-го уравнения ( k = 1,5 ).
Принимая (ω = const ), определяем усилия в сочленениях механизма при различных его положениях из четырех линейных алгебраических уравнений. При их решении использовалось правило Крамера.
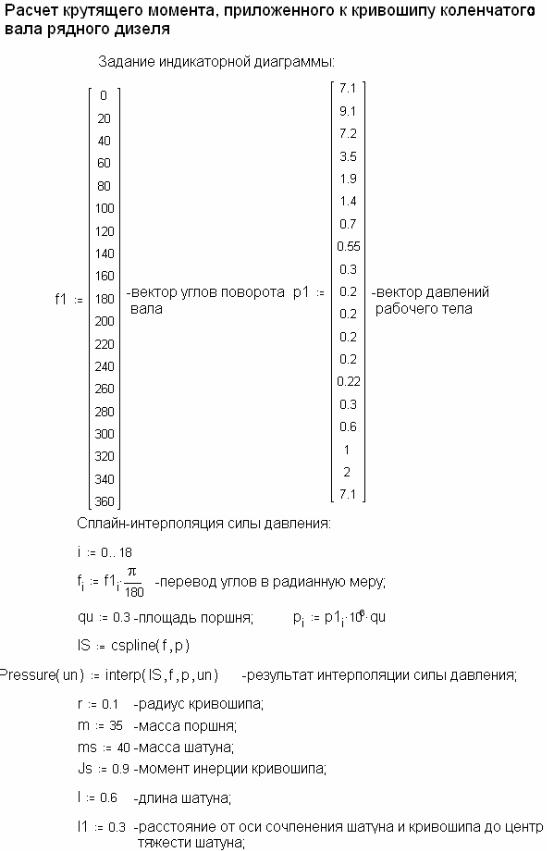
9.2. Расчет крутящего момента, приложенного к кривошипу ДВС
Решение с использованием пакета Mathcad показано на рис. 10.2 – 10.5
60
Рис. 10.2 Исходные данные для силового расчета ДВС