

442
.pdfxk
yk
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
61 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ |
|
|
|
|
|
|
|
r |
|
|
|
|
|
-коэффициент; |
|
|
|
|
w |
|
|
|
89 -угловая скорость. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
l |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Функции угла поворота: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||
β( α) |
|
|
|
|
|
asin( λ.sin( α ) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
z3( α) |
|
|
|
|
|
λ. |
|
|
|
cos( α) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
cos( β( α ) ) |
|
|
|
|
|
|
|
|
|
|
z4( α) |
|
|
λ. |
|
|
sin( α) |
|
|
. |
|
λ2.cos( α)2 |
|
1 |
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
z1( α) |
|
|
|
|
|
r.sin( α).( 1 |
|
|
|
z3( α) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos( β( α) ) |
|
cos( β( α ) ) |
|
|
|
|
|
|||||||||||||||||
z2( α) |
|
|
|
|
|
l.λ. z4( α).sin( α) |
|
|
|
|
cos( α) |
|
|
|
|
|
|
λ.cos( α)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
z5( α) |
|
|
|
|
|
z3( α).( l |
|
l1).cos( β( α) ) |
|
|
|
|
|
|
|
|
|
|
|
|
cos( β( α) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ3.cos( α)2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
z6( α) |
|
|
|
|
|
( l |
|
|
l1). z4( α).cos( β( α) ) |
|
|
|
|
|
|
|
|
.sin( α) |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ.( l1 |
|
|
|
l).z3( α).sin( α) |
|
|
|
|
|
|
|
|
|
|
|
|
cos( β( α) )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||
z7( α) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
λ.cos( α )2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
z8( α) |
|
|
|
|
|
λ.( l1 |
|
|
|
l). z4( α).sin( α) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
cos( |
β( α ) ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
z9( α) |
|
|
|
|
1 |
|
|
|
( λ.sin( α) )2 |
|
|
|
|
|
|
|
|
|
z10( α) |
|
|
|
|
|
|
|
l1 |
|
|
|
|
|
z11( α) |
|
|
|
l |
|
l1 |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z9( α ) |
|
|
|
|
|
z9( α) |
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
Вычисление усилий и крутящего момента в функции угла |
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
поворота: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
k |
|
|
|
|
|
|
|
0.. 255 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
γ |
|
|
|
|
|
|
|
|
k. |
π |
. |
360 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
180 256 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
Решение системы алгебраических уравнений по правилу |
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Крамера: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
z10 |
|
γ |
|
|
|
|
|
|
l1.λ.sin |
|
γ |
|
|
|
|
|
|
|
z11 |
γ |
|
|
|
|
|
( l |
|
|
|
|
l1).λ.sin γ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
k |
|
|
|
k |
k |
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Js.z4 |
γ |
|
k |
.w2 |
|
|
|
|
|
|
l1.λ.sin |
|
|
|
γ |
k |
|
|
|
|
|
z11 |
γ |
k |
|
( l |
|
|
l1).λ |
.sin γ |
k |
||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ms.z8 γ |
k |
.w2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ms.z6 γ |
k |
.w2 |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
m.z2 γ |
|
|
.w2 |
|
|
|
|
|
|
Pressure γ |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||
Рис. 10.3 Вычисление крутящего момента в функции угла поворота
|
|
|
|
|
|
|
|
|
|
|
|
|
62 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z10 γ |
k |
|
|
|
Js.z4 γ |
k |
.w2 |
|
|
z11 γ |
k |
( l |
l1).λ.sin |
γ |
k |
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
y1k |
|
0 |
|
|
|
ms.z8 γ |
k |
.w2 |
|
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
1 |
|
|
|
ms.z6 γ |
k |
.w2 |
|
|
|
1 |
|
|
|
0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
m.z2 γ |
k |
.w2 |
|
|
Pressure γ |
k |
|
0 |
|
|
|
1 |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
z10 γ |
k |
|
l1.λ.sin |
γ |
k |
|
|
|
|
|
Js.z4 γ |
.w2 |
|
( l |
l1).λ.sin |
γ |
k |
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
1 |
|
|
|
|
|
|
ms.z8 γ |
.w2 |
|
|
|
|
1 |
|
|
|
|
|||
y2k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
0 |
|
|
|
|
|
|
ms.z6 γ |
.w2 |
|
|
|
|
0 |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
m.z2 γ |
.w2 |
|
Pressure γ |
k |
|
|
1 |
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
|
z10 γ |
k |
|
l1.λ.sin γ |
k |
z11 γ |
k |
|
|
|
Js.z4 γ |
.w2 |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|||
|
|
0 |
|
|
|
1 |
|
|
|
|
|
0 |
|
|
|
ms.z8 γ |
.w2 |
|
|
|
|
|
|
|
||
y3k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
1 |
|
|
|
0 |
|
|
|
|
|
1 |
|
|
|
ms.z6 γ |
.w2 |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
0 |
|
m.z2 γ |
.w2 |
|
Pressure γ |
k |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
pk |
yk |
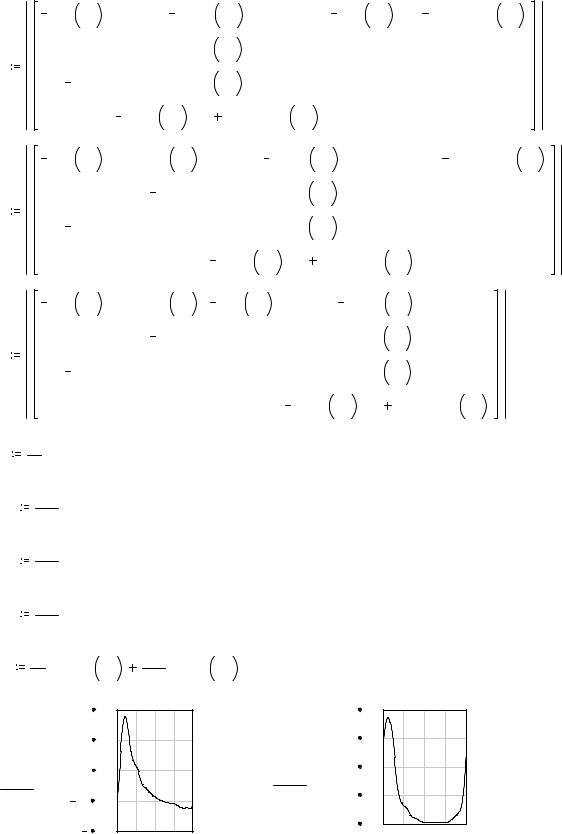
-горизонтальная составляющая силы взаимодействия |
|
|
|
|
|
|
||||||||||||||||||
|
xk |
кривошипа и шатуна; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
p1k |
y1k |
-вертикальная составляющая силы взаимодействия |
|
|
|
|
|
|
||||||||||||||||||
|
xk |
кривошипа и шатуна; |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
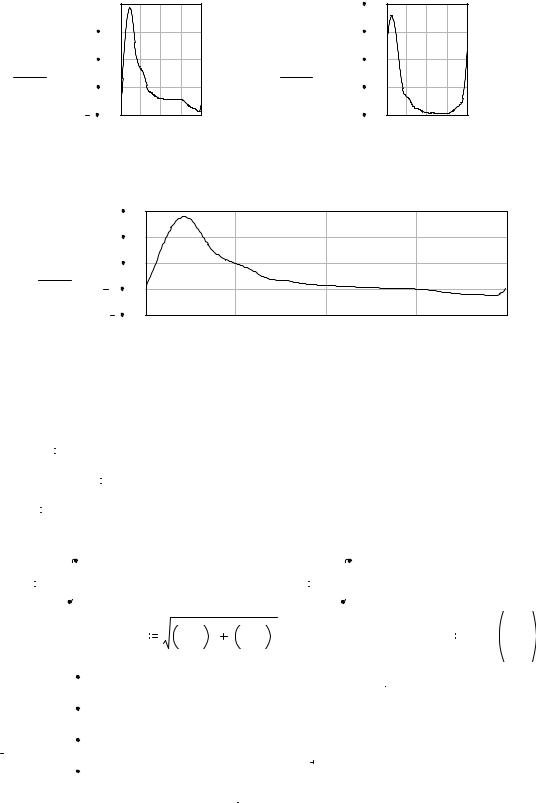
p2k |
y2k |
-горизонтальная реакция стенки цилиндра; |
|
|
|
|
|
|
|
|
|
|||||||||||||||
xk |
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
p3k |
y3k |
-сила взаимодействия поршня и шатуна; |
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
xk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
M |
yk .l1.cos γ |
k |
|
y1k .l1.sin |
γ |
k |
|
-крутящий момент. |
|
|
|
|
|
|
|
|
||||||||||
k |
xk |
|
|
|
xk |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
2.5 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2.9 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
1.6310 |
|
|
|
|
|
|
|
|
|
|
|
|
|
2.1810 |
|
|
|
|
|
|
|
|
|
|
pk |
|
|
4 |
|
|
|
|
|
|
|
|
|
|
p1 |
|
|
6 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.4710 |
|
|
|
|
|
|
|
|
|
|||
|
7.5 10 |
|
|
|
|
|
|
|
|
|
|
k |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
7.5110 |
|
|
|
|
|
|
|
|
|
|
|
|
1.2510 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
3.5 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
1 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
1.56 3.13 4.69 6.26 |
|
|
|
|
|||
|
|
|
|
|
0 |
1.573.144.716.28 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
γ k |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
γ k |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 10.4 |
Результат расчета крутящего момента ДВС |
|
|
|
|
|||||||||||||||||||
|
|
|
|
63 |
|
|
|
|
|
|
|
|
|
|
6 |
|
|
|
|
|
|
|
|
3 10 |
|
|
|
5 |
|
|
|
|
6 |
|
|
|
1.6310 |
|
|
|
|
2.26 10 |
|
|
p2k |
4 |
|
|
p3k |
|
6 |
|
|
9.5 10 |
|
|
|
1.5110 |
|
|
||
|
4 |
|
|
|
|
5 |
|
|
|
2.75 10 |
|
|
|
|
7.65 10 |
|
|
|
4 |
|
|
|
|
4 |
|
|
|
4 10 |
|
|
|
|
2 10 |
|
|
|
0 |
1.56 3.13 4.69 6.26 |
|
|
|
0 |
1.56 3.13 4.69 6.26 |
|
|
|
γ k |
|
|
|
|
γ k |
|
|
|
5 |
|
|
|
|
|
|
|
5 10 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
3.25 10 |
|
|
|
|
|
|
|
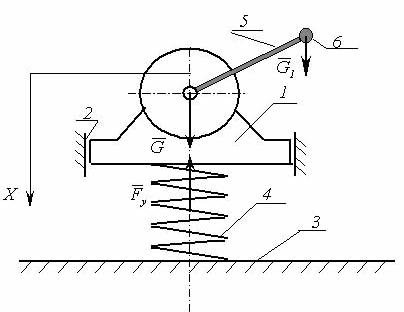
Mk |
|
5 |
|
|
|
|
|
|
1.510 |
|
|
|
|
|
|
||
|
|
4 |
|
|
|
|
|
|
|
2.5 10 |
|
|
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
2 10 |
|
|
|
|
|
|
|
|
|
0 |
1.57 |
γ k |
3.14 |
|
4.71 |
6.28 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Разложение крутящего момента в ряд Фурье |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
|
Интерполяция крутящего момента кубическими сплайнами: |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
IS1 |
|
|
|
cspline( γ ,M) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
|
|
Momkr( θ) |
|
|
interp( IS1 ,γ ,M ,θ) |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
|
|
ν |
|
|
1.. 8 -задание числа гармоник Фурье |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
Вычисление коэффициентов : |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
1 |
|
|
|
2.π |
|
|
Momkr( θ).sin( ν.θ) dθ |
|
|
|
|
|
1 |
|
2.π |
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||
|
Asν |
|
|
. |
|
|
|
|
Bcν |
|
|
|
|
. |
|
|
|
|
|
|
Momkr( θ).cos( ν.θ) dθ |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
π |
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
2 |
|
|
|
|
π |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
Asν |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
Амплитуды: Garm |
|
|
As |
|
|
|
Bc |
|
|
|
|
|
|
|
|
|
|
|
Фазы: Faz |
|
atan |
||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||
|
ν |
ν |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ν |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ν |
|
|
|
|
Bcν |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
2 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.1 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
1.510 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.45 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||
|
Garmν |
5 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Faz |
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
1 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ν |
|
|
0.2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
4 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
5 10 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0.85 |
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1.5 |
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
1 2 3 ν 4 5 6 7 |
8 |
|
|
|
|
|
|
|
|
|
|
|
1 2 3 4ν 5 6 7 8 |
||||||||||||||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||||
Рис. 10.5 Силовой анализ ДВС
64
10.3.Контрольные вопросы
1.Какие параметры входят в уравнение движения поршня?
2.Что такое обобщённая координата и почему в данном случае выбран угол поворота кривошипа?
3.Как аналитически определить центр тяжести звеньев?
4.Какие параметры входят в уравнение движения кривошипа?
5.Этапы силового расчета в Mathcad.
65
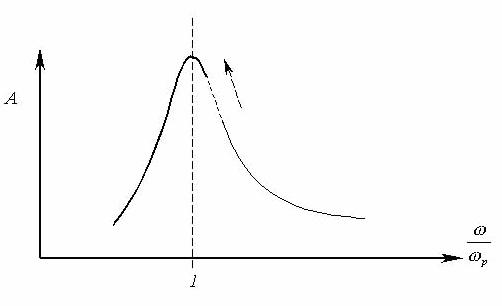
11. КОЛЕБАНИЯ ДВИГАТЕЛЯ, УСТАНОВЛЕННОГО НА УПРУГОМ ОСНОВАНИИ.
11.1. Основные положения и методические указания
Рассмотрим движение системы, изображенной на схеме (рис. 11.1). Двигатель 1, движущийся в направляющих 2, соединен с фундаментом 3 безынерционной пружиной 4. С валом двигателя под прямым углом к его оси прикреплен невесомый стержень 5, на конце которого располагается груз 6 [4].
Рис. 11.1 Кинематическая схема двигателя на упругом основании
Обычно считают, что эксцентриковый вибратор генерирует вынуждаю-
щую силу: |
|
P = P0 cosω t , |
(11.1) |
где |
|
P0 = mi ω2 l ;
mi — неуравновешенная масса; l — длина стержня;
ω — угловая скорость вала двигателя.
При этом предполагается, что значение ω наперед задано и не зависит от процесса колебаний упругой системы, на которой установлен вибратор.
66
В действительности это не так, и если используется двигатель, обладающий небольшой мощностью, то процесс колебаний упругой системы заметно влияет на величину ω и последняя также колеблется около некоторого среднего значения. Вследствие обратного влияния колебаний конструкции на угловую скорость вращения вала двигателя его работа в некотором диапазоне угловых скоростей становится неустойчивой. Этот эффект носит имя Зоммерфельда — известного физика, впервые наблюдавшего в 1904 г. неустойчивость на экспериментальной установке (рис.11.2).
Рис. 11.2 Зависимостьамплитудыколебаниядвигателяототношенияугловой скоростивалаккруговойчастотесвободныхколебанийконструкции
На графике изображена зависимость
|
ω |
|
, |
(11.2) |
|
A = A |
|
|
|
||
ω |
|
||||
|
|
|
|
|
|
|
|
p |
|
|
|
где A — амплитуда колебаний двигателя; ω — угловая скорость вала;
ωp — круговая частота свободных колебаний конструкции. Пунктирной линией показана зона неустойчивости. При увеличении при-
тока энергии в этой зоне угловая скорость не возрастает, а может снижаться, амплитуда колебаний при этом растет. Инженеру-механику следует знать об этом явлении, т.к. его можно встретить часто: мотор-компрессор, энергетическая установка находятся в корпусе, который располагается на упругом основа-
67
нии. Вместо того, чтобы увеличивать угловую скорость, мы, не обладая знаниями об эффекте Зоммерфельда, можем увеличивать уровень вредных колебаний локомотива.
Исследуем возможность проявления эффекта Зомерфельда. Жесткость пружины — C; массы двигателя и груза – m, m1, соответственно; J — момент инерции ротора; l — длина невесомого стержня; M — крутящий момент, приложенный к валу; µ — коэффициент вязкого сопротивления вертикальному движению корпуса; µ2 — коэффициент вязкого сопротивления вращению вала.
Запишем дифференциальные уравнения движения системы. Она имеет две степени свободы. За обобщенные координаты выбираем угол поворота вала двигателя — ϕ и вертикальное перемещение корпуса — x.
По теореме о движении центра масс:
|
|
|
|
|
|
dVc |
|
|
|
|
|
|
( m + m1 ) |
|
= −µx −cx +( m + m1 )g , |
(11.3) |
|||||||||
dt |
||||||||||||
|
|
|
|
|
|
|
|
& |
|
|
|
|
где Vc — скорость центра масс системы. |
|
|
|
|||||||||
Ускорение центра масс определим по формуле: |
|
|||||||||||
|
dVc |
|
&& |
|
|
m1 l |
& |
|
2 |
cosϕ ) . |
(11.4) |
|
|
|
|
|
|
|
|
||||||
|
dt |
= x − m + m1 |
(ω sinϕ +ω |
|
||||||||
Подставляя (4.19) в (4.18), получим первое дифференциальное уравнение |
||||||||||||
движения: |
l (ϕ sinϕ +ϕ |
cosϕ ) = −µx −cx +( m +m1 )g . |
(11.5) |
|||||||||
( m +m1 ) x −m1 |
||||||||||||
&& |
|
|
|
&& |
|
&2 |
|
|
& |
|
||
Запишем дифференциальное уравнение вращательного движения стержня: |
||||||||||||
J ϕ = M − µ2 |
ϕ + m1 |
l x sinϕ − m1 g l sinϕ . |
(11.6) |
|||||||||
&& |
|
|
|
& |
|
&& |
|
|
|
|||
Отправной пункт дальнейших рассуждений состоит в том, что колебания массы m1 влияют на угловую скорость ω и что момент M, передаваемый статором на ротор, зависит от угловой скорости. ЗависимостьM = M ( ω ) называется характеристикой двигателя и определяется его конструкцией и параметрами. Во многих случаях характеристику электродвигателя можно принять в виде линейной функции
M = M0 −bω , |
(11.7) |
где b=const.
Величина M0 зависит от рабочего напряжения. С помощью реостата можно изменить характеристику двигателя — на графике это отразится смещением ее параллельно самой себе (рис. 11.3).

68
Рис. 11.3 Зависимость момента от угловой скорости
С учетом (11.7), обозначая
µ1 = b + µ2 ,
преобразуем (11.7) к виду:
J ϕ = M 0 |
− µ1 |
ϕ |
+ m1 |
l x sinϕ − m1 g l sinϕ . |
(11.8) |
&& |
|
& |
|
&& |
|
Уравнения (11.5) и (11.8) представляют собой систему дифференциальных уравнений движения конструкции, изображенной на схеме (см. рис. 11.2). Интегрировать эти уравнения будем численно, методом Рунге-Кутты. С этой целью записывается система четырех дифференциальных уравнений первого порядка:
dV |
& |
& |
& |
2 |
) |
dt |
= f1( x,ϕ,x,ϕ |
,ϕ |
|
||
|
|
|
|
|
|
dω |
& |
& |
&2 |
) |
|
|
|||||
dt |
= f2 ( x,ϕ,x,ϕ |
,ϕ |
|
||
|
|
|
|
(11.9) |
|
dx |
|
|
|
|
|
=V |
|
|
|
|
|
td |
|
|
|
|
|
dϕ |
ω |
|
|
|
|
dt |
|
|
|
|
|
|
|
|
|
|
|
11.2. Расчет колебания двигателя
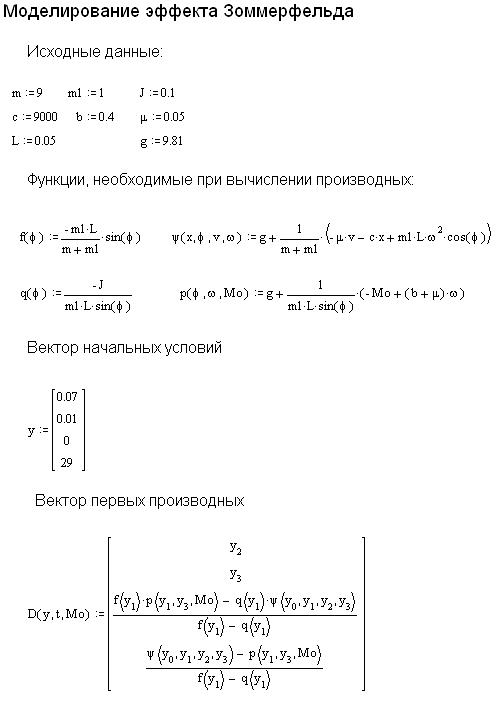
Примем, для примера, следующие данные:
M=9 кг; m1=1 кг; J=0,1 кН/м; l=0,05 м; µ=0,05; b=0,05; µ2=0,05.
69
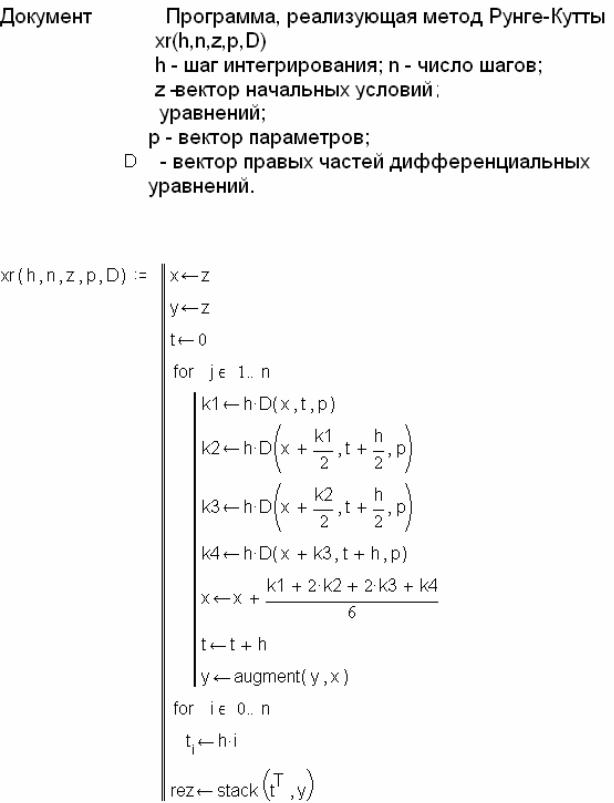
Компьютерное решение задачи средствами пакета Mathcad , использующее уже известную функцию rkfixed( ), показано на рис. 11.4-11.6.
Таким образом, эффект Зоммерфельда приводит к увеличению крутящего момента (дополнительный приток энергии) без увеличения угловой скорости. При этом растет амплитуда колебаний двигателя.
Рис. 11.4 Исходные данные для моделирования эффекта Зоммерфельда
70
Рис. 11.5 Алгоритм, реализующий метод Рунге-Кутта