

Вешкурцев- Бычков АСКиД РЭС
.pdfвыбирается x1x2 в качестве установочного набора, который не зависит от
предыдущего состояния. При окончательном формировании тестов необходимо учитывать возможность состязаний в ОКД, во избежание которых следует допускать изменение лишь одной переменной в соседних наборах.
С учетом сказанного выше тесты неисправностей x1 1 , x1 0 |
и других |
неисправностей пути P1 создают два набора: |
|
T − { x1x2 или 01 x1x2 или 11.
Аналогичным образом определяются тесты неисправностей для остальных путей схемы: P2 = {x1, y1 , y2 , y3 , F}, P3 = {x2 , y1, F} P4 = {x2 , y1 , y2 , y3 , F}, P5 = {x2 , y2 , y3 , F}.
2.8.5. Статистическая модель объекта диагностики
РЭС, как объекту диагностики, свойствен переход из работоспособного состояния в неработоспособное в случайные моменты времени. Такие переходы являются случайным процессом, который достаточно близко к реальным условием представляется Марковским процессом [1, 21 ].
Объект диагностики описывают Марковским процессом в виде набора дискретных состояний S1,..., Sn , который можно проиллюстрировать с помощью графа , например, для пяти состояний (рис. 2.17)
S1 |
λ41 |
S4 |
|
λ14 |
|||
λ12 |
|
||
|
λ34 |
λ54 |
|
λ23 |
λ35 |
S5 |
|
S2 |
S3 |
Рис. 2.17. Граф пяти состояний
Марковский процесс с дискретными состояниями и непрерывным временем описывается системой дифференциальных уравнений Колмогорова-Чепмена
dP1 |
/dt |
= λ 31P3 |
+ λ 41P4 |
− (λ12 + λ14 )P1; |
dP2 |
/dt |
= λ12 P1 |
− λ 23 P2 ; |
|
dP3 /dt = λ 23 P2 − (λ 35 + λ 31 + λ34 )P3 ; |
||||
dP4 |
/dt |
= λ34 P4 |
+ λ54 P4 |
+ λ14 P1 − λ 41 P4 ; |
41
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
dP5 /dt = λ 35 P3 − λ54 P5 ; P1 + P2 + P3 + P4 + P5 = 1,
где Рi- вероятность нахождения ОД в состоянии Si ; λi j - интенсивность перехода из состояния Si в состояние S j .
Марковский процесс может быть представлен также в матричном виде:
|
P11 |
P12 |
P13 |
.. |
|
P = |
P21 |
P22 |
P23 |
.. |
, |
P31 |
P32 |
P33 |
.. |
||
|
.. |
.. |
.. |
.. |
|
где Pi, j – вероятность перехода РЭС из состояния Si в состояние Sj. |
|||||
Более полное описание |
переходов |
состояний |
Si реальных систем с |
||
периодическим контролем содержится в полумарковском процессе, в котором
переходы |
Si в состояние S j ( j = |
1, n |
) |
совершаются |
в случайные |
моменты |
||
|
ti (i = |
|
) . Таким образом, |
|
|
|
||
времени |
1, n |
в отличие от |
марковского |
процесса |
||||
(однородного), полумарковский процесс (неоднородный марковский) задается
двумя матрицами
|
Fi, j (t) |
|
|
Pi, j |
|
и |
|
|
|
Fi, j (t) |
|
|
|
, |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
где |
– функция распределения вероятности |
временного интервала |
|||||||||||||||
τ (i, |
j) = (tk + 1 |
− tk ) , равноного времени перехода |
РЭС из состояния Si |
в |
|||||||||||||
состояние S j . |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
распределения τ (i, j) |
|
|
|
В диагностических моделях рассматриваются |
два |
– |
||||||||||||||
непрерывное и дискретное. При непрерывном распределении предполагается, что существует функция fi, j (t), для которой
Fi, j (t) = ò0t fi, j (x)dx .
При дискретном распределении Fi, j (t) – ступенчатая функция.
|
2.8.6. Нечеткие модели в системе диагностики |
|
|
|||
Подход |
к объекту исследования с позиций |
теории |
нечетких |
(fuzzy) |
||
множеств основывается на предположении, |
что элементами мышления человека |
|||||
являются не числа, а словесные описания, |
т.е. |
элементы нечетких множеств и |
||||
нечетких классов, для которых переход от "принадлежности к |
классу" |
к "не |
||||
принадлежности" не скачкообразен, а непрерывен [ 6, 7]. |
|
|
||||
ОПРЕДЕЛЕНИЕ 2.1. Пусть X - произвольное непустое множество. |
||||||
Множество |
A={ (μA (x), x) /x X } называется нечетким множеством в |
|||||
множестве |
X, если каждый элемент множества |
A |
есть пара, на первом месте |
|||
|
42 |
|
|
|
|
|
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
которой стоит значение функции μA:X→[0,1], называемой функцией принадлежности элементов из X множеству A , а на втором - элемент x X, для которого эта функция определена. Здесь и в дальнейшем знак равенства (=) означает "равно по определению" или "численные значения совпадают". Иначе говоря при задании множества A каждому x X приписывается число из интервала 0 ≤ μА (x) ≤ 1 , определяющее степень принадлежности этого числа множеству A .
ОПРЕДЕЛЕНИЕ 2.2. Базовое множество есть произвольное непустое
множество X . Например, |
X = { x1, x2, x3, x4, x5, x6, x7, x8, x9 }: |
МНОЖЕСТВО |
||||||
ЛЮДЕЙ, МНОЖЕСТВО АВТОМОБИЛЕЙ, |
МНОЖЕСТВО РАДИОДЕТАЛЕЙ, |
|||||||
МНОЖЕСТВО ЧИСЕЛ и |
т.д. Это |
множество |
X |
можно формально |
||||
рассматривать как нечеткое множество, если каждому |
x X |
приписывать |
||||||
значение μ X (x)=1. |
|
|
|
|
|
|
|
|
ОПРЕДЕЛЕНИЕ 2.3. Носителем нечеткого множества |
A |
называется |
||||||
подмножество supp A , содержащее те элементы из |
X |
для, которых значение |
||||||
функции принадлежности |
μA(x) > 0, |
supp |
A |
X |
. Здесь знак |
означает |
||
"включает или равно". Нечеткое множество A |
в |
X |
само может быть пустым и |
|||||
обозначается |
, если для всех x X значение μ (x) = 0. Тогда носитель suppA |
|
пустого нечеткого множества A также пустое множество. |
|
|
Например. Предположим X = { x1, x2, x3, x4, x5, x6, x7, x8, x9 }. |
Множества A = |
|
={0,1/x2; 0,3/x3; 0,6/x4; 1/x6; 0,9/x7 } и B = { 1/x1; 0,4/x3; 0,2/x5; 0,1/x8} являются |
||
нечеткими в |
множестве X . Носителями множеств A и |
B соответственно |
служат множества supp A = { x2, x3, x4, x6, x7, } и supp B = |
{ x1, x3, x5, x8, }. |
|
Приведём еще несколько примеров, раскрывающих смысл нечетких множеств. Пусть X = { Коля, Маша, Петя, Вася, Аня, Юля, Наташа, Дима } - множество
детей. Тогда нечеткое множество A = {СИЛЬНЫЙ УЧЕНИК } может быть определено с точки зрения учителя по математике Aм = {0,1/Коля; 0,1/Маша; 0,3/Петя; 0,5/Вася; 0,8/Наташа; 1/Дима; 0,5/Аня; 0,1/Юля }, а с точки зрения учителя по пению - Aпе = {0,1/ Петя; 0,5/Маша; 1/Наташа; 0,8/Дима }. Здесь в качестве экспертов, назначающих баллы по способностям учеников, являются учителя. Для более точного построения функции принадлежности нечеткого
множества число экспертов обычно берется большим и их отбор является отдельной задачей.
Пусть X определяется интервалом [0, 100], каждое число которого x означает количество элементов (деталей) конструкции. Тогда нечеткие
множества
Aп = { ПРОСТАЯ КОНСТРУКЦИЯ }, Aс = { СЛОЖНАЯ КОНСТРУКЦИЯ } могут иметь вид:
Aп = {1/1; 0,9/5; 0,9/10; 0,8/15; 0,8/20; 0,7/25; 0,6/30; 0,5/35; 0,4/40; 0,3/45; 0,2/50; 0,1/55; 0/60 },
43
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Ac = {0,1/30; 0,1/35; 0,2/40; 0,3/45; 0,5/55; 0,6/65; 0,7/70; 0,9/85; 0,9/90; 1/100 } .
Пусть X определяется интервалом [1, 20], каждое число которого x означает количество сборочно-разборочных операций. Тогда нечеткие множества Bп = {ПРОСТОЙ МОНТАЖ}, Bc = {СЛОЖНЫЙ МОНТАЖ} могут иметь вид:
Bп = {1/1; 1/2; 0,9/3; 0,8/4; 0,8/5; 0,7/6; 0,5/7; 0,4/8; 0,3/9; 0,2/10; 0,1/11; 0/12 } ,
Bс = { 0,1/9; 0,2/10; 0,3/11; 0,4/12; 0,5/13; 0,6/14; 0,7/15; 0,8/16; 0,9/17; 1/18 } .
Функции принадлежности нечетких |
множеств |
Aп , Ac , |
Bп , |
Bc здесь |
|
определялись на основе опыта конструкторов . |
|
|
x - уровень |
||
Пусть X определяется интервалом [1, 3], каждое число которого |
|||||
электрического напряжения |
в |
вольтах. Тогда нечеткое множество |
|||
F = { УРОВЕНЬ СИГНАЛА ПРИМЕРНО ДВА ВОЛЬТА } имеет вид: |
|
||||
F = { 0/1; 0,1/1,2; 0,3/1,5; 0,6/1,6; 0,9/1,8; 1/2; 0,7/2,2; 0,3/2,4; 0,1/2,5 }. |
|||||
В данном примере функция |
принадлежности |
множества |
F |
оценивается |
|
экспертом-электронщиком в зависимости от требуемой стабильности источника питания для микросхем.
Приведем более сложную задачу технического диагностирования, реализованную на нечетком подходе, используя методики [22, 23 ].
Рассмотрим пример задачи принятия решений. Необходимо определить состояние распределенной радиоэлектронной системы (РЭС) в зависимости от показаний параметров (признаков) контроля системы и состояний внешней среды. Пусть радиоэлектронная система характеризуется тремя классами состояний:
работоспособной, предотказной и неработоспособной, т.е. невыполняющей свои функции с заданным качеством. Решение зависит от показаний параметров контроля (уровней напряжений, токов, мощности сигналов и помех,
коэффициентов ошибок, искажений и т.д.) |
и состояний внешней |
среды |
(электромагнитной обстановки, погодных |
условий, механических |
и |
электрохимических воздействий и т.д.), оценить которые точно часто невозможно. Определение или выбор состояния РЭС в дальнейшем будем
называть альтернативой. РЭС при различных показаниях параметров контроля и состояниях среды (или просто состояний признаков контроля и внешней среды) характеризуется различной полезностью (ценностью), анализ которой и позволит принять решение.
44
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Итак, имеется множество альтернатив |
A = { a 1, a2, …, a m }, выбор которых |
|||||||
зависит от состояний признаков : X = |
{ x 1, x |
2, |
… , x n}. Для различных |
|||||
альтернатив и возможных состояний |
признаков |
имеем априорную матрицу |
||||||
m n : |
|
|
|
|
|
|
|
|
|
|
x 1 , |
x 2 |
, … , |
x n |
|||
a1 |
|
u11 , |
u12 |
, … , |
u1n |
|
|
|
|
|
|||||||
a2 |
|
u21 , |
u22 |
, … , |
|
u2n |
|
|
U = |
|
( |
. . . |
|
|
|
(2.1) |
|
|
|
|
|
|
|
|
||
am |
|
um1 , |
um2 , … , |
|
umn |
|
. |
|
|
|
|
|
|
|
|
|
|
При известном апостериорном проявлении состояния признака xj X лучшей является альтернатива, имеющая наибольшую полезность:
a 0 |
= arg max uij . |
(2.2) |
|
i=1,..,m |
|
|
|
Если состояния признаков или полезности (ценности) известны нечетко, то
оптимальная альтернатива может быть представлена только в виде нечеткого множества Ão = {НАБЛЮДАЕТСЯ ПРИМЕРНОЕ МНОЖЕСТВО АЛЬТЕР-
НАТИВ ai ПРИ УСЛОВИИ ПРОЯВЛЕНИЯ НЕЧТКИХ ПРИЗНАКОВ xj X},
что описывается функцией принадлежности |
μà (ai) [0, 1]. Данное нечеткое |
множество можно представить также в виде |
|
Ão = μà (ai) / ai .
i
Априорное состояние признаков описывается нечетким множеством
X = μ~ (xk) / xk , xk X . |
|
k |
X |
|
|
(2.3)
(2.4)
В этом случае полезность альтернативы однозначно не может быть определена точно. Поэтому, воспользовавшись информацией о состоянии признаков,
определим нечеткое множество полезности (ценности) по каждой i-й
альтернативе в виде
Ũi = μŨ i ( uik ) / uik, |
(2.5) |
k
где ui k = x k |
и μŨ ( uk ) =μ~ (xk). |
|
Х |
Если некоторый элемент u области определения в ходе вычислений появится q раз с различными степенями принадлежности, то результирующая степень в (2.5)
принадлежности определяется по выражению
45
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
μk= μ1 + μ2 + … + μq , |
(2.6) |
где μ1 + μ2 = μ1 + μ2 - μ1 ×μ2 .
Выбор или определение оптимальной альтернативы основан на рассмотрении максимальной полезности (ценности) альтернативы и степени принадлежности ей различных значений полезности. При этом используется понятие максимизирующего множества. Сначала определяется множество Y, содержащее всевозможные значения полезности для данного нечеткого состояния признаков:
m |
|
Y = S ( Ui,), |
(2.7) |
i=1
где S(×) – определяет базовые значения множества. Затем вычисляется максимизирующее нечеткое множество полезности для альтернативы a i A по
выражению
Ũ im = μ Ũ i m ( uk ) /uk, |
(2.8) |
k
где μ Ũ im ( uk ) = ( u k : u max )n ; u max = sup Y; n – целое число, выбираемое в зависимости от решения задачи.
Далее определяется нечеткое множество Ũi0 на основе пересечения нечетких множеств Ũim и Ũ i :
μŨi0 (uk ) = min ( μŨim(uk ), μŨi (uk ) ); |
(2.9) |
|
~ |
(uk )/ uk . |
(2.10) |
Ũi0= μ Ũi0 |
||
k
В конце определяется оптимальное нечеткое множество альтернатив (2.3)
Ão = μÃo(ai) / ai ,
i
где степени их принадлежности определяются из выражения
|
μÃo(ai) = |
max μ Ũi0 (uk ) . |
|
(2.11) |
|
|
|
k |
|
|
|
|
|
|
|
|
|
Решение об |
оптимальной альтернативе |
или |
состоянии |
РЭС при условии |
|
наблюдения |
контролируемых |
признаков |
и |
состояния |
окружающей среды |
определяется формулой |
|
|
|
|
|
|
ao = arg max μà o(ai) , |
|
(2.12) |
||
|
|
i |
|
|
|
46
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
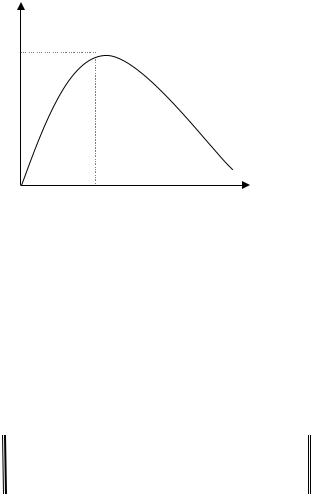
что иллюстрируется на рис. 2.18.
μà o
μà o max
ao ai
Рис. 2.18. Оптимальная альтернатива
Рассмотрим числовой пример. В данном примере будем иметь нечеткое проявление состояний признаков и четкие ценности (полезности). Пусть определено множество альтернатив (состояний РЭС) A = { a 1, a2, , a 3 }
соответственно работоспособное, предотказное и неработоспособное и
множество возможных признаков X ={ x 1, x2 , x 3, x 4, x 5, x 6, x 7 , x 8, x 9, x 10 }.
Априорная матрица полезностей имеет вид
|
a1 |
x 1, x2 , x 3, x 4, x 5, x 6, x 7 , x 8, x 9, x 10 |
||||||||||
|
9 |
7 |
2 |
2 |
3 |
1 |
7 |
8 |
8 |
4 |
|
|
U = a2 |
2 1 7 8 1 7 6 4 3 8 |
|
||||||||||
|
a3 |
6 4 3 4 5 |
6 8 5. 2 3 |
. |
||||||||
В процессе контроля состояние признаков оценивается нечетким множеством |
||||||||||||
|
~ |
|
|
0,8/ x4; |
1,0/ x 5 ; 0,7/ x6 ; 0,3/ x7 }. |
|||||||
|
X ={ 0,4 /x3 ; |
|||||||||||
Определим нечеткие полезности альтернатив |
ai |
|
при |
данном проявлении |
||||||||
состояний признаков: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Ũi = μ Ũ i ( uik ) / u i k, |
|
|
|
|
||||||
|
|
|
k |
|
|
|
|
|
|
|
|
|
причем μŨ ( uk ) = μ ~ (xk) |
и |
|
x k |
= ui k . |
|
|
|
|
|
|
||
|
X |
|
|
|
|
|
|
|
|
|
|
|
Ũ 1= { |
0,4/2 ; 0,8/2; |
1,0/ 3; |
0,7 / 1; |
0,3 / 7 |
}= |
|
|
|
||||
= { |
0,4 + 0,8 – 0,4 × 0,8 /2; 1,0/ 3; 0,7 / 1; 0,3 / 7 |
} = |
||||||||||
= { |
0.88 /2; |
1,0/ 3; |
0,7 / 1; |
0,3 / 7 |
}; |
|
|
|
|
|||
Ũ 2= { |
0,4/ 7; 0,8 / 8 ; |
1,0 / 1; |
0,7 / 7 |
0,3 / 6 |
} = |
|
|
|||||
|
|
|
|
|
47 |
|
|
|
|
|
|
|
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
= { 0,82 / 7; |
0,8 / 8 ; 1,0 / 1; 0,3 / 6 }; |
Ũ 3 = { 0,4/ 3; |
0,8 / 4 ; 1,0 / 5 ; 0,7 / 6; 0,3 / 8 }. |
Определим множество
Y = S (U1) S (U2 ) S (U3) =
= {2, 3, 1, 7 } { 7, 8, 1, 6 } { 3, 4, 5, 6, 8 }=
= { 1, 2, 3, 4, 5, 6, 7, 8 }.
Вычислим максимизирующие множества
|
|
|
|
Ũim = { μŨim ( uk ) /u k}, |
|
||||||||
|
æ uk |
ön |
|
|
|
|
|
|
|
|
|
||
причем |
μim (uk ) = ç |
|
|
÷ |
; |
|
|
|
|
umax |
= sup Y. |
||
|
|
|
|
|
|||||||||
|
è u max |
ø |
|
|
|
|
|
|
|
|
|
||
В рассматриваемом примере |
|
umax= sup Y = 8 , а |
n берется равным единице. |
||||||||||
Тогда |
~ |
|
ì |
2 |
/ 2 ; |
3 |
/3 ; |
1 |
/1; |
7 |
/ 7 |
ü |
|
|
U1m = í |
8 |
8 |
8 |
8 |
ý = |
|||||||
|
|
|
|
î |
|
|
|
|
þ |
||||
= { 0,25/2; 0,375 / 3; |
0,125 / 1; 0,875 / 7 }; |
||
Ũ2m = { 0,875/ 7; |
1 / 8; |
0,125 / 1; |
0,75 / 6 }; |
Ũ3m = { 0,375 / 3; |
0,5 / 4; |
0,625 / 5; |
0,75 / 6; 1 / 8 }. |
Далее находится оптимизирующее нечеткое множество Ũio для каждой
альтернативы |
ai : |
|
|
|
|
|
|
μŨio(uk ) = min ( μŨim (uk ), μŨi (uk ) ) ; |
|||
Ũ 10 = { min (0,25; |
0,88) / 2; |
min ( 0,375; 1,0 )/ 3; |
|||
|
|
min (0,125; 0.7)/1; min ( 0,875; 0,3)/ 7 } = |
|||
|
= |
{ 0,25 / 2; |
0,375 / 3; |
0,125 / 1; 0,3 / 7 }; |
|
Ũ 20 |
= |
{ 0,82 / 7; |
0,8 / 8; |
0,125 / 1; 0,3 / 6 }; |
|
Ũ 30 |
= |
{ 0,375/ 3; |
0,5 / 4; |
0,625 / 5; 0,7/ 6 ; 0,3 / 8 }. |
|
48
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Выполнив операцию максимум над каждым |
множеством Ũio , получим |
|||
степени принадлежности множества Ão : |
|
|
||
μà o(ai) = |
max μ ~ (uk ) |
; |
|
|
|
k |
Uio |
|
|
μà o(a1) = { max (0,25; 0,375; |
0,125; |
0/3 } = 0,375; |
||
μà o(a2) = 0,82; |
μà o(a3) = |
0,7. |
|
|
Запишем множество |
Ão = { 0,375 / a1; 0,82 /a2; |
0,7 /a 3 }. |
||
Взяв операцию arg max по данному множеству, |
находим лучшую альтернативу |
|||
a2 . Таким образом, по результатам проведенного контроля РЭС находится в предотказном состоянии, поэтому необходимо выполнять регулировочные работы для предупреждения реального отказа РЭС.
2.9.Методы распознавания состояний технических систем
Взависимости от математического описания модели объекта контроля и диагностики существуют следующие методы распознавания состояния технических систем (ТС): детерминированные, статистические (вероятностные) и методы, построенные на нечетких (fuzzy) концепциях.
2.9.1. Детерминированные методы
Детерминированные методы распознавания состояний ТС строятся на математическом аппарате, не использующем в явном виде вероятностные характеристики исследуемых классов состояний (дефектов) объекта. Основой этих
методов является принцип сравнительной оценки степени сходства распознаваемого изображения (вектора признаков реакций) с изображениями (признаками) из заданного (априорного) алфавита. Такая оценка осуществляется с помощью функций расстояния или метрики [17, 24].
Рассмотрим m классов технических состояний Sm, для которых в процессе обучения (априорно) получены изображения (признаки) h1 , h 2, …, h i , ,… h m .
Пусть в результате n проверок ( воздействий на ОД) пj ( j = 1, …, n) |
получено |
изображение распознаваемого объекта в виде вектора |
|
y = ( y1 , y 2, …, y j, …, yn ), j = 1, …, n, |
(2.13) |
где y j- признак соответствующей проверки пj .
Мерой сходства изображения y с признаком hi каждого класса состояний
является метрическое расстояние ρi = ρ(y, hi), которое определяется из
следующих выражений
49
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
|
n |
|
|
|
|
p |
1/p |
|
|
|
|
|
|
|
|
|
|||||
|
|
ri (y, h)p = y - h |
= å |
|
yj |
− hi |
|
. |
(2.14) |
||
|
|
|
j=1 |
|
|
|
|
|
|||
При |
p = 1 |
выражение ( 2.14) принимает метрику Хэмминга |
|
||||||||
|
|
|
n |
|
|
|
|
(2.15) |
|||
|
|
ρi (y, h)1 =å | yj − hi | , |
|
|
|||||||
|
|
|
j=1 |
|
|
|
|
|
|||
при |
p = 2 |
выражение ( 2.14) принимает метрику Евклида |
|
||||||||
|
|
|
n |
|
|
2 |
1/2 |
|
|
||
|
|
ri (y, h)2= |
å |
yj − hi |
|
. |
|
(2.16) |
|||
|
|
|
j=1 |
|
|
|
|
|
|||
при |
p = ¥ |
выражение ( 2.14) принимает метрику |
|
||||||||
|
|
ρi (y, h)∞ = max ( |
| yj − hi |
| , …, | yn |
− hi |). |
(2.17) |
|||||
Правило принятия решения, реализующее принцип минимума расстояния, заключается в вычислении расстояния ρi , отделяющего распознаваемое изображение (вектор) y от изображения (априорного вектора) каждого класса состояний Sm, в зачислении вектора y в класс состояний Si, оказавшийся ближе к нему, т.е.
y Î Si , если |
ρi < ρk , " i , k |
= 1, …, m; i ¹ k , |
(2.18) |
|
где ρk – наперед заданная метрика. |
|
|
||
Правило (2.18) можно представить и в другой эквивалентной форме: |
|
|||
y Î Si , |
если |
ρi = min {ρk } |
; i = 1, …, m . |
(2.19) |
|
|
k= 1,…, m |
|
|
Существуют и другие методы детерминированной оценки сходства распознаваемого изображения (апостериорного вектора) с описаниями классов и соответственно другие формы правил принятия решения [19]. Однако все они основываются на процедуре сличения полученного изображения (вектора признаков) y в результате проверки и априорного изображения hi классов состояний Si : определяется степень сходства каждого признака yj Î y с соответствующими признаками hi состояний диагностируемого объекта Si .
2.9.2. Статистические методы распознавания состояний технических систем
Основой всех методов этой группы является математический аппарат статистических решений. Отличие методов распознавания друг от друга сводится
50
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com