

1.5. Методы измерений и измерительные схемы
1.5.1. Понятие о методах измерения
В автоматических системах измерения физических величин датчики включаются в измерительные схемы. Это позволяет увеличить чувствительность и точность измерений и уменьшить погрешность измерения от влияния внешней среды.
В основе разработки измерительных схем лежат методы измерений, которые делятся на метод непосредственной оценки (прямой метод) и методы сравнения.
Прямой метод применяется при непосредственной оценке физической величины одним прибором, шкала которого проградуирована в соответствующих единицах.
В методах сравнения измеряемая величина сравнивается с мерой. В измерительных схемах автоматических приборов наибольшее применение, из методов сравнения, нашли нулевой и дифференциальный метод.
Нулевой метод – это метод сравнения измеряемой величины с мерой (известной), при котором их совместное воздействие на индикатор доводится до нуля. При достижении равновесия наблюдается исчезновение тока или напряжения на нуль-индикаторе (нуль-приборе). В этот момент производится отсчет физической величины.
При дифференциальном методе, так же как и при нулевом, измеряемая величина сравнивается с мерой, а о значении измеряемой величины судят по разности этих величин. В дифференциальном методе происходит неполное уравновешивание измеряемой величины мерой, и в этом заключается отличие этого метода от нулевого.
При автоматическом контроле физических величин наибольшее распространение нашли измерительные схемы: мостовая, компенсационная и дифференциальная.
1.5.2. Мостовые измерительные схемы
Уравновешенный мост. Рассмотрим схему уравновешенного моста (рис. 1.21), предназначенного для измерения температуры среды.
Работа уравновешенного моста основана на нулевом методе измерений, т.е. в момент снятия отсчета температуры по шкале мост должен находиться в равновесии и стрелка миллиамперметра (нуль-прибора) установлена в положение 0. Это произойдет при условии
![]() ,
откуда
,
откуда
![]() .
(1.14)
.
(1.14)
Рис. 1.21. Принципиальная схема уравновешенного моста:
Е – э.д.с. источника
питания;
![]() – сопротивление датчика темпе-
ратуры (термосопротивления);mA– миллиамперметр с нулем по середине
шкалы; 1, 2, 3 – соединительные провода;
П – переключатель
– сопротивление датчика темпе-
ратуры (термосопротивления);mA– миллиамперметр с нулем по середине
шкалы; 1, 2, 3 – соединительные провода;
П – переключатель
Из
(1.14) следует, что при постоянных значениях
![]() и
и![]() изменение сопротивления
изменение сопротивления![]() ,
при изменении температуры среды, можно
компенсировать изменением сопротивления
,
при изменении температуры среды, можно
компенсировать изменением сопротивления![]() .
.
Таким
образом, измерение температуры сводится
к измерению сопротивления
![]() в тот момент, когда стрелка миллиамперметра
установлена на нуль. Шкала переменного
сопротивления
в тот момент, когда стрелка миллиамперметра
установлена на нуль. Шкала переменного
сопротивления![]() может быть проградуирована по температуре.
может быть проградуирована по температуре.
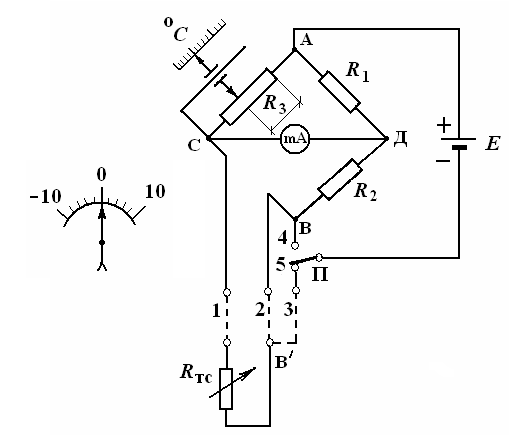 Резистор
Резистор
![]() может включаться в схему моста по двух
или трехпроводной схеме. Если переключатель
П установлен в положение 4, то соединительные
провода 1 и 2 включены в одно плечо СВ
моста. Изменение температуры окружающей
среды может в значительной степени
изменять сопротивления соединительных
проводов 1 и 2, и тем самым увеличивать
температурную погрешность прибора. При
установке переключателя в положение 5
резистор
может включаться в схему моста по двух
или трехпроводной схеме. Если переключатель
П установлен в положение 4, то соединительные
провода 1 и 2 включены в одно плечо СВ
моста. Изменение температуры окружающей
среды может в значительной степени
изменять сопротивления соединительных
проводов 1 и 2, и тем самым увеличивать
температурную погрешность прибора. При
установке переключателя в положение 5
резистор![]() включается по трехпроводной схеме. В
этом случае вершина В диагонали АВ
переносится в точку В
/
и соединительные
провода 1
и 2 включены в разные плечи моста, а
именно в плечо СВ
/
и ДВ
/,
что снижает
температурную погрешность прибора.
включается по трехпроводной схеме. В
этом случае вершина В диагонали АВ
переносится в точку В
/
и соединительные
провода 1
и 2 включены в разные плечи моста, а
именно в плечо СВ
/
и ДВ
/,
что снижает
температурную погрешность прибора.
В схеме уравновешенного моста колебания напряжения на источнике питания не влияют на точность измерения.
Уравновешенный мост является достаточно точным прибором и находит широкое применение в измерительных схемах автоматических мостов КСМ1 – КСМ4.
В неуравновешенных мостах об измеряемой температуре можно судить по отклонению стрелки миллиамперметра, если его шкалу проградуировать в градусах. Недостатком неуравновешенных мостов является их зависимость от колебания напряжения питания.
Неуравновешенные мосты широко применяются в компенсационных измерительных схемах автоматических потенциометров типа КСП1-КСП4, где питание моста осуществляется от стабилизированного источника питания.