

1.4.6. Индукционные расходомеры
Индукционные расходомеры предназначены для измерения в напорных трубопроводах среднего объемного расхода горячей и холодной воды. Они могут работать в составе теплосчетчиков, а также в системах контроля и регулирования других электропроводящих жидкостей технологических процессов в промышленности.
Принцип работы индукционного расходомера основан на измерении электродвижущей силы (ЭДС) индукции, возникающей в объеме электропроводящей жидкости, движущейся в магнитном поле, создаваемом электромагнитной системой в сечении канала первичного преобразователя. Для примера рассмотрим структуру расходомера-счетчика электромагнитного «ВЗЛЕТ ТЭР» (рис. 1.16) [7].
Расходомеры–счетчики электромагнитные «ВЗЛЕТ ТЭР» г. Санкт-Петербург выпускаются на диаметры условного прохода трубопроводов Dу от 10 до 300 мм и наибольший измеряемый средний объемный расхода жидкости Qнаиб от 2,83 до 2547 м3/ч;
Рис. 1.16. Структура индукционного расходомера
Электромагнитный первичный преобразователь (ППР) расходомера (рис. 1.16) представляет собой полый магнитопроницаемый цилиндр, снаружи которого расположены обмотки электромагнита. Внутренняя поверхность цилиндра имеет электроизоляционное покрытие. Для съема измерительного сигнала в стенках цилиндра в горизонтальной плоскости диаметрально расположены два электрода, контактирующие с контролируемой жидкостью.
ЭДС индукции Е пропорциональна средней скорости потока жидкости V, расстоянию между электродами d (внутреннему диаметру первичного преобразователя) и магнитной индукции В:
![]() (1.11)
(1.11)
где
![]() – коэффициент пропорциональности.
– коэффициент пропорциональности.
Для данного типоразмера электромагнитного расходомера величины В и d постоянные. Значение ЭДС не зависит от температуры, вязкости, а также проводимости жидкости при условии, что проводимость не меньше указанной в технических характеристиках расходомера. С учетом (1.11) для ЭДС индукции расход Q определяется по формуле:
![]()
![]() (1.12)
(1.12)
О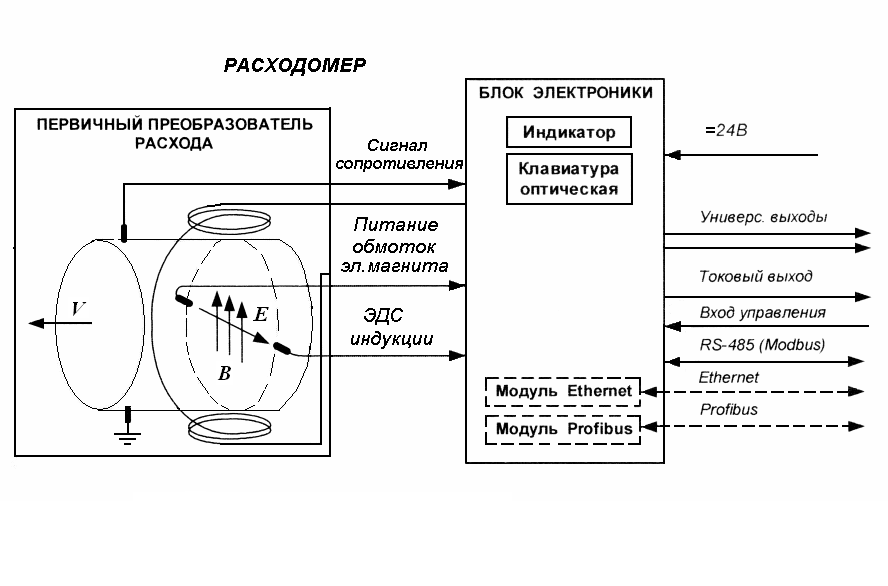 бъем
жидкостиV
, прошедший через ППР за интервал времени
T
, рассчитывается по формуле
бъем
жидкостиV
, прошедший через ППР за интервал времени
T
, рассчитывается по формуле
![]() (1.13)
(1.13)
Для определения сопротивления контролируемой жидкости в стенках цилиндра в вертикальной плоскости диаметрально расположены два электрода.
Преобразователи расхода индукционные микропроцессорные ПРИМ г. Пермь [8] (рис. 1.17) предназначены для преобразования расхода жидкости в импульсный электрический сигнал. Область применения преобразователей: учет расхода и количества потребляемой питьевой и технической воды в составе расходомеров и теплосчетчиков, а также других электропроводящих жидкостей в системах контроля и регулирования технологических процессов в промышленности.
Р ис.
1.17. Индукционный микропроцесс-
ис.
1.17. Индукционный микропроцесс-
сорный расходомер ПРИМ
П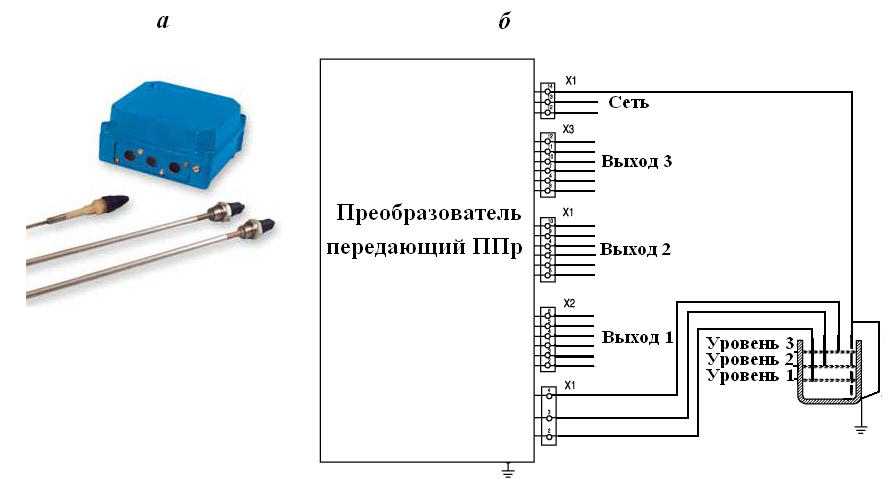 реобразователи
выпускаются в двух исполнениях, имеющих
различные метро-гические характеристики,
и обозначаемых буквенными индексами
«О» (обычное исполнение) и «П» (прецизионное
исполнение). По классификации средств
измерений объема и массы жидкости,
приведенной в ГОСТ 8.510-2002, преобразователи
с индексом «О» относятся к рабочим
средствам измерений, а – с индексом
«П» – к рабочим эталонам 2-го разряда.
Диапазон номинального (условного
прохода) размера трубопроводаDN
от 10 до 150 мм, а преобразования расхода
Q
от 0.03 до 400
м3/ч.
реобразователи
выпускаются в двух исполнениях, имеющих
различные метро-гические характеристики,
и обозначаемых буквенными индексами
«О» (обычное исполнение) и «П» (прецизионное
исполнение). По классификации средств
измерений объема и массы жидкости,
приведенной в ГОСТ 8.510-2002, преобразователи
с индексом «О» относятся к рабочим
средствам измерений, а – с индексом
«П» – к рабочим эталонам 2-го разряда.
Диапазон номинального (условного
прохода) размера трубопроводаDN
от 10 до 150 мм, а преобразования расхода
Q
от 0.03 до 400
м3/ч.
Допускаемая
относительная погрешность преобразователя
расхода исполнения «О» от
![]() % до
% до![]() %,
от преобразуемого значения измеряемого
расхода., а преобразователя расхода
исполнения «П» –
%,
от преобразуемого значения измеряемого
расхода., а преобразователя расхода
исполнения «П» –![]() %.
%.
Преобразователь работает в комплекте с вторичным прибором, определяющим количество импульсов и переводящим их в значение расхода (расходомер) или объема (счетчик жидкости). В качестве вторичных приборов могут использоваться теплоэнергоконтроллеры ИМ2300, контроллеры измерительные регистрирующие МЕРАДАТ-М или аналогичные им.