

Вешкурцев- Бычков АСКиД РЭС
.pdfгде λ – параметр нечеткой меры |
множества, введенный японским |
математиком Сугено (Sugeno) [ 6], |
он находится в пределах -1< λ < ¥; |
g(di)- нечеткий вес (степень важности) или нечеткая плотность
распределения весов дефектов При более строгом анализе нечеткого интеграла (2.51) можно видеть, что он
вычисляет не только l-меру нечеткого множества Dэ с указанием наиболее ожидаемого дефекта d0 в Dэ , но и также указывает нижнюю границу подобласти D'э Ì Dэ , в качестве которой является d0 , т.е. происходит сужение области Dэ . Взяв повторно нечеткий интеграл на области D'э , по степени концентрации состояний β (di) [19] уточняется вновь, как область D'э , так и тип дефекта d0* D'Э . Это описывается выражением [19]
*
' |
β λ (×), |
|
(2.53) |
d 0 = arg òf μ D э (d i ) o |
|
||
где D'э - область дефектов, уточненная в Dэ |
(2.51); |
μD's |
(di); - функция |
принадлежности, описывающая нечеткое множество D'э; |
βλ(×) |
- нечеткая l-мера |
|
множества Fj*={A1, .., Aj} , вычисляется аналогично (2.52), с помощью
дополнения |
ρ(А j ) |
степени связанности , β(dj) = 1 − ρ(A j ) [19 ]; Aj- нечеткое |
||||
множество |
элементарных |
состояний |
wi , |
характеризующих дефект |
||
(макросостояние) |
dj , Aj ={wi }. |
|
|
|||
Интеграл, взятый по степени концентрации состояний β(dj), характеризует в |
||||||
нечеткой области |
|
связанных |
дефектов D'э, наиболее возможный устойчивый |
|||
(несвязный) |
тип |
дефекта dj |
с учетом |
характера |
функции принадлежности |
|
множества D' э.
Алгоритм вычисления нечеткого интеграла. Алгоритм вычисления нечеткого интеграла состоит из двух частей: определения параметра l и вычисления собственно самого интеграла по априорной нечеткой плотности.
Параметр l , по определению [6, 19], принадлежит области (-1, ¥ ). Равенство l = 0 означает, что выполняется условие аддитивности априорных
весов
å g(A j ) = 1,
j
а это соответствует вероятностной мере распределения весов Aj. В случае, когда
арифметическая сумма нечетких плотностей весов
å g(A j ) Î (0, 1) |
либо > 1, λ ¹ 0. |
j |
|
61
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

Числовые значения параметра l находятся из решения уравнения [ 28 ]
1
λ
é m
ê∏ (1
ê i =1
ë
|
ù |
= 1, m = 2n , |
|
+ |
λ ×g(wi )) - 1ú |
(2.54) |
|
|
ú |
|
|
|
û |
|
|
где wi – элементарные состояния, характеризующие дефекты; wi Î Aj. Элементарное состояние wi есть кортеж ( е1 , е2, …, еn ), en Î{0,1}; g(wi) - называется нечеткой плотностью весов элементарных состояний, g(wi) Î [0,1] .
При решении |
уравнения (2.54) возникают более 2×m |
корней. Естественно |
||||
встает проблема выбора единственного корня для определения |
параметра |
l . |
||||
Данная задача решается в [28] для Aj Ç Am = Æ. Однако |
она требует большого |
|||||
объема |
вычислений и предполагает, что нечеткая плотность |
g(Aj) |
есть |
|||
индивидуальная оценка каждого эксперта. В данном случае |
будем полагать, |
что |
||||
вес g(Aj) |
является групповой (усредненной) оценкой экспертов. |
|
|
|||
Параметр |
λ |
вычисляется известным методом последовательного |
||||
приближения и |
выбирается из области l Î (-1, 0 ) при условии если |
|
||||
å g(Aj) > 1 или |
из |
области l Î (0 , ¥) , если å g(Aj) Î (0, 1). |
|
|
||
При дальнейшем изложении материала будем понимать, что |
g(Aj) =g(dj), |
|||||
Aj ºdj. |
|
|
|
|
|
|
Алгоритм вычисления нечеткого интеграла заключается в следующем.
1. Числовые значения (степени) апостериорной функция принадлежности mDs (dj) упорядочиваются таким образом, что
h1(d) > h2(d) >… hq(d) >...> hj(d),
где hq(d) – числовое значение или степень принадлежности дефекта d Î Dэ
функции принадлежности mDs(dj); h1(d), hj(d)– максимальное и минимальное значения этой функции соответственно.
2. Определяется нечеткая мера множеств: g λ(F1) = g(dh1), gλ(F2) = g(dh1,dh2),
g λ(F3) = g(dh1, dh2, dh3), ..., g λ(Fj) = g(dh1, dhq, ...,dhj) по (2.52) или по формулам
(4.7), (4.8) работы [19 ] . Здесь dhq – дефект, взятый соответствующим степени hq(×) функции принадлежности;
3. Берется минимум по упорядоченным степеням dj соответствующими мерами множеств Fj, т.е. min ( h1(d), g λ(F1) ),
min ( h2(d), g λ(F2) ), min ( h3(d), g λ (F3)),
. |
. . |
. |
. |
. |
. . |
. |
. |
min ( hj(d), gλ (Fj) );
62
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
4. Берется максимум max min ( hj(d), gλ (Fj) ) , |
|
|
|
j |
|
что и определяет наиболее ожидаемое макросостояние (дефект) d0 |
и его |
|
нечеткую меру |
gλmax (d0) = Smax . |
указывается |
Четвертым |
шагом приведенного алгоритма одновременно |
|
нижняя наиболее возможная граница подкласса D'э в Dэ. Следующим этапом
алгоритма является уточнение макросостояния сложной цифровой системы (СЦС) по степени связанности [19] нечетких множеств Aj элементарных
состояний ( характеризующих di ) в D'э . Уточнение выполняется аналогичным шагам 1 – 4 алгоритма вычислениями
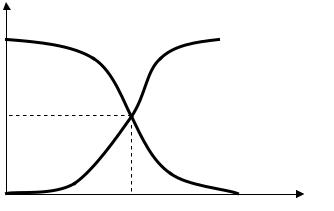
Решение нечеткого интеграла для дискретных состояний технической системы (ТС) иллюстрирует график (рис. 2.21) .
gλ (Fj)
1 


 gλ (Fj)
gλ (Fj)
Smax |
|
|
|
|
|
hj |
|
|
|
|
|
|
|
|
|
d0 |
d |
|
|
Рис. 2.21. Решение нечеткого интеграла |
|
||
Рассмотрим числовой пример. Пусть |
в результате |
технического |
|
диагностирования сложной электронной |
цифровой системы оператор |
||
определил область возможных дефектов D с функцией принадлежности
D = {0.5/b, 0.7/c , 0.3/s , 0.2/k , 0.1/v},
где b, c, s, k, v - виды дефектов (повреждений).
При этом имеется априорная нечеткая плотность весов, определенная группой
квалифицированных экспертов: |
|
|||
G = { 0,170/ b; 0,257/ c; 0,061/ s; |
0,212 / k; 0,216/ v}. |
|||
Числовые значения D и G взяты из [6, табл. 4.1 ]. |
||||
Определим параметр λ из выражения |
|
|||
1 = |
1 |
é∏(1 + λ × g(di )) -1ù. |
||
λ |
||||
|
ê |
ú |
||
|
|
ëi=D |
û |
|
63
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

Подставив в него априорные значения G и |
решив это уравнение методом |
последовательного приближения , получим λ = 0,25. |
|
Упорядочим область апостериорного |
множества D по убыванию функции |
принадлежности μD(di), вычислим значения нечеткого интеграла, согласно предложенному ранее алгоритму [7], а результаты занесем в табл. 2.3.
|
|
|
|
|
|
|
|
Таблица 2.3 |
||
|
|
|
|
|
|
|
|
|
|
|
|
i |
1 |
|
2 |
|
3 |
|
4 |
5 |
|
|
D |
0,7/c |
|
0,5/b |
|
0,3/s |
|
0,2/k |
0,1/v |
|
|
G |
0,257/c |
|
0,170/b |
|
0,061/s |
|
0,212/k |
0,216/v |
|
|
Fi |
0,257 |
|
0,437 |
|
0,505 |
|
0,744 |
1 |
|
|
S=min(D,Fi) |
0,257 |
|
0,437 |
|
0,3 |
|
0,2 |
0,1 |
|
|
max Si |
|
|
0,437 |
|
|
|
|
|
|
|
i |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Таким образом, значение |
нечеткого интеграла |
c мерой gλ (F2 )=0,437 |
||||||||
можно интерпретировать как "степень влияния" |
на работоспособность цифровой |
|||||||||
системы предполагаемой области |
дефектов |
D. Одновременно мерой gλ (F2) |
||||||||
определяется наиболее ожидаемый тип повреждения |
|
|
||||||||
arg max Si = b.
i
2.10. Основные методы поиска неисправностей
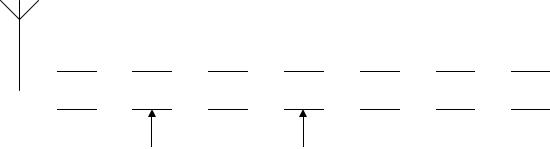
Рассмотрим в качестве объекта контроля и диагностики (ОКД) приемник радиостанции, структурные схемы которого приведены на рис.2.22 и 2.23 [29 ].
x1 |
|
z1 |
|
z2 |
|
z3 |
|
z4 |
|
z5 |
|
z6 |
|
z7 |
|
1 |
|
2 |
|
3 |
|
4 |
|
5 |
|
6 |
|
7 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
z8 |
|
|
|
z9 |
|
|
|
|
|
|
8 9
Рис.2.22. Структурная схема приемника
64
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
 УВЧ
УВЧ  СМ1
СМ1  УПЧ1
УПЧ1 СМ2
СМ2  УПЧ2
УПЧ2 ДЕТ
ДЕТ  УНЧ
УНЧ 
Гет1 |
|
Гет2 |
|
|
|
Рис.2.23. Функциональная схема приемника
Общее число возможных состояний объекта контроля при его разделении на N
функциональных элементов составляет
S = 2N - 1,
при этом условно обозначают состояние элемента в норме "1", а отклонение от нормы – "0".
Однако проконтролировать такое количество состояний ОКД и даже смоделировать их является достаточно сложной задачей. К тому же на практике большинство состояний ОКД маловероятно. Поэтому на практике и при
моделировании чаще всего рассматриваются однократные константные неисправности (дефекты). В связи с этим число состояний для рассмотрения резко уменьшается до S1N = N .
Для организации контроля и диагностики априорно определяется таблица неисправностей объекта, например, для рассматриваемого приемника она имеет вид табл.2.4.
Таблица 2.4
Si |
|
|
|
|
z i |
|
|
|
|
|
z1 |
z2 |
z3 |
z4 |
|
z5 |
z6 |
z7 |
z8 |
z9 |
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
S0 |
1 |
1 |
1 |
1 |
|
1 |
1 |
1 |
1 |
1 |
S1 |
0 |
0 |
0 |
0 |
|
0 |
0 |
0 |
1 |
1 |
S2 |
1 |
0 |
0 |
0 |
|
0 |
0 |
0 |
1 |
1 |
S3 |
1 |
1 |
0 |
0 |
|
0 |
0 |
0 |
1 |
1 |
S4 |
1 |
1 |
1 |
0 |
|
0 |
0 |
0 |
1 |
1 |
S5 |
1 |
1 |
1 |
1 |
|
0 |
0 |
0 |
1 |
1 |
S6 |
1 |
1 |
1 |
1 |
|
1 |
0 |
0 |
1 |
1 |
S7 |
1 |
1 |
1 |
1 |
|
1 |
1 |
0 |
1 |
1 |
S8 |
1 |
0 |
0 |
0 |
|
0 |
0 |
0 |
0 |
1 |
S9 |
1 |
1 |
1 |
0 |
|
0 |
0 |
0 |
1 |
0 |
|
|
|
|
|
|
|
|
|
|
|
65
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Для реализации оптимального алгоритма поиска неисправностей системой контроля и диагностики, как правило, решаются две задачи.
1.Выбор наиболее информативных параметров контроля с допустимыми материальными затратами.
2.Поиск наилучшей последовательности контроля выбранных параметров, т.е. применение оптимального алгоритма поиска неисправности.
Существуют следующие основные алгоритмы поиска неисправностей: 1) последовательного функционального анализа; 2) половинного разбиения; 3) поиска по способу время – вероятность;
4) поиска неисправностей с использованием информационного критерия; 5) поиска неисправностей на основе метода ветвей и границ; 6) поиска неисправностей на основе принципа иерархии.
Рассмотрим подробнее некоторые из них.
2.10.1. Последовательные функциональные алгоритмы
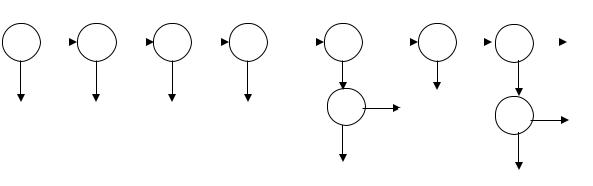
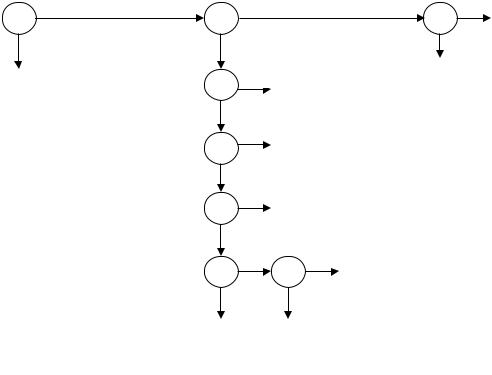
Одним из исторически первых способов построения алгоритма поиска повреждения в РЭС был способ последовательного функционального анализа, сущность которого заключалась в следующем. Исходя из назначения РЭС определяются основные функции её элементов, исправность которых позволяет считать, что контролируемая РЭС способна выполнить поставленные перед ней задачи. Для схем (рис.2.22 и 2.23) такой алгоритм поиска неисправностей показан на рис.2.24.
0 |
0 |
0 |
0 |
0 |
0 |
|
0 |
S9 |
Z7 |
Z6 |
Z5 |
Z4 |
Z3 |
Z2 |
Z1 |
|
|
|
|
|||||||
1 |
1 |
1 |
1 |
1 |
1 |
|
|
1 |
|
|
|
|
0 |
S6 |
|
|
0 |
S0 |
S1 |
S2 |
S3 |
Z9 |
Z8 |
|
|
|
1 |
S5 |
|
S8 |
|||||
|
|
|
|
|
|
1 |
||
|
|
|
|
|
S7 |
|
||
|
|
|
|
S4 |
|
|
|
Рис. 2.24. Последовательный функциональный алгоритм поиска
неисправностей
66
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
Таблица решений |
Состояния |
|
Решения |
|
|
|
S0 |
Приемник исправен |
|
S1 |
Неисправен |
УНЧ |
S2 |
Неисправен |
Детектор |
S3 |
Неисправен |
УПЧ 2 |
S4 |
Неисправен |
СМ 2 |
S5 |
Неисправен |
Гет 2 |
S6 |
Неисправен |
УПЧ 1 |
S7 |
Неисправен |
СМ 1 |
S8 |
Неисправен |
Гет 1 |
S9 |
Неисправен |
УВЧ |
|
|
|
Представленный способ построения алгоритма контроля состояний и поиска неисправностей отличается простотой логического анализа объекта контроля и диагностики, наглядностью полученных результатов. Данный алгоритм требует минимума априорной информации об объекте. При этом данный алгоритм имеет недостатки, основным из которых является то, что он не оптимален ни по времени, ни по средним затратам.
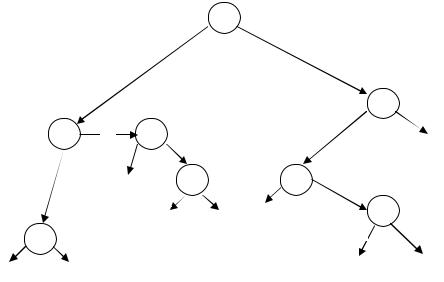
2.10.2. Алгоритм половинного разбиения
Идея этого алгоритма заключается в следующем. Объект контроля и диагностики разделен на N последовательно соединенных функциональных элементов (блоков). Известно, что ОКД неработоспособен из-за одного i-го (i=1,…, N) элемента. Вероятности состояний Si ОКД одинаковы и равны p(Si)= 1/N. Стоимости контроля выходных параметров zi одинаковы. Тогда первым контролируется параметр, несущий максимум информации о состоянии ОКД. Поскольку неопределенность состояния ОКД до проверки параметров оценивается энтропией [29]
N
H0 = å p(si) log2 p(si) = log2 N ,
i=1
то первым необходимо контролировать такой параметр zk , чтобы энтропия H(zk)=H0/2 при положительном или отрицательном результате контроля, т.е. выбирается такой параметр zk, который разбивает ОКД пополам.
Каждый последующий параметр для контроля выбирается таким же образом, т.е. делит пополам образующуюся систему после выполнения предыдущей проверки в зависимости от результатов исхода.
Рассмотрим алгоритм поиска неисправности ОКД (рис.2.22 и 2.23), приведенный на рис.2.25.
67
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
|
|
Z3 |
|
|
|
|
|
|
|
1 |
|
|
0 |
|
|
|
|
|
|
|
|
|
Z1 |
0 |
|
|
|
|
|
|
|
|
|
Z5 |
0 |
|
Z4 |
0 |
|
1 |
|
S1 |
|
1 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
1 |
|
S5 |
0 |
Z9 1 |
1 Z2 |
0 |
|
|
|
|
|
|
S3 |
|
Z2 |
|
|
|
|
|
S4 |
S9 |
|
0 |
||
1 Z6 |
|
|
1 |
|
||||
0 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
S7 |
S6 |
|
|
|
|
S2 |
|
S8 |
Рис.2.25. Алгоритм половинного
В данном примере ОКД содержит нечетное число функциональных элементов, поэтому первым контролируется параметр z3 , т. к. он делит ОКД на две части, наиболее близкие к половинам (4 и 5 элементов в каждой). Следующие параметры контроля выбираются аналогично.
Способ половинного разбиения применим также в том случае, когда в ОКД имеются кратные неисправности (повреждены одновременно несколько элементов), поиск которых осуществляется последовательно, после устранения уже найденных неисправностей.
2.10.3. Алгоритм поиска неисправностей по способу время - вероятность
Априорная (исходная) информация для применения данного способа представляется функциональной и структурной моделями ОКД, таблицей неисправностей, вероятностями распределения p(Si) различных состояний ОКД и временем ti контроля параметров Zi функциональных элементов.
После выполнения операции контроля работоспособности и принятия решения о неисправности ОКД начинается поиск дефектных элементов путем их последовательной проверки. По таблице неисправностей выбирают набор параметров Zi до заданной глубины поиска. Последовательность контроля
выходных параметров функциональных элементов устанавливают в порядке уменьшения отношения
p(Si ) |
> |
p(Sk ) |
> K > |
p(SN ) |
. |
ti |
tk |
|
|||
|
|
tN |
|||
68
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Алгоритм, построенный по этому способу, обладает минимальным средним временем поиска дефекта.
Рассмотрим реализацию этого алгоритма на примере ОКД (рис.2.22 и 2.23), для которого определены следующие вероятности состояний: p(S1) = 0,09; p(S2)= = 0,06; p(S3)= 0,05; p(S4)= 0,08; p(S5)= 0,1; p(S6)= 0,15; p(S7) = 0,2; p(S8) = 0,1;
p(S9)= 0,17. |
Значения времени ti равны: t1 = t6= 2 мин; t2 = t4 = t8 = |
t9 = 1,5 мин; |
t3 = t5 = t7 |
= 1 мин. Вычислив отношения p(Si)¤ti, получим |
следующую |
последовательность контроля параметров: Z9 → Z5 → Z6 → Z8 → Z4 → Z3 →Z1 → Z2 (рис.2.26) . Среднее время поиска отказавшего элемента
tср = p(S9)t9 + p(S5)(t9 + t5 ) + p(S6)(t9 + t5 + t6 ) + + p(S8)(t9 + t5 + t8 ) + p(S4)( t9 + t5 + t8 + t4) +
+ p(S3)( t9 + t5 + t8 + t4 + t3 ) +p(S1)(t9 + t5 + t8 + t4 + t3+ t1) + + p(S2)(t9 + t5 + t8 + t4 + t3+ t1+ t2) = 5,16 мин.
Для тех же значений среднее время поиска поврежденного элемента по алгоритму половинного разбиения tср≈5,58 мин, по алгоритму последовательного функционального анализа tср ≈ 7,03 мин.
|
1 |
1 |
|
0 |
Z9 |
Z5 |
|
|
Z6 |
0 |
0 |
|
1 |
S6 |
S9 |
Z8 |
0 |
|
S7 |
|
S8 |
|
|
|
|
1 |
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
Z4 |
S5 |
|
|
|
0 |
1 |
|
|
|
|
|
|
|
|
Z3 |
S4 |
|
|
|
0 |
1 |
1 |
|
|
|
|
||
|
|
|
|
|
|
Z1 |
Z2 |
S3 |
|
|
0 |
0 |
|
|
S1 S2
Рис.2.26. Алгоритм поиска дефекта по способу время - вероятность
Таким образом, качество процесса поиска неисправностей по алгоритму время - вероятность оценивается средним временем поиска неисправности.
69
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

3.ВЫБОР ДИАГНОСТИЧЕСКИХ ПРИЗНАКОВ
Вкачестве контрольно-диагностических признаков в основном используются значения измеряемых параметров (сигналов) объекта контроля или интервалы, в которых располагаются эти значения. Сказанное означает, что каждому
параметру соответствует свой признак и что это соответствие взаимно однозначно. Поэтому задача выбора контрольно-диагностических признаков совпадает с задачей выбора измеряемых параметров. В классической постановке такая задача заключается в определении параметров (контрольных точек), обеспечивающих полную наблюдаемость ОКД. Полная наблюдаемость объекта
означает возможность определения любого его состояния в любой момент времени по данным произведенных измерений.
Выбор контрольно-диагностических признаков предусматривает наличие исходного множества доступных для измерения параметров объекта (исходного словаря признаков), которые достаточно полно бы описывали отличительные свойства заданных технических состояний. При разработке словаря признаков сталкиваются со следующими ограничениями: 1) в словарь включают только признаки, относительно которых может быть получена априорная информация, достаточная для описания классов состояний на языке эти признаков (априорный
словарь); 2) в априорный словарь не включать малоинформативные признаки; 3) некоторые из наиболее информативных признаков не могут быть определены из-за отсутствия соответствующих измерителей в связи с ограничением в ресурсах. Поэтому априорный словарь признаков может быть использован лишь в качестве основы для построения реального словаря – рабочего словаря признаков
[ 8, 17, 25, 27].
3.1.Метрический метод построения рабочего словаря признаков
вусловиях ограничения затрат
В результате классификации все множество состояний ОКД
разбито на ряд непересекающихся подмножеств, Α1 , Α2 ,..., Αm , которых составляет соответствующий класс:
Α1 = {ω 11 , ω 12 ,..., ω 1 k1 },
Α2 = {ω 21 , ω 22 ,..., ω 2 k 2 },
L L L L L L L L L
Α p = {ω p 1 , ω p 2 ,..., ω pk p },
L L L L L L L L L
Α m = {ω m 1 , ω m 2 ,..., ω mk m }.
Α = {ω}
каждое из
(3.1)
70
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com