

Вешкурцев- Бычков АСКиД РЭС
.pdf
|
|
|
Системы диагностики |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Аппаратные |
|
|
|
Программно- |
|
Программные |
||||
|
|
|
|
|
|
аппаратные |
|
|
||
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
Внешние |
|
|
|
Встроенные |
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
Специализированные |
|
Универсальные |
|
|
|
|||||
Рис. 2.5. Классификация систем диагностики по видам |
||||||||||
|
|
|
|
|
реализации |
|
|
|||
|
2.4. Обобщенная структура системы диагностики |
|||||||||
Рассмотрим обобщенную структурную схему системы технической
диагностики [ 1 |
] ( рис. 2.6). |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Д |
|
КС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
X(t) |
|
ОД |
|
|
|
|
|
Ком1 |
|
|
П |
|
Ком 2 |
|
|
ИУ |
|
|
ИR |
|
|
ЛПР |
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
Д |
|
|
КС |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АпИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
КС |
|
|
|
ГСВ |
|
УУ |
УС |
|
|
|
РУ |
|
ЛПР |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
АИ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ПД |
|
|
|
ПрУ |
|
|
ЛПР |
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис.2.6. Обобщенная структурная схема системы диагностики: Д – датчик; КС – канал связи; Ком– коммутатор; П – преобразователь; ИУ – измерительное устройство; ИR– индикатор реакций; AпИ – блок апостериорной информации; АИ – блок априорной информации; УУ – управляющее устройство; УС – устройство сравнения; ГСВ – генератор стимулирующих воздействий; ПД– блок поля допусков; ПрУ – прогнозирующее устройство;
РУ– решающее устройство; ЛПР – лицо, принимающее решение; |
- работа в режиме |
|
функционального диагностирования; |
- режим обучения |
|
Эта схема раскрывает состав аппаратуры и соединения между блоками аппаратуры, показанные ранее (рис.2.3 и 2.4). Вполне понятно, что отдельные
21
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
блоки в реальной системе диагностики могут отсутствовать, например канал связи, когда СТД и ОД находятся рядом.
2.5. Показатели системы технической диагностики
Система технической диагностики характеризуется следующими основными показателями.
1. Глубина поиска дефекта
КГП = |
B |
, КГП [0,1], |
|
N |
|||
|
|
где B– число однозначно различных составных частей изделия на принятом уровне деления с точностью, до которой определяется место дефекта; N – общее число составных частей изделия на принятом уровне деления с точностью, до которой требуется определить место дефекта;
2. Коэффициент полноты контроля работоспособности [ 9]
|
γ |
|
|
= |
λК |
, |
|
|
|
|
пк |
|
|
|
|||||
|
|
|
λ0 |
|
|
||||
или [ 10 ] |
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
Pоб æ |
|
|
lgPK - lgDПРК ö |
|||||
γпк = |
|
|
ç1 + |
|
|
|
÷, |
||
|
|
|
|
lgPсис |
|||||
|
Kи è |
|
|
|
|
ø |
|||
где λк – суммарный поток отказов составных частей изделий охваченных контролем и диагностикой ;λ0 – суммарный поток отказов всех частей изделий; Роб– вероятность обнаружения дефекта системы; Рсис – вероятность безотказной работы изделия; РК – вероятность безотказной работы системы контроля;
DПРК – достоверность принятия решения о состоянии изделия системой контроля; Ки – коэффициент избыточности объекта диагностирования;
3.L – длительность теста диагностирования.
4.Т – время диагностирования .
5.б – средняя трудоемкость диагностирования .
6.С – средняя оперативная стоимость диагностирования.
7.Dd – достоверность диагностирования.
8.КУ – коэффициент унификации устройств сопряжения со средствами диагностирования.
2.6. Параметры системы технического контроля и диагностики
Параметр диагностирования или диагностический параметр (ДП) – это параметр (или признак) ОД, используемый в установленном порядке для определения технического состояния объекта. Для каждого изделия радиоэлектроники можно указать множество параметров (или признаков),
22
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
характеризующих его техническое состояние. Большинство ДП по своему назначению могут иметь двойственную природу, являясь одновременно диагностическими и техническими параметрами (или параметрами функционального использования).
В общем случае диагностические параметры можно представить тремя пересекающимися классами:
- параметры для определения работоспособности ОД Пр(Пр1 , …, Прn);
-параметрами поиска места дефекта Ппд(Ппд1 , …, Ппдi);
-параметрами прогнозирования технического состояния Ппр(Ппр1 , …, Ппрj).
Решение о техническом состоянии сложной РЭС принимается на основе
анализа совокупности ДП. Принятие трудной научно-технической задачей, наиболее информативных ДП, выбор текущих значений ДП.
такого решения является достаточно включающей операции: выбор области допусков на каждый ДП, измерение
2.7. Классификация методов технической диагностики
Методы технической диагностики определяются типом объектов контроля и диагностирования (ОКД). Известная [ 11] классификация методов приведена на рис 2.7.
|
|
|
|
|
|
|
|
|
ОКД |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
С измеряемыми |
|
||||
|
|
С измеряемыми |
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
основными и |
|
|||||||
|
|
определяющими |
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
вспомогательными |
|
||||||||
|
|
|
параметрами |
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
параметрами |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
Метод иденти- |
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
Комбини- |
|
Метод под- |
|
Метод |
|||||||||
Метод |
|
фикации и |
|
|
|
|||||||||||||
|
|
рованный |
|
лежащих |
|
групповых |
||||||||||||
тестов |
|
теории чувстви- |
|
|
|
|||||||||||||
|
|
|
|
тельности |
|
|
метод |
|
проверок |
|
проверок |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ОКД цифровые |
|
|
|
|
|
ОКД аналоговые |
||||||||||
Рис.2.7. Классификация методов диагностики в зависимости
от измеряемости параметров и класса ОКД
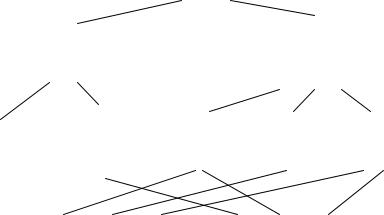
Тестовые СТД в зависимости от методов тестирования цифровых ОКД подразделяются на варианты [12] ( рис. 2.8).
23
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
|
|
|
|
|
|
|
Методы |
|
|
|
|
|
|
|
|
Генерация воздействий |
тестирования |
|
|
|
Анализ реакций |
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Детерминир. |
|
|
|
|
Детерминир. |
Информацион- |
|
|||||||
|
генерация |
|
|
|
|
|
тестирование |
|
|
|
ный эталон |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Исчерпывающая |
|
|
|
|
Исчерпывающее |
|
|
|
Физический |
Полный |
||||
|
генерация |
|
|
|
|
|
тестирование |
|
|
|
эталон |
|
|
||
|
|
|
|
|
|
|
|
|
|
|
эталон |
||||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Вероятностная |
|
|
|
|
Вероятностное |
|
|
|
|
Датчики |
|
|
|
|
|
генерация |
|
|
|
|
|
тестирование |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Функции счета |
|
|
|
|
|
|
|
|
|
|
Компактное |
|
|
|
|
|
|||
|
|
|
|
|
|
|
детерминир. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тестирование |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Контрольные |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
Компактное |
|
|
|
|
единицы |
|
|
Сжатый |
|
|
|
|
|
|
исчерпывающе |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
Синдром |
|
|
эталон |
||
|
|
|
|
|
|
|
тестирование |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Спектральные |
|
||
|
|
|
|
|
|
|
Компактное |
|
|
|
|
коэффициенты |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
вероятностное |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
тестирование |
|
|
|
|
Сигнатура |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 2.8 . Методы тестирования
2.8. Математическая модель системы диагностики
Функционирование системы технической диагностики основано на алгоритмах, базой которых являются математические модели объектов диагностики, стимулирующих воздействий, реакций и правил принятия решений [ 13]. Построение математической модели системы диагностики разбивается на три этапа.
На первом этапе определяется класс, в котором будет строиться модель.
Математические модели систем диагностики можно разделить на следующие классы: линейные и нелинейные, стационарные и нестационарные, детерминированные и стохастические (вероятностные), непрерывные и дискретные и др.
На втором этапе производится выбор структуры модели. Так, если система
диагностики описывается системой обыкновенных дифференциальных уравнений, то должен быть определен порядок этой системы уравнений. Если система является стохастической, то должен быть оговорен характер случайных процессов, протекающих в системе. Например, может быть выдвинута гипотеза о стационарности случайных процессов.
24
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
Третий этап состоит в определении неизвестных параметров математической
модели. |
|
Решение задач на каждом |
этапе построения модели называется |
идентификацией в широком смысле. Приступая к построению модели диагностирования, часто имеется априорная информация о классе модели и ее структуре. В этом случае задачи первого и второго этапов можно считать априорно решенными.
Тогда задача третьего этапа является задачей идентификации в узком смысле.,
под которой понимается определение неизвестных параметров математической модели. Эта задача называется параметрической идентификацией.
Прикладной характер задачи параметрической идентификации связан с решением таких примеров, как
-определение динамических характеристик, необходимых для построения адаптивных и самонастраивающихся систем;
-определение информационно-диагностических признаков при контроле функционирования и диагностике технических систем.
2.8.1. Математическая формализация задачи технической диагностики
Диагностика технических |
систем состоит |
из двух частей. Сначала |
выполняется параметрическая |
идентификация, в результате которой находятся |
|
оценки информационно-диагностических признаков. Затем проводится
классификация, в результате которой |
определяется техническое |
состояние |
||||
диагностируемой |
системы |
(объекта |
диагностики). |
В |
этом |
случае |
диагностирование будет осуществляться в соответствии со следующей схемой
(рис.2.9).
x(t) |
ОД |
y(t) |
|
|
Иденти-
фикатор
H(t)
Класси-
фикатор
Система техни- ческой диагно- стики.
Рис.2.9. Модель диагностирования
Как видно из математической модели (рис. 2.9), идентификатор и классификатор образуют систему технической диагностики.
На этапе параметрической идентификации для каждого класса состояний исследуемой системы находятся и накапливаются в памяти системы технической
25
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

диагностики эталонные информационно-диагностические признаки. Состояние ОД будет характеризовать вектор информационно-диагностических признаков
|
|
æ h1 |
ö |
|
r |
= |
çh2 |
÷ |
, |
H |
ç : |
÷ |
||
|
|
ç |
÷ |
|
|
|
è hl |
ø |
|
где i – размерность вектора.
Рассмотрим задачу диагностики как задачу распознавания образов. Под образом будем понимать совокупность информационно-диагностических признаков, принадлежащих ОД, находящихся в одном из возможных классов состояний. Тогда в памяти системы технической диагностики будет храниться множество информационно-диагностических признаков.
Пусть для некоторого состояния |
ОД имеется М эталонных образов. И пусть |
||||||||||
N – общее |
количество |
классов |
состояний, |
тогда |
множество |
||||||
{Hi j }, i = |
|
|
j = |
|
|
образует совокупность образов, |
характеризующих все |
||||
1, M; |
1,N |
||||||||||
возможные классы состояния ОД. |
Решение о состоянии ОД производится по |
||||||||||
правилу (процедуре), |
основанному на |
сравнении |
эталонных образов |
||||||||
(совокупности признаков) состояний с апостериорными признаками, полученными в процессе контроля параметров ОД.
Существуют три основных подхода к построению решающего правила принятия решения о состоянии ОД, основанных на алгоритмах.
1.Детерминированный.
2.Вероятностный.
3.Fuzzy (нечеткий) – алгоритм.
Все эти подходы предполагают нахождение меры близости ρ между векторами информационно-диагностических признаков Hап исследуемого ОД и множества эталонных образов {Hi j }:
ρ j = ϕ(Hi j - Hап ), i = 1,M, j = 1, N .
Здесь j(×) означает процедуру сравнения. |
|
|
|
|
|
||
В этом случае решающее правило имеет вид |
|
|
|
|
|
||
|
Hап Î Sk если ρk |
< ρ j , |
j = |
|
|
j , |
|
|
1, N, k ¹ |
|
|||||
где Sk |
– состояние ОД. Приведенное правило означает, |
что |
апостериорный |
||||
вектор |
Hап характеризует состояние |
Sk объекта диагностики |
из множества |
||||
возможных состояний S , если мера близости |
rk меньше всех других мер rj . |
||||||
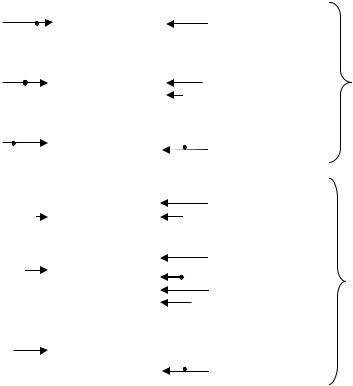
2.8.2. Сигналы и их математические модели
Информация о техническом состоянии ОД может быть получена на основе анализа информационно-диагностического сигнала, подлежащего измерению.
Таким сигналом может быть y(t) выходной сигнал, являющийся реакцией на
26
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
некоторые воздействия (функциональные, тестовые). Тогда для различных технических состояний Sj объекта диагностирования (ОД) при одном и том же
воздействии возможны различные реакции Z j R , характерные для каждого состояния Sj ОД. Таким образом, если ОД находится в одном из N технических состояний Sj , то для него соответствует определенный класс информационнодиагностических сигналов (реакций) за определенный промежуток времени. В связи с этим возникает необходимость (задача) описать полученные сигналы в единой системе признаков (образов).
Рассмотрим следующую схему (рис.2.10).
|
|
|
υ(t) |
|||
x(t) |
|
y(t) |
|
|
z(t) |
|
ОД |
||||||
|
||||||
|
|
|
|
|
||
|
|
|
|
|
|
|
Рис.2.10
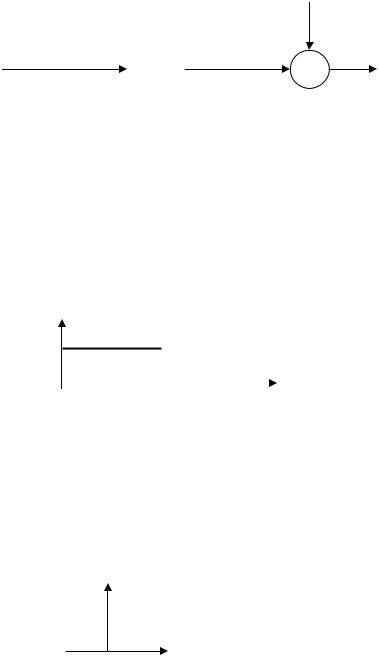
В этой схеме υ(t) – шум; z(t) – измеряемый сигнал; x(t) – входное воздействие. Входное воздействия может быть представлено моделью:
1) единичной ступенчатой функцией ( функция Хевисайда)
x(t) = {1(t), t> 0 , 0, t< 0 ;
x(t)
0 |
t |
2) единичной импульсной функцией ( дельта–функция)
|
x(t) = |
{δ (t), t = 0 , |
|
|
0, t ¹ 0 ; |
∞ |
δ(t) |
|
|
|
0 t
27
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

3) линейно возрастающей функцией x(t) = α(t), t > 0;
x(t)
0 |
t |
4) гармонической функцией |
x(t) = A cos(ω t + ϕ) или иной де- |
терминированной моделью; 5) случайным сигналом с известными статистическими характеристиками:
- математическим ожиданием |
m1{x(t)} = m1 (t) = ò−∞∞ x × p(x, t)dx , |
|
- вторым начальным моментом |
m2 {(x(t))2 } = ò−∞∞ x2 × p(x, t)dx , |
|
- дисперсией |
M2{x(t)} = ò−∞∞ [x − m1 (t)]2 p(x, t)dx , |
|
- корреляционной функцией (характеристика взаимосвязи) |
||
|
B(t1 , t2 ) = ò−∞∞ ò−∞∞ x1 × x2 × p(x1 , x2 ; t1 , t2 )dx1dx2 , |
|
где p(x; t) - одномерная плотность вероятности; p(x1, x2 ;t1,t2 ) – двумерная
плотность вероятности.
В том случае, когда ОД является многомерным (т.е. многовходовым), входной сигнал будет представлять собой вектор, переменный во времени, или переменное во времени случайное поле ( пространственно-временное поле)
æ x1
ç
r ç x2
X(t) = ç ç: çè xk
где k – размерность сигнала.
(t) ö
÷
(t)÷
÷ = {x1 (t), x2 (t),..., xk (t)} ,
÷
(t)÷ø
Таким образом, на вход ОД поступает стимулирующее воздействие X(t) определенного вида. Тогда на выходе ОД реакция на это воздействие может быть представлена в виде вектора выходного сигнала Y(t) , причем данный сигнал
28
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com

несет информацию о входном сигнале X(t) и техническом состоянии Sj диагностируемого объекта:
r |
|
æ y1 (t) |
||
|
ç y2 |
(t) |
||
Y(t) |
= |
|||
ç: |
|
|||
|
|
ç |
|
|
|
|
è ym (t) |
||
где m – размерность сигнала. |
|
|||
При одном и |
том |
же |
||
ö
÷÷ = {y1 (t), y2 (t),..., ym (t)} ,
÷
ø
стимулирующем тактовом воздействии
(функциональном или специально генерируемом) X(t) для различных технических состояний {S j}, j = 0, N - 1 будут различные реакции Y(t) на выходе ОД. Следовательно, выходной сигнал Y(t) является информационно-
диагностическим сигналом. Определив этот сигнал и проведя соответствующую
обработку, можно получить информационно-диагностические |
признаки {Hi }, |
отображающие как технические состояния системы, |
так и входные |
воздействия.
Например, в качестве обработки такого выходного сигнала можно использовать прямое преобразование Фурье [14]:
Sy (ω) = ò−∞∞ y(t) × e- jωtdt ,
что можно представить в виде |
Sy (ω) |
= A(ω) - jB(ω) = S(ω) e jϕ (ω ) , |
|||||||
где |
A(ω) = ò∞ y(t) cos ω t dt , |
B(ω) = ò∞ |
y(t) sin ω t dt . |
||||||
|
|
−∞ |
|
|
|
−∞ |
|
|
|
Модуль и аргумент спектральной плотности определяются выражениями: |
|||||||||
S(ω) |
= |
A(ω)2 + B(ω)2 |
– |
амплитудно-частотная |
характеристика (АЧХ) |
||||
устройства ; |
|
|
|
|
|
|
|||
ϕ(ω) |
= −arctg |
B(ω) |
– фазочастотная характеристика (ФЧХ) |
устройства. |
|||||
A(ω) |
|||||||||
АЧХ |
и |
ФЧХ |
могут быть потенциальными диагностическими признаками |
||||||
(параметрами) объекта диагностики. |
|
Y(t) |
|
||||||
Повторим, что |
выходной |
сигнал (или реакция ) |
с ОД заключает |
||||||
двойственную информацию: |
информацию о внутреннем состоянии объекта и |
||||||||
входном сигнале (воздействии) X(t). Следовательно, реакцию Y(t) можно
представить в виде мультипликативного выражения
Y(t) = А (β) × X(t,χ),
где А (×) – оператор объекта диагностики; β , χ - внутренние и внешние параметры объекта диагностики. Оператор А(×) несет информацию о структуре
ОД и правилах взаимодействия с входным воздействием X(t,χ). Следовательно, А (β) - есть оператор функционирования ОД и является его моделью, которая
29
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com
может быть описана передаточной функцией в операторной форме [14 ].
В общем виде передаточная функция в операторной форме устройства определяется выражением
bm pm + bm-1 pm-1 + … + b1 p1 + b0
K(p) = |
|
|
, |
|
|
||
|
an pn+ an-1 pn-1 + … + a1 p1 + a0 |
||
где p = ( s +j w ) – комплексная частота; bm |
, an - коэффициенты. |
||
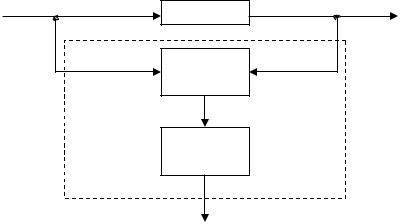
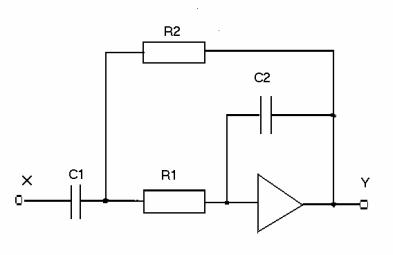
Рассмотрим пример. Пусть объект диагностики представляет собой блок задержки сигнала, выполненный по схеме (рис. 2.11).
Рис. 2.11. Схема задержки: Y |
= K(p) X |
|||
Передаточная функция для этой схемы имеет вид |
||||
K(p) = |
-T1 × p |
|
, |
|
T1 T2 p2 + (k T1 +T2 ) p + 1 |
||||
|
|
|||
где T1 = R2 C1 ; T2 = R1 C2 ; k = C2 /C1 .
Изменив параметры (резисторов, конденсаторов или их вместе) передаточной функции ( оператора или модели) этой схемы и подав соответствующий входной сигнал (стимулирующее воздействие), получим выходные сигналы (реакции), однозначно определяющие эти состояния. Таким образом будет формироваться
априорный словарь повреждений и признаков для целей диагностики состояний схемы задержки.
В качестве операторов функционирования А (β) электронных схем могут использоваться и другие математические модели, например, частотный коэффициент передачи К( jw) [ 14 ], тогда зависимость Y(t) имеет вид
Y(t) = K( jw ) X(t),
30
PDF создан испытательной версией pdfFactory Pro www.pdffactory.com