

Вешкурцев- Бычков АСКиД РЭС
.pdfЕсли признаки ОКД обозначить xj |
, j = 1,2,..., N , то каждый |
объект в N-мерном |
||
пространстве признаков может |
быть |
представлен |
в виде |
вектора |
x = (x1 , x2 ,..., xN ), координаты |
которого |
характеризуют |
свойства |
объекта. |
Далее определяется мера близости по евклидовой метрике [24]
|
|
|
|
d 2 (ωpk ,ωql ) = åN (x(pkj ) − xql( j ) )2 |
, |
|
(3.2) |
|||||
|
|
|
|
|
|
|
j=1 |
|
|
|
|
|
p, q = 1,2,..., m; k =1,2,...,kp ; l =1,2,...,kq ; j = 1, …, N; |
|
|
||||||||||
где |
x( j) |
- значение j –го признака k –го объекта |
p- го класса; |
x( j) |
- значение |
|||||||
pk |
ql |
|||||||||||
j-го признака l–го объекта |
q- го класса. |
|
|
|
|
|||||||
|
Мера близости между всеми объектами данного класса [25 ] |
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
kp kp |
|
|
|
|
|
|
S(A p ) = |
× |
ååd 2 (ω pk ,ωql ), |
|
p = 1,2,..., m . |
(3.3) |
||||||
|
|
|
|
|||||||||
|
|
|
|
kp |
k p−1 k =1 l=1 |
|
|
|
|
|||
Данная мера близости называется средним квадратичным разбросом класса. Мера близости между классами составит [25]
|
|
|
|
|
|
|
|
R(Α p ,Αq )= |
1 |
k p kp |
(ω pk ,ωql ), |
|
|
||
ååd 2 |
p,q = 1,2,...,m . |
(3.4) |
|||||
|
|||||||
|
k p kq k =1 l=1 |
|
|
|
|
||
Данная мера называется среднеквадратичным разбросом классов Α p Совокупность признаков объектов, используемых в рабочем словаре
признаков, можно описать N-вектором λ = (λ 1, λ2 , .., λN ), компоненты которого принимают значения "1" или "0" в зависимости от того имеется или отсутствует возможность определения соответствующего признака объекта.
С учетом λ метрика между двумя объектами имеет вид [25]
N |
|
d 2 (ωpk , ωql ) = å λ j (x(pkj ) − xql( j ) )2 . |
(3.5) |
j =1 |
|
При построении рабочего словаря признаков исходят из того, что затраты на создание средств измерений пропорциональны их информативности. Это предположение носит достаточно общий характер. Поэтому затраты на создание средств измерений определяются выражением [25]
N |
|
C = C(λ1, λ2 , K , λ m = å C j λ j , |
(3.6) |
j =1 |
|
где Cj - затраты на создание технического средства, обеспечивающего определение j–го признака.
71
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

В качестве критерия качества или эффективности системы контроля и диагностики при построении рабочего словаря признаков вводится функционал, зависящий от функций S (Ap) , R (Ap , Aq) и решающего правила L (ω, {ωg}),
|
Ф = F[ S (A p); R (A p |
,A q); L (ω, {ωg})], |
(3.7) |
||||||||
где L (ω, {ωg}) – мера близости между |
ω |
и классом A g , g =1, …, m . Она |
|||||||||
определяется выражением [25] |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
k |
|
|
|
|
||
|
L(ω,{ωg }) = |
åd 2 (ω,ωg ) |
. |
(3.8) |
|||||||
|
|
|
k |
||||||||
|
|
|
|
|
g=1 |
|
|
||||
Решающее правило состоит в следующем: |
|
|
|
|
|||||||
ω Ag , если L (ω, {ωg}) = extr L (ω, {ωi}) . |
|
||||||||||
|
|
|
|
|
|
|
i |
|
|
|
|
Уменьшение |
величины |
метрики |
|
|
S(Ap), т.е. сжатие |
объектов, |
|||||
принадлежащих |
данному |
классу, при |
одновременном увеличении |
метрики |
|||||||
R(Ap, Aq), т.е. |
разделение |
объектов, |
принадлежащих разным |
классам, |
|||||||
обеспечивает улучшение качества |
контроля. |
Поэтому повышение эффективности |
|||||||||
контроля определяется достижением экстремума функционала Ф(×) Таким образом, выбор рабочего словаря признаков является оптимизационной задачей
и определяется правилом
extr Ф = extr F [ S (Ap); R (Ap |
, Aq); L (ω, {ωg})], |
(3.9) |
|
λ |
λ |
|
|
|
N |
|
|
при условии затрат |
C=åCj λj ≤ C0 , |
где C0 –допустимые затраты. |
|
j=1
3.2. Метод, основанный на количестве информации
Данный метод наиболее распространен при рекуррентном отборе признаков диагностирования. Рассмотрим принцип отбора наиболее информативного признака.
Пусть имеем признаки xl , l = 1, …, N. Распознаваемый объект может принадлежать лишь одному из m классов, априорные вероятности отнесения
72
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
этого объекта к определенному |
классу известны P(Ai) , P(Aj), |
i, j,=1,2, …, m, |
||
также |
известны плотности |
вероятности |
значений |
признаков |
f(xl /Aj), f(xs /Aj) .
До проведения диагностического эксперимента исходная энтропия ОКД
m |
|
H0 = -å P(Ai ) log 2 P(Ai ). |
(3.10) |
i =1
Определим, какое количество информации получает система диагностики при измерении признака xl .
Если признак xl принимает дискретные значения с вероятностями
|
m |
|
|
|
|
P(xl ) |
= å P(Α j )P(xl |
/ Α j ), |
k = 1,..., nl , |
(3.11) |
|
k |
j =1 |
k |
|
|
|
|
|
|
|
|
|
то полная средняя условная энтропия системы распознавания при измерении всех возможных значений признака xi
|
(B x |
)= - m |
P(A ) m nl |
P(x |
|
A |
|
)× P(A |
|
x |
|
)log |
|
P(A |
|
x |
|
) |
|
|
H |
lk |
j |
i |
lk |
2 |
i |
lk |
. |
(3.12) |
|||||||||||
|
l |
å |
i åå |
|
|
|
|
|
|
|
|
|||||||||
|
|
j=1 |
i=1 k =1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Если проведены диагностические эксперименты, связанные с определением признака, рассчитаны апостериорные вероятности отнесения объекта к соответствующим классам, то количество информации, которое получает система в результате проведения экспериментов:
J xl = Ho − |
|
(B xl ). |
|
H |
(3.13) |
Когда проведено h диагностических экспериментов с h признаками ( h < N) , то
наиболее информативный признак находится из выражения
x |
= arg max J x . |
(3.14) |
|
|
i 1,h |
i |
|
Если признак xl |
непрерывный, то его совместная плотность вероятности |
||
m
f (xl ) = åP(Α j )f j (xl ),
j=1
где f j (xl ) – условная плотность распределения признака xi в классе
Значение полной средней условной энтропии системы после признака xl
(3.15)
Aj .
измерения
73
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
m |
m |
|
|
|
|
|
(B xl )= -åP(Ai )å |
ò fl (xl )P(Ai |
xl )×log2 P(Ai xl )dxl , |
|
|
|
H |
(3.16) |
||||
|
|
j=1 |
i=1 G (x ) |
|
|
|
|
|
|
i |
l |
|
|
где Gi – область изменения признака xl в |
классе Ai . |
|
||||
Количество информации, которое получает система в результате проведения
экспериментов над ОКД с измерением всех возможных значений непрерывного признака :
|
|
|
m |
|
J xl = H0 |
− |
|
(B xi ) = −å P(Αi ) log 2 P(Αi ) + |
|
H |
|
|||
|
|
|
i =1 |
|
m |
|
m |
|
|
+ åP(Ai )å ò fl (xl )P(Ai xl )× log2 P(Ai xl )dx . |
(3.17) |
|||
j=1 |
|
i=1 Gi (xl ) |
|
|
3.3. Метод, основанный на сравнении вероятностных характеристик признаков
Сравнительная оценка качества признаков может быть произведена и в случае, когда условные плотности вероятности fi (xl ) не известны, однако
известны первые (математическое ожидание) и вторые (дисперсия) моменты этих
распределений: mli |
и |
Dli = σ li2 . Оценка, основанная на использовании этих |
|
данных, возможна |
в |
связи |
с тем, что признаки xl могут быть условно |
подразделены на две группы. |
|
||
К первой группе относятся признаки, значения которых незначительно
изменяются при переходе от одного объекта данного класса к другому объекту и достаточно заметно изменяются при переходе от объекта одного класса к объектам других классов.
Ко второй группе относятся признаки, значения которых чувствительны к
переходам от объекта к объекту данного класса и лишь незначительно изменяются при переходах от объектов одного класса к объектам других классов.
Признаки первой группы информативней признаков второй группы. Количественная оценка меры полезности или качества признаков xl,
l=1, 2, …, N , может быть произведена следующим образом. |
|
|||
Пусть |
появление |
значения |
l–го признака соответствует |
априорным |
вероятностям P(Ai) (i |
= 1, …, k) |
классов Ai . Определяется математическое |
||
ожидание |
некоторого признака, принимающего значения m li с вероятностью |
|||
P (Ai): |
|
k |
|
|
|
|
|
|
|
|
M { m ji } = å m li P (Ai), |
(3.18) |
||
|
|
i=1 |
|
|
и математическое ожидание дисперсии l–го признака по классам
74
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
k |
|
M{Dli } = åσ li2 P(Ai ) , |
(3.19) |
i = 1
где M {×} – знак статистического среднего.
Если M {Dil} < M {DSi} , l, s = 1,…, N, то при равных условиях качество признака xs выше, чем качество признака xl , так как вдоль оси признака объекты
располагаются компактней, чем вдоль оси признака xs .
Дисперсия математического ожидания распределений признаков при
переходе от класса к классу имеет вид |
|
||||||
|
|
|
|
|
|
li = M{[mli − M(mli )]2 }. |
(3.20) |
|
|
|
|
|
D |
||
Если |
|
li > |
|
si , то при равных условиях качество признака |
xl выше, чем |
||
D |
D |
||||||
признака |
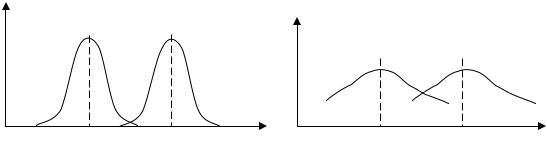
xs, так как вдоль оси признака xl объекты, относящиеся к разным |
||||||
классам, располагаются дальше друг от друга, чем на оси признака xs. Геометрически это показано на рис.3.1.
f (xl ) |
f1 |
(xi ) |
f2 |
(xi ) |
|
|
|
|
f1 |
(xs ) |
f2 (xs ) |
||||
|
|
|
|||||
|
|
|
|
|
m(xl1) |
m(xl2) |
xl |
m(xs1) m(xs2) |
xs |
Рис. 3.1. Качество признаков в зависимости от |
|
|||
вероятностных |
характеристик |
|
||
В качестве критерия сравнительной оценки признаков используется
отношение [25] |
|
|
|
|
|
|
|
|
|
Ψl |
= |
M[D |
li ] |
, |
|
|
(3.21) |
||
|
|
|
|
||||||
|
|
|
|
|
|||||
|
|
|
Dli |
|
|
|
|
|
|
при этом наилучший признак выбирается из выражения |
|
||||||||
x0 = |
|
|
|
éM[Dli ]ù |
|
||||
arg minê |
|
|
|
ú . |
(3.22) |
||||
|
Dli |
||||||||
|
|
|
l ë |
|
û |
|
|||
75
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
4. ПРОГНОЗИРОВАНИЕ СОСТОЯНИЙ ТЕХНИЧЕCКИХ СИСТЕМ
Проблемы прогнозирования состояний ТС имеют различные аспекты (философский, физический, математический и др.), которые раскрывают их с разных сторон и дают определенные предпосылки к успешному решению.
С философской точки зрения всякое научное предвидение представляет собой экстраполяцию (распространение) известных законов, материальных условий или типов взаимодействия на область рассматриваемых явлений, недоступных по какой-либо причине экспериментальному изучению. Точность предвидения во многом зависит от того, какой закон подвергается экстраполяции и насколько правильно и полно он познан.
Физическая картина изменения состояния технических систем является научной основой, объясняющей происходящие количественные изменения в объекте и возможный переход ее в другое качественное состояние.
К общим физическим моделям отказов и процессов их возникновения относятся, например, деформация и механическое разрушение различных материалов; электрическое разрушение диэлектрических материалов; тепловое разрушение элементов; электрохимическая коррозия; электротермическая эрозия; радиационное разрушение и т.д.
Математические вопросы проблемы прогнозирования являются самыми важными, так как успешное осуществление прогнозирования зависит прежде всего от правильности формулировки и постановки задачи.
Различают три основных класса методов прогнозирования состояния технических систем [5, 8, 33].
1.Методы аналитического прогнозирования (АП).
2.Методы вероятностного прогнозирования (ВП).
3.Методы прогнозирования, основанные на статистической классификации (или распознавании образов).
4.1. Метод аналитического прогнозирования
Пусть контролируемый процесс, характеризующий состояние объекта,
представлен в виде многомерной векторной функции
ξ (t)= ξ1 (t),...,ξk (t),
которая наблюдается (дискретно или непрерывно) в период времени от t0 = 0 до tn в области T1. Известны значения этой функции
ξ (t0 ),ξ (t1 ),...,ξ (ti ),...,ξ (tn )
соответственно в моменты времени t0 , t1 ,..., tn T1 . Необходимо по известным
76
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
ξ(ti ) определить (предсказать) значения функции
ξ(tn+1 ),...,ξ (tn+ j ),...,ξ (tn+m )
вмоменты tn +1 ,..., tn + j ,..., tn + m T2 , T2 – область будущих моментов времени.
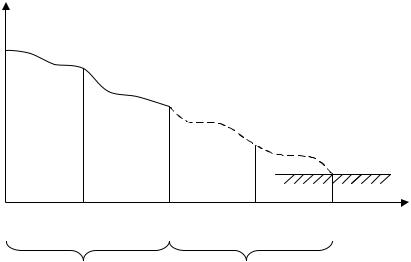
Подобная постановка задачи справедлива в предположении, что рассматриваемый процесс инерционен во времени и все изменения, проходящие в прошлом, постепенно накапливаются, т.е. существует явная необратимость процесса (рис.4.1).
ξ
ξ (t0 ) ξ (ti )
ξ (tn )
ξ (tn+i |
) |
ξ (tn+ j |
) |
|
|
|
|
|
|
ξ * |
|
|
|
|
дон |
|
|
|
tn+ j |
t |
t0 |
ti |
tn |
tn+m |
T1 |
T2 |
Рис.4.1. Контролируемый процесс
Идеальным случаем решения поставленной задачи является адекватное описание изменений функции ξ (t) каким-либо аналитическим выражением. Например, в качестве экстраполяционных полиномов могут быть использованы:
полином Лагранжа
Fn (t) = Ln0 ξ (t0) + Ln1 ξ (t1) + … + L ni ξ ( ti ) + … + L nn ξ (tn) , tn T1,
|
j= n |
(m + |
j ) |
|
|
∏ |
|||
|
j =0 |
-i |
|
|
Li = |
j ¹ n |
|
, |
|
j= n |
(i − |
|
||
|
∏ |
j ) |
||
|
i= 0 |
|
|
|
|
i¹ j |
|
|
|
77
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
где Li – коэффициент Лагранжа , i, j –индексы интервалов времени T1,T2 ;
полином Ньютона
|
|
|
Fn (t) = ξ (tn ) + |
(1)ξn −1N1 |
|
+ (2)ξn −2 N2 + (3)ξn −3N3 + |
||||||
|
|
|
+ .... + |
(k )ξn −k Nk , |
|
|
||||||
|
|
|
|
|
1 |
|
k =μ |
|
|
|||
|
|
|
|
N k = |
|
∏(m − 1 + k), |
||||||
|
|
|
|
k! |
||||||||
|
|
|
|
|
|
k =1 |
|
|
||||
где |
(k )ξn − k = (k −1)ξn − |
(k −1)ξk |
|
– конечные разности k-го порядка [30]; |
||||||||
m - количество шагов прогнозирования; |
|
|
|
|||||||||
полином или ряд Тейлора |
|
|
|
|
|
|
|
|
|
|||
|
|
|
FT (t)= ξ (tn )+ ξ ′(tn )Q1 + ξ ′′(tn )Q2 + ... + ξ k (tn )Qk , |
|||||||||
где |
ξ k (t |
n |
) – k-я производная в точке t |
|
; |
Q = |
mk |
– коэффициент Тейлора; |
||||
n |
|
|||||||||||
|
|
|
|
|
|
|
|
k |
k! |
|||
|
|
|
|
|
|
|
|
|
|
|
||
m - количество шагов прогнозирования.
При аналитическом прогнозировании необходимо решать следующие вопросы:
- выбор оптимального выражения F(t) с учетом тенденции изменения
инерционности процесса (или деградационного процесса);
- оптимальное определение неизвестных коэффициентов в F(t),
позволяющие получить более точный прогноз;
- введение в многочлен F(t) адаптационных коэффициентов, позволяющих корректировать текущее прогнозирование.
Пример аналитического прогнозирования
Проиллюстрируем аналитическое прогнозирование на основе метода обобщенного параметра следующим примером.
Пусть в течение 250 ч испытывалось радиотехническое устройство (РТУ), у которого контролировалось 6 параметров. В результате этого испытания получены следующие результаты ( табл. 4.1)
78
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
|
|
|
|
Таблица 4.1 |
|
|
|
|
|
|
|
|
|
|
Iнном = 9,5A |
-Ug1ном= |
Sном= 6 мкA/B |
Iа ном = 2 мкA |
-Ig3ном= |
P ном = 900 Bт |
|
t, ч |
Iн max =10,5 A |
=120 B |
Smin=4,5 мкA/B |
Ia max = 15 мкA |
=70 мкA |
Pmin = 650 Bт |
|
-Ug1max= |
-Ig3max= |
||||||
|
|
|
|
|
|||
|
|
=140 B |
|
|
=110мкA |
|
|
0 |
10 |
126 |
5,4 |
2 |
76 |
814 |
|
|
|
|
|
|
|
|
|
125 |
10 |
131 |
5,4 |
4 |
88 |
874 |
|
|
|
|
|
|
|
|
|
250 |
10 |
136 |
5,2 |
5 |
84 |
870 |
|
|
|
|
|
|
|
|
Проведем нормирование значения каждого параметра табл.4.1 по выражению
_ |
ξ s(t) − ξs max |
_ |
|
|
ξ s(t) = |
|
, |
ξ s(t) [0,1] , |
(4.1) |
|
||||
|
ξ опт− ξs max |
|
|
|
где ξ s(t) – текущее значение параметра ; s – номер параметра, s = 1,…,k;
ξопт – номинальное или оптимальное значение параметра; ξs max – максимальное (или минимальное) допустимое значение параметра, после которого РТУ выходит из строя.
В результате выполнения операции (4.1) получим приведенные значения параметров (табл.4.2), взятых из табл. 4.1.
|
|
|
|
|
|
|
Таблица 4.2 |
|
|
|
|
|
|
|
|
t, ч |
Î н |
−Ûg |
Ŝ |
|
Îao |
− Îg3 |
|
|
P |
||||||
0 |
0,5 |
0,7 |
0,6 |
|
1 |
0,85 |
0,656 |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
125 |
0,5 |
0,45 |
0,6 |
|
0,846 |
0,55 |
0,897 |
|
|
|
|
|
|
|
|
250 |
0,5 |
0,2 |
0,466 |
|
0,769 |
0,65 |
0,88 |
|
|
|
|
|
|
|
|
P |
|
|
|
|
|
|
|
|
|
|
|
79 |
|
|
|
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Степень работоспособности объекта по множеству контролируемых параметров оценивается с помощью обобщенного параметра по следующим выражениям [8]:
линейное среднее
|
k |
_ |
|
|
|
QS (t) = |
åν s |
×ξs (t) |
QS (t) Î[0, 1], |
|
|
S=1 |
|
, |
(4.2) |
||
k |
|
||||
|
åν s |
|
|
||
|
S=1 |
|
|
||
где ns – весовое значение каждого параметра, ns Î [0, 1]. При этом
k
å ns > 0;
s=1
|
k |
_ |
|
нелинейное среднее 1 |
Q å(t) = {k-1å [ x s(t) ]1/ νs}å νs ; |
||
|
s=1 |
|
|
|
k _ |
|
k |
нелинейное среднее 2 |
Q å(t) = {å [ x s(t) |
] 1/ ns} / å ns ; |
|
|
S=1 |
|
S =1 |
|
|
k |
_ |
параметрическое среднее |
Q å(t) = { k -1 |
å [ x s(t) ] p/ ns}1/p , |
|
s=1
(4.3)
(4.4)
(4.5)
где p ³ 1 – подбирается так, чтобы оценка (4.5) давала лучшее приближение к результатам, полученным экспериментальным путем.
Для решения нашего примера будем полагать, что веса параметров ns принимают следующие значения:
n1(Iн) = 0,05; n2(Ug1) = 0,20; n3(S) = 0,25; n4(Iao) = 0,15; n5(Ig3) = 0,1; n6(P) = 0,25.
k
Здесь åν S = 1, т.е. соответствует вероятностной мере.
S =1
Для вычисления степени работоспособности, данного РТУ воспользуемся выражением (4.2), в результате проведенных вычислений получим табл.4.3
обобщенных параметров (табл.4.3) .
80
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com