

Вешкурцев- Бычков АСКиД РЭС
.pdf
|
|
|
Таблица 4.3 |
|
|
|
|
|
|
t,ч |
0 |
125 |
250 |
|
|
|
|
|
|
Q å(t) |
0,689 |
0,671 |
0,579 |
|
Для прогнозирования состояния РТУ воспользуемся полиномом Ньютона первой степени
F(t) = ξ (tn ) + Dξn(1−)1 × m, |
|
|
(4.6) |
|
|
|
|
||
где m – число шагов прогнозирования; |
Dξn(1−)1 |
– конечная разность 1-го |
|||||||
порядка: |
ξ (1) |
= Q (t |
|
) − Q (t ) = 0,579 − 0,871 = −0,092, |
|
||||
|
2 |
|
|||||||
|
n−1 |
Σ |
|
Σ 1 |
|
|
|
|
|
где t2= 250 ч, t1 =125 ч, а |
|
|
t = 125ч. |
|
|
|
|
||
В полиноме |
(4.6) |
неизвестно число |
шагов |
m . Для определения |
их |
||||
воспользуемся способом обратного прогнозирования [ 8 ] , |
при этом введем |
||||||||
Q*Σ (t) = 0 |
и |
тогда |
|
F*(t) = Q*Σ (t) |
, |
после чего получим |
|||
прогнозирующее уравнение : |
|
|
|
|
|
|
|
||
|
|
0 = 0,579 + (- 0,092 ) ×m* . |
|
|
(4.7) |
||||
В результате решения (4.7) |
получим m* = 0579 / 0,092 = 6,3. |
|
|||||||
Таким образом, отказ радиотехнического устройства произойдет через |
6,3 |
||||||||
шага прогнозирования, т.е. |
|
|
T = m × Dt = 6,3×125 = 787,5 ч. |
|
|
||||
4.2. Вероятностное прогнозирование
Задача прогнозирования в этом случае может быть сформулирована
следующим образом. |
|
в моменты времени ti |
|||
Пусть получены значения параметров ξs , s =1,2,...,k , |
|||||
(i = 0,1,..., n) |
и |
в каждом временном сечении состояние ОКД |
полностью |
||
характеризуется |
функцией распределения |
вероятности |
Fi (ξ ). По |
известным |
|
значениям |
ξs (ti |
), ξ (ti ), Fi (ξ ), ti [t0 , tn ] |
необходимо |
вычислить |
вероятность |
нахождения объекта в состоянии (n + j) по формуле
81
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Fn + j (ξr ) = P{ξr(tn + j ) < ξr } = òξr∞ ftn + j (ξr)dξr ,
где ξ – допустимое значение |
|
параметра; |
ft |
n |
(ξ ) – плотность вероятности |
|||
значений ξ (t) во временном |
|
|
|
|
|
+ j |
||
|
сечении |
t |
[tn + 1 , tn + m ] с математическим |
|||||
ожиданием m (t) и дисперсией σ |
2 |
(t). |
|
|
|
|
|
|
ξ |
ξ |
|
|
|
|
|
|
|
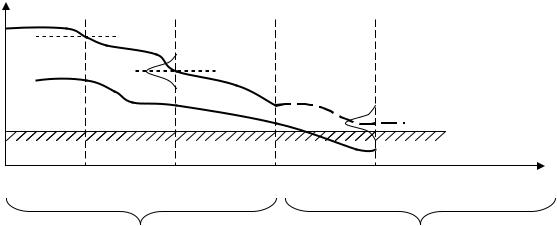
Зависимость параметров |
m (t) |
|
и |
σ 2 |
(t) |
от времени наблюдения за ОКД |
||
|
ξ |
|
|
ξ |
|
|
|
|
показана на рис. 4.2.
 m(t )
m(t )
σ (t1)
m(ti )
m(tn )
σ (ti ) |
m(tn+i ) |
0 |
|
|
|
t |
|
t1 |
ti |
tn |
tn+i |
||
|
|||||
|
|
T1 |
|
T2 |
|
|
Рис.4.2. Процесс вероятностного прогнозирования |
||||
Существуют следующие методы вероятностного прогнозирования.
1.Метод статистического градиента.
2.Метод, основанный на байесовском критерии.
3.Метод, основанный на известных функциях распределения.
4.Метод, основанный на предельных оценках (Чебышева, Кэмп-Мейделя, Колмогорова и др.).
Рассмотрим некоторые из указанных методов [8, 33].
4.2.1. Метод прогнозирования, основанный на известных функциях распределения вероятности
Если распределение параметров ОКД во временном сечении подчиняется, например, закону Вейбула
p(ξ > ξ*) = 1 – F (ξ*) = exp [ - ( ξ*/ α) β ],
82
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
где a , b - функции от f [x (ti)], то вероятность сохранения работоспособности
объектом в последующий период эксплуатации будет определяться выражением
[8]
p(x > x*) = exp {- [( x*/ Wα (t n + j)] Wβ ( t n +j ) },
где W(t n + j) = å Al Bl ( x,tn + j) , Al – коэффициент адаптации, характеризующий вес полинома Bl ( x,tn + j) степени l .
4.2.2. Методы прогнозирования, основанные на предельных оценках ( упрощенное вероятностное прогнозирование)
Для ориентировочного, предварительного прогнозирования могут быть использованы методы упрощенного вероятностного прогнозирования. Эти
методы определяются как методы прогнозирования искомой вероятности работоспособности технической системы при неизвестных функциях распределения вероятности.
Неравенство Чебышева. При неизвестном законе распределения параметра контроля x(t) для прогнозирования состояния системы пользуются вероятностными неравенствами, например, Чебышева:
P { | x - m1{ x (t)}| ³ e} £ s2ξ / e 2 ,
где Р{×} – вероятность потери работоспособности; m1{x (t)}– математическое ожидание случайной величины x (t) ; s2ξ - дисперсия случайной величины; e – величина поля допуска: (xmax - xmix ).
В общем виде неравенство Чебышева для цели прогнозирования можно сформулировать следующим образом.
Если имеется нестационарная случайная функция x(t) с математическим ожиданием m1ξ (t) и дисперсией Dξ(t) = s2ξ(t), то , как бы ни уменьшалось положительное число E(t) = x - m1{ x(t)} = a (x), вероятность того, что значения функции x (t) отклоняются от своего математического ожидания не меньше, чем на E (t), ограничена сверху Dξ (t) ¤ E (t)2 , т.е.
Pξ £ Dξ (t) ¤ E ξ (t)2 .
Устанавливая тенденцию изменений Dξ(t) и Eξ(t) и экстраполируя их, можно
оценить вероятность потери работоспособности технической системой в период эксплуатации. Для экстраполяции можно использовать математические модели
83
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

аналитического прогнозирования (полиномы, см. п. 4.1). В результате
подстановки формул экстраполяции неравенство Чебышева непосредственно для прогнозирования примет вид
Pξ (m) £ [ å Al ×Fσl ( m) ¤ å Al ×FEl ( m)]2,
l |
l |
где Fσl,, ,FEl – базовые выражения прогнозирующих формул для sξ (t) = 
 Dξ и
Dξ и
E ξ (t) соответственно; m – число шагов прогнозирования; l – степень полинома; Al – коэффициент адаптации (или вес) базовых выражений.
Неравенство Кэмп-Мейделя. Результаты прогнозирования с помощью неравенства Чебышева можно улучшить, если будут справедливы следующие положения [ 8 ].
1.Плотность вероятности может иметь один или несколько максимумов
(мод).
2.Единственная или максимальная мода должна быть приближенно равна математическому ожиданию.
3.Значения плотности вероятности непрерывно спадают по обеим сторонам моды, возможно, и неодинаково.
Соблюдение этих условий позволяет применить неравенство Кэмп-Мейделя, утверждающее, что для любого закона распределения, удовлетворяющего вышеприведенным условиям, более точное значение вероятности потери работоспособности ОКД определяется формулой [8]
Pt (x) £ { 2 Wσ(t) / 3[ x* - Wm (t)]}2 ,
где Wσ(t) и Wm(t) – прогнозирующие выражения для sξ (t) и m 1ξ(t).
Неравенство Колмогорова. Это неравенство является наиболее общим из вероятностных неравенств, учитывает максимальные изменения всех параметров
xs (t) , s = 1, 2, …, |
k |
и |
позволяет вычислить общую вероятность потери |
||||||
работоспособности ОКД [8] |
|
|
|
|
|
|
|||
ì |
|
k |
|
|
|
ü |
æ |
k |
ö |
|
|
|
|||||||
Píïmax |
|
å(ξs - m |
ξ s ) |
|
³ εýï £ |
çç |
å |
σξ s ÷÷ / ε2 . |
|
ï |
|
s =1 |
|
|
|
ï |
è s=1 |
ø |
|
î |
|
|
|
|
þ |
||||
|
|
|
|
||||||
Здесь e - запас работоспособности по всем параметрам.
4.3. Метод прогнозирования, основанный на статистической классификации (распознавание образов)
Преимущество методов статистической классификации или распознавания образов заключается в том, что прогнозирование можно осуществлять с момента проведения однократного контроля объекта диагностики. Кроме того, в процессе
84
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
классификации участвует вся совокупность параметров, определяющих состояние объекта. Постановка задачи прогнозирования в этом случае производится следующим образом.
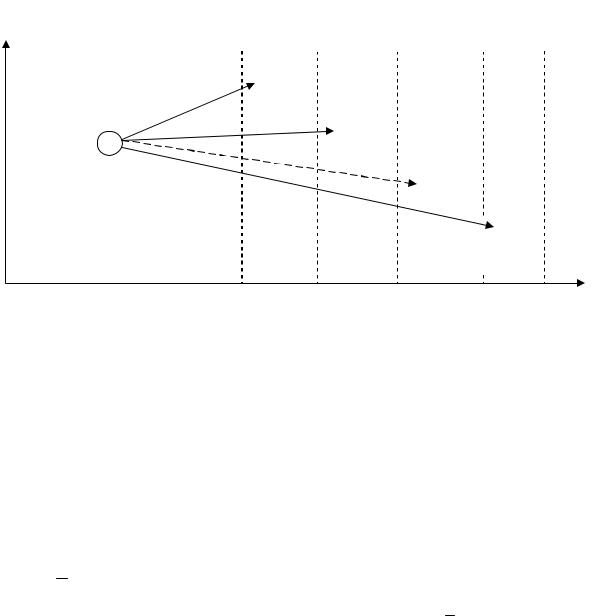
Пусть в момент t0 или в ограниченный начальный период времени получены значения параметров контролируемого процесса ξ1,ξ2 ,...,ξk , характеризующих
функцию ξ0 (t0). Необходимо по совокупности параметров {ξs } , s =1,2,...,k , координат вектора ξ0 принять решение о принадлежности процесса к тому или
иному классу R λ , |
λ =1,2,...,m , где R λ |
могут быть параметрическими: R1ξ = ξ 0 − ξ 1 , |
||||||
Rξ2 = ξ 1 − ξ 2 , … или временными интервалами |
R1T = 0 − T , R T2 |
= T − 2T , … и др. |
||||||
(рис.4.3). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Временные классы |
|
|
|
Объект |
|
Экстраполяцион- |
|
R1 |
R 2 |
|
R m |
ξ |
|
|
T |
T |
|
T |
||
прогнози- |
|
ные связи СS |
|
++++ |
|
|
|
|
|
|
|
|
|
||||
|
рования |
|
C1 |
++++++ |
|
|
|
|
|
|
|
|
++++ |
|
|
|
|
|
|
|
C2 |
|
|
++++ |
|
|
|
ξ |
+ |
|
++++++ |
¼ |
|
||
|
|
|
++++ |
|
||||
|
|
|
|
|
|
|||
|
|
|
Cm |
|
|
|
++++ |
|
|
|
|
|
|
|
|
++++ |
|
|
|
|
|
|
|
|
|
++++ |
|
|
|
|
|
|
|
|
++++++ |
|
|
|
|
|
|
|
|
++++ |
0 |
|
|
|
|
|
|
|
t |
|
t |
|
|
|
|
|||
|
T0 |
T1 |
|
T2 |
Tm |
|||
Рис.4.3. Статистическое прогнозирование состояния
Процесс установления экстраполяционных связей Сm осуществляется на
основе априорной информации и называется процессом обучения экстраполяционным связям. При прогнозировании по результатам текущего
контроля обнаружение и распознавание экстраполяционных связей производятся с помощью той или иной математической модели.
Существуют различные способы априорного описания классов, однако наиболее пригодным для практики является способ, связанный с вычислением статистических параметров, характеризующих центр рассеяния случайных величин.
Пусть ξλs характеризует статистический центр λ -го класса по s-му
параметру (координате). Тогда соотношение между ξs и ξλs будет определять близость объекта λ -му классу, т.е. осуществляется процесс распознавания или
85
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

прогнозирования состояния объекта. Перечислим некоторые меры близости (метрики).
1. Квадрат расстояния
ρλ = åk (ξs -ξλs )2 .
s=1
2. Скалярные произведения
k
ρλ = ξ1ξλ1 + ξ2ξλ 2 + ... + ξkξλk = åξsξλs .
s=1
3. Скалярное произведение при различных способах нормирования
|
|
k |
|
|
|
|
|
|
|
|
|
åξsξλs |
|||||||
ρλ = |
|
s=1 |
|
|
|
|
|
|
. |
|
|
|
|
|
|
|
|
||
k |
|
||||||||
|
|
k |
|||||||
|
|
åξs2 |
|
|
|
|
|
||
|
|
åξλ2s |
|||||||
|
|
s=1 |
s=1 |
||||||
4. Корреляционный метод
ρλ |
æ |
k |
|
ö |
- |
1 |
æ |
k |
öæ |
k |
|
ö |
|
|
|
|
|
||||||||
= ç |
åξsξλs ÷ |
k |
ç |
åξs ÷ç |
åξλs ÷. |
|||||||
|
è s=1 |
ø |
|
è s=1 |
øè s=1 |
ø |
||||||
5. Расстояние по Хеммингу
k
ρλ = åξ −ξλs .
s=1
Здесь λ = 1, 2,..., m .
Мера близости в линейном пространстве признаков с учетом видов параметров составляет
86
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

ρλ = êéåk |
as (ξs -ξλs )2 úù |
12 |
, |
λ = 1, 2, ..., m, |
ë s=1 |
û |
|
|
|
где as – весовой коэффициент s-го параметра признака, определяемый на стадии обучения, при этом соблюдается условие
k
åas = 1.
s=1
Мера близости в нелинейном пространстве признаков определяется выражением [8]
ρλ = åk |
asp [(ξs )p − (ξλs )p ], |
s=1 |
|
где p – степень нелинейности, обычно на практике p = 2, 3. |
|
Рассмотренные методы прогнозирования целесообразно использовать в тех |
|
случаях, когда векторы состояний ξ , принадлежащих различным классам объектов, несильно перемешаны [8 ].
При наличии помех и преобладании случайной составляющей в векторах состояния ξ образы–объекты различных классов Rλ оказываются существенно перемешанными, что затрудняет их распознавание. В этом случае целесообразно применять вероятностные методы. Мерой близости при этом является
апостериорная условная вероятность принадлежности прогнозируемого объекта
по |
s-му параметру к |
λ-му классу |
P(Rλ/ξs). Данную меру целесообразно |
||||||
определять по формуле Байеса с введением весовых коэффициентов |
|||||||||
|
|
|
k |
êéP(ξs / Rλ )úù |
1 / γs |
||||
|
|
P(Rλ )× Õ |
|
|
|
||||
|
r |
s=1 |
ë |
|
û |
|
|
|
|
|
P(Rλ /ξ ) = |
|
|
|
|
|
|
|
, |
|
|
|
|
|
|
|
|
||
|
|
m |
k |
êéP(ξs / Rλ )úù |
1 / γs |
||||
|
|
åP(Rλ )× Õ |
|
|
|||||
|
|
λ=1 |
s=1 |
ë |
|
û |
|
|
|
где γs - корректировочный коэффициент, определяемый на стадии обучения. Применение коэффициента γs позволяет повысить точность прогнозирования
состояния объекта. Количественные значения γs выбираются в зависимости из физической ценности (важности, значимости) параметров, степени флуктуации и др., т.е. большей частью субъективно или экспертными оценками [7, 19 ].
87
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
5. ОЦЕНКА ЭФФЕКИВНОСТИ ФУНКЦИОНИРОВАНИЯ СЛОЖНЫХ РАДИОТЕХНИЧЕСКИХ СИСТЕМ
Для оценки эффективности функционирования радиотехнических устройств и
систем |
с |
учетом |
их |
обеспечения |
контролепригодностью |
необходимо |
||
определить |
аналитические зависимости |
показателей |
контролепригодности, |
|||||
диагностирования |
и |
характеристик надежности. |
В частности, |
можно |
||||
определить |
зависимости |
показателей |
достоверности |
функционирования, |
||||
коэффициента готовности, |
глубины и полноты диагностирования, |
вероятности |
||||||
безотказной работы электронных систем и комплексов. |
|
|
|
|||||
Под |
достоверностью |
работы радиотехнических устройств |
и |
систем |
||||
понимается свойство, характеризующее истинность выходного результата работы устройства (системы), которая определяется способностью средства контроля и диагностики фиксировать истинные состояния ОКД. Достоверность работы устройства (системы) включает понятия достоверности функционирования Dф, достоверности правильного функционирования Dпф и достоверности ошибочного
функционирования |
Dоф [ 9, 31 ]. |
|
|
|
|
Достоверность |
функционирования Dф является |
условной вероятностью |
|||
того, что средства |
контроля |
и |
диагностики (КД) |
отображают |
истинный |
результат работы устройства |
или |
системы при условии пропуска |
ошибки |
||
средствами КД и при наличии ложного сигнала ошибки на выходе средств КД:
|
|
Dф = |
Pпр |
|
+ |
Pн |
|
, |
|
|
|
|
|
|
|
|
|
(5.1) |
|||
|
|
|
|
|
|
|
||||
|
|
|
|
Pпр + |
Pнр |
+ Pло |
+ Pно |
|
||
где |
Pпр |
- |
вероятность правильной |
(безошибочной) работы |
устройства |
|||||
(системы); |
Pнр |
- вероятность неправильной работы системы, о чем показывает |
||||||||
сигнал ошибки; Pло - вероятность ложного отказа системы; Pно - вероятность |
||||||||||
необнаруженного отказа системы. |
|
|
|
|
||||||
Знаменатель (5.1) отображает полную группу событий и равен |
единице, |
|||||||||
поэтому (5.1) принимает вид |
|
|
|
|
|
|
||||
|
|
|
|
Dф = Pпр |
+ |
Pнр. |
|
|
(5.2) |
|
Из |
уравнения (5.1) следует, |
что |
|
|
|
|
||||
88
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
Dф = 1 − ( Pло |
+ |
Pно ) . |
|
|
|
|
(5.3) |
||||
Достоверность |
правильного |
функционирования |
Dпф |
является условной |
|||||||||
вероятностью, того, что система работает правильно |
при условии пропуска |
||||||||||||
отказа средствами контроля и диагностирования: |
|
|
|
|
|
||||||||
|
|
|
Dпф = |
|
Pпр |
|
. |
|
|
|
|
(5.4) |
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
||||||
|
|
|
|
Pпр |
+ |
Pо |
|
|
|
|
|
||
С учетом коэффициента готовности |
Кг |
достоверность |
Dпф имеет |
||||||||||
вид [ 10 ] |
|
|
|
|
|
|
|
|
|
|
|
|
|
Dпф |
= |
Кг × Кп × [ 1 − ( Pло + Pно ) ] |
|
, |
|
||||||||
|
|
|
|
|
|
|
|
|
|
(5.5) |
|||
Pло × Кг |
+ Кп × ( 1 − Pно ) |
|
|
|
|||||||||
|
|
|
|
|
|
|
|||||||
где Кп - коэффициент простоя, равный |
Кп = ( 1 - |
Кг ). |
|||||||||||
С учетом уравнения (5.3) |
выражение (5.5) имеет вид |
|
|||||||||||
|
Dпф = |
|
Кг × |
Кп × |
Dф |
|
|
. |
|
|
|||
|
|
|
|
|
|
|
|
|
|
(5.6) |
|||
|
Pло × Кг × Кп × ( 1 - Pно ) |
|
|||||||||||
|
|
|
|
|
|||||||||
|
|
|
|
|
|
||||||||
Достоверность ошибочного функционирования системы есть условная вероятность его неправильной работы при условии выдачи ложного сигнала ошибки средствами контроля и диагностики
Dоф = |
|
Pнр |
|
. |
|
|
|
|
(5.7) |
||
|
|
|
|||
Pнр |
+ |
Pоло |
|
||
Предполагается, что радиотехническая система условно разбита |
на N |
||||
составных частей (блоков) bi , |
i = 1,…, N, согласно принятому |
уровню |
|||
деления, с точностью, до которой требуется определить место дефекта. |
Пусть в |
||||
процессе выполнения задачи контроля и диагностики СКД проверяет по принципу " норма - не норма " совокупность N статистически независимых
параметров |
w i c определенными априорными вероятностями p(wi) в пределах |
допуска и |
p(wi)нд = 1 - p(wi ) не допуска. |
|
89 |
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
При проверке i-го параметра могут быть ошибки первого рода с условной
вероятностью ai и второго рода с условной вероятностью bi . Значение совокупностей N параметров определяют состояния объекта диагностики, количество которых равно 2N .
Согласно равенству [31], вероятности ложного отказа Рлок системой КД и необнаруженного отказа Pнок системой КД соответственно определяются
выражениями
Pлок |
k |
(1 |
k |
=[1- Õ |
- αi )]×Õp(wi ) , |
||
|
i=1 |
|
i=1 |
k
Pнок = Õ[p(wi )×(1- αi ) + (1- p(wi ))×βi ]-
i=1
k
- Õ[(1- p(wi )×(1-αi )]
i=1
В выражениях (5.8) и (5.9) |
k < |
N , т. к. выбираются только наиболее |
информативные параметры |
wi , |
i Î N. |
Достоверность принятия |
решения о состоянии ОД системой КД |
|
аналогии (5.3) и с учетом (5.8) и (5.9) имеет вид
(5.8)
(5.9)
по
Dпрк |
k |
k |
[p(wi )×(1 |
- αi ) + |
=1- Õp(wi ) - Õ |
||||
|
i=1 |
i=1 |
|
|
k
+ (1- p(wi ))×βi ]+ 2Õ p(wi )×(1- αi )] (5.10)
i=1
Согласно условию [ 9 ], достоверность функционирования радиотехнической
системы определяется выражением
|
Dф = Pсис × Pк + Pобн |
- Pδсис × Pобн , |
(5.11) |
||
где Pсис |
- вероятность безотказной работы радиотехнической системы; Pк - |
||||
вероятность безотказной работы системы КД; |
Pобн |
- вероятность обнаружения |
|||
дефектов |
выбранным методом |
контроля |
и |
диагностики; |
δ- параметр, |
определяемый как |
|
|
|
|
|
|
δ = γпк× Ки / |
Pобн . |
|
|
(5.12) |
90
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com