

Конспект_ИЭЭ_14
.pdf120
5. Релятивистский закон сложения скоростей
y |
t |
y′ |
t′ |
|
|||
|
|
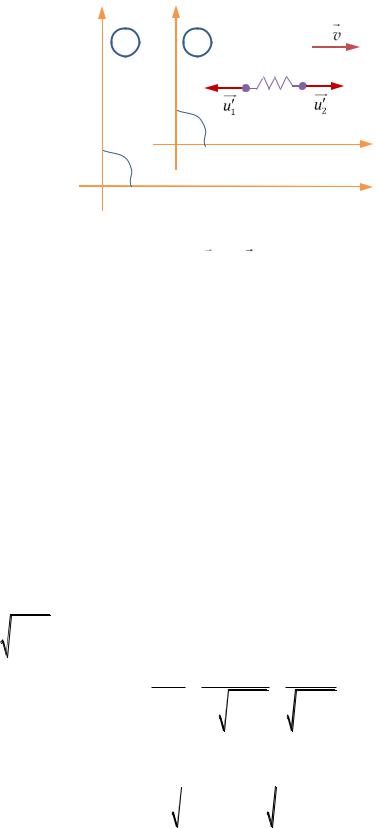
Пусть материальная точка M движется
со скоростью u |
|
относительно системы |
|
отсчёта K′ (РИС. 15.3). Найдём её скорость в системе отсчёта K.
По определению, проекции скорости в системе отсчёта K′
|
K′ |
O′ |
x′ |
K |
|
O |
x |
|
Рис. 15.3
наты и скорости в системе отсчёта K′:
|
dx |
|
dy |
|
dz |
; |
|
|
|
||||
ux |
dt |
, uy |
dt |
, uz |
dt |
|
|
|
|
|
в системе отсчёта K
ux |
dx |
, uy |
dy |
, uz |
dz |
. |
|
dt |
dt |
dt |
|||||
|
|
|
|
Выразим эти проекции через коорди-
ux
Итак,
|
|
|
|
|
|
|
|
|
dx vdt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dt |
v |
|
dx |
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
dx |
|
|
|
|
|
|
|
|
, dy dy , |
dz dz , |
dt |
|
|
|
|
|
|
|
; |
|
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
2 |
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
v |
2 |
|
|
|
|
|
|
|
|
|
v |
2 |
|
|
|
|
|
|
|
|
|
v |
2 |
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
dy |
|
1 |
|
|
|
|
u |
|
|
1 |
|
|
|
|
|
|
|
u |
1 |
|
||||||||||||||
|
dx vdt |
|
|
u |
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
y |
|
|
|
|
c |
2 |
|
|
|
|
|
z |
|
|
|
c |
2 |
|||||||||||||||
|
|
|
|
|
|
|
|
x |
|
|
|
|
|
, uy |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
, uz |
|
|
|
|
|||||||||||
|
|
|
v |
|
|
|
|
|
v |
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
v |
|
|
|
||||||||||||||||||
|
dt |
|
dx |
|
1 |
|
|
|
|
dt |
|
|
dx |
|
1 |
u |
|
|
|
|
|
|
|
1 |
u |
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||
|
|
|
|
c |
2 |
|
|
|
|
|
c |
2 |
|
x |
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
|
|
|
c |
2 |
|
x |
|
|
|
|
|
|
|
c |
2 |
|
x |
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
1 |
v2 |
|
|
|
|
|
u |
|
|
1 v2 |
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
u |
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
y |
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
z |
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
ux |
x |
|
|
|
|
|
|
, u |
|
|
|
|
|
|
|
|
|
|
|
|
, u |
|
|
|
|
|
|
|
|
|
|
|
|
. |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
v |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
y |
|
|
|
|
v |
|
|
u |
|
|
|
|
|
z |
|
|
|
|
|
v |
u |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
x |
|
|
|
|
|
c |
2 |
|
|
x |
|
|
|
|
|
|
|
|
c |
2 |
|
x |
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
.
Ускорение не является инвариантом преобразований Лоренца. Формулы для преобразования компонент ускорений можно получить аналогичным образом – исходя из определения и преобразований Лоренца:
adux
xdt
|
du |
x |
|
, ax |
dt |
|
…
1.13. Релятивистская динамика
1.13.1. Релятивистский импульс
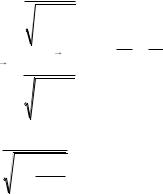
Рассмотрим замкнутую механическую систему – два груза одинаковой массы m0, соединённых пружиной (РИС. 15.4). В системе отсчёта K′ центр масс данной механической системы покоится. В начальном состоянии пружина сжата, затем она
разжимается и грузы движутся со скоростями
u |
u |
1 |
|
и u u .
2
Должен выполняться закон сохранения импульса: импульс данной замкнутой механической системы должен сохраняться в любой инерциальной системе отсчёта.
|
|
|
|
|
|
121 |
|
|
|
|
|
|
|||
y |
|
t |
y′ |
|
|
|
t′ |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
m0 |
|||||||
|
|
|
|
|
|
|
|
m0 |
|
|
|||||
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
K′ |
|
|
|
|
|
|
|
|
|
|
|
|
K |
O′ |
|
|
|
|
|
|
|
|
|
|
|
x′ |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
O |
|
|
|
|
|
Рис. 15.4 |
|
|
|
|
|
x |
|||
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
||||
Определим импульс материальной точки, как в классической механике: |
|||||||||||||||
|
|
|
|
|
|
p m0u . |
|
|
|
|
|
|
|||
Используя РЕЛЯТИВИСТСКИЙ ЗАКОН СЛОЖЕНИЯ СКОРОСТЕЙ, получим в системе отсчёта K: |
|||||||||||||||
проекция начального импульса системы на ось x |
|
|
|
|
|||||||||||
|
|
|
|
|
|
P1x 2m0v |
, |
|
|
|
|
|
|||
проекция конечного импульса |
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
P |
m |
|
|
v u |
m |
v u |
. |
||||||
|
|
|
|
|
|||||||||||
|
|
2x |
0 |
|
|
v |
u |
0 |
|
|
v |
u |
|||
|
|
|
|
1 |
|
|
1 |
|
|||||||
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
c2 |
|
|
|
c2 |
||||
Видно, что P1x ≠ P2x. Получается., что в системе отсчёта K закон сохранения не выполняется, чего не может быть.
Подберём такое выражение для импульса, чтобы py py . (В классической механи-
ке p |
|
m |
dy |
; так как dy = dy′, а dt = dt′, при таком определении p |
p |
|
.) Возьмём в |
y |
|
y |
|||||
|
0 |
dt |
y |
|
|
||
|
|
|
|
|
|
|
качестве элементарного промежутка времени собственное время dτ = dτ′. Тогда
Но
|
|
|
2 |
|
dτ dt |
1 |
u |
||
c |
2 |
|||
|
|
|||
|
|
|
||
|
dy |
m0 |
dy |
py . |
|
|
|||
py m0 |
dτ |
dτ |
||
|
|
|
, поэтому
p |
|
|
m dy |
|
m dy |
|
|
|
0 |
0 |
|
|
|||
|
|
|
|
|
|
||
|
y |
|
dτ |
|
|
u |
|
|
|
|
|
|
|
|
2 |
|
|
|
|
dt |
1 |
c |
2 |
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
аналогично
|
m u |
y |
|
|
|
0 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
1 |
u |
||
|
c |
2 |
||
|
|
|||
|
|
|
||
,
p |
|
|
|
m0ux |
|
|
, p |
|
m0uz |
|
|
; |
||
x |
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
z |
|
|
|
||||
|
|
|
1 |
u2 |
|
|
|
1 |
u2 |
|
|
|
||
|
|
c2 |
c2 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||
в векторной форме

122
p |
m u |
|
|
0 |
|
|
|
|
|
|
|
|
|
|
2 |
|
1 |
u |
|
|
c |
2 |
|
|
|
||
|
|
|
|
.
Запишем это определение в виде, аналогичном формуле классической механики:
p здесь m – релятивистская масса:
m
mu |
, |
|||
|
|
|||
m |
|
|
|
|
0 |
|
|
|
|
|
|
|
2 |
|
1 |
u |
|||
c |
2 |
|||
|
||||
|
|
|||
.
1.13.2. Релятивистское уравнение динамики материальной точки
Если материальная точка изолирована, то её импульс |
p mu const . Если на точ- |
ку действуют другие объекты, то мера взаимодействия – сила F . Запишем уравнение динамики:
|
|
p F |
|
t |
||
или, подставляя выражение для релятивистского импульса, |
||||||
|
|
|
|
|
|
|
|
d |
m u |
|
F |
|
|
|
dt |
0 |
u |
|
||
|
|
|
||||
|
|
|
|
|||
|
|
|
|
2 |
|
|
|
|
1 |
c |
2 |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
– релятивистское уравнение динамики материальной точки.
Так как F f v,t и ни время, ни скорость не являются инвариантами преобразо-
ваний Лоренца, то и сила не является релятивистским инвариантом. Поэтому полученное уравнение динамики малополезно для решения задач.
1.13.3. Энергия в релятивистской механике
Пусть тело движется под воздействием других объектов, которое описывается
силой F , направленной параллельно перемещению |
l |
(РИС. 15.5). Тело разгоняет- |
||||||
ся от начальной скорости u0 0 |
до скорости u . |
|
|
|||||
|
|
|
|
|
|
|
x |
|
|
|
|
|
|
|
|
|
|
O |
|
|
|
|
|
|||
|
|
|
|
|
|
|||
t 0 |
|
|
t 0 |
|
|
|||
x 0 |
|
|
x 0 |
|
|
|||
u 0 |
|
|
u 0 |
|
|
|||
Wк 0 |
Wк 0 |
|
|
|||||
|
|
|
Рис. 15.5 |
|
|
|||
По теореме об изменении кинетической энергии работа силы F |
||||||||
|
|
|
A |
Wк Wк . |
|
|
||

123
Найдём работу и, соответственно, кинетическую энергию тела. Элементарная работа на малом перемещении dl (dl = dx)
δA Fdl
Fdxcos0 Fdx
;
так как из релятивистского уравнения динамики
пульс p mu
δA |
d mu |
dx ud mu . |
|
dt |
|||
|
|
Проинтегрируем это выражение:
F
dp dt
, релятивистский им-
|
|
u |
ud mu u mu |
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
u |
|
|
|
|
|
m |
|
|
2u du |
||||||||||||||||
к |
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
||||||||||||||||||||||||
A W |
|
|
|
mudu mu |
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||||||||||
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
u |
|||||||||||||||||||||||||||||||
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
1 |
|
2 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
u |
|
u |
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
u |
|
|
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
m c |
2 |
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
|||||||||||||||
|
|
|
2 |
|
|
|
c |
|
|
|
2 |
m |
|
|
|
|
|
|
|
|
|
|
|
|
|
m c |
2 |
|
||||||||||||||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
mu |
|
|
|
|
|
|
|
|
|
|
|
|
mu |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
2 |
|
|
1 2 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
u |
|
|
|
|
0 |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
2 |
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
c |
2 |
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
2 |
|
|
|
|
m c |
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
m u |
|
|
|
|
|
|
|
|
|
m u |
|
|
m c2 mc2 m c2 |
, |
|
||||||||||||||||||||||||||||
|
|
|
0 |
|
|
|
0 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
|
1 |
u |
|
|
|
1 |
u |
|
|
1 |
u |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
c |
2 |
|
|
|
c |
2 |
|
|
|
c |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
W mc |
2 |
m c |
2 |
. |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
к |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
При u << c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
2 |
|
||||
|
|
W m c |
2 |
|
|
|
|
|
|
1 m c |
2 |
1 |
u |
|
|
1 |
|
m u |
|
|
||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|||||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||
|
|
|
к |
|
0 |
|
|
|
u |
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
2c |
2 |
|
|
|
|
|
|
|
2 |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
1 |
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
c |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
– результат классической механики.
Полная энергия
|
|
2 |
|
|
|
|
W mc |
. |
|
|
|
|
|
|
|
|
|
Представим |
|
|
|
|
|
2 |
W m c |
2 |
|||
W mc |
|
||||
|
|
к |
|
0 |
|
При u = 0 W = W0 = m0c2; |
|
|
|
|
|
|
W m c2 |
|
|
||
|
0 |
0 |
|
|
|
.
– энергия покоя.
Энергия покоя может переходить в другие виды энергии.

124
ПРИМЕРЫ
1) Реакция аннигиляции
При взаимодействии частицы и её античастицы они аннигилируют (взаимно уничтожаются) с образованием фотонов. Например, реакция электрона и позитрона
e |
|
|
m0
|
|
e |
m0
2γ ,
 m0 = 0
m0 = 0
γ – фотон рентгеновского излучения. Массы покоя электрона и позитрона одинаковы (m0), а масса покоя фотона равна нулю. Энергия покоя электрона и позитрона переходит в энергию фотона (энергию электромагнитного поля).
2) Дефект масс
Атомные ядра состоят из нуклонов – протонов и нейтронов (см. РАЗДЕЛ 7.1.1). Массы покоя протона и нейтрона в свободном состоянии соответственно равны mp и mn; масса ядра – mя.
Всегда масса ядра меньше суммы масс составляющих его нуклонов:
m Zm A Z |
|
я |
p |
здесь Z – число протонов в ядре – заряд ядра, нейтронов в ядре. Разность
mn
A –
,
массовое число, (A – Z) – число
m0
Zm A Z m m |
||
p |
n |
я |
0
,
– дефект масс.
Рассмотрим реакцию синтеза атомного ядра (см. РАЗДЕЛ 7.3.5) – реакцию получе-
ния ядра из отдельных нуклонов. Изменение энергии системы нуклонов
к |
|
|
|
0 |
|
W W |
|
m c |
|
||
|
|
|
|
2 |
|
В замкнутой системе W = 0. Поэтому |
|
|
|
|
|
Wк c |
2 |
m0 |
|
|
|
|
|
||||
|
W c |
||
|
|
|
2 |
|
к |
|
|
m |
W |
||
|
к |
||
|
|
|
|
0 |
|
c |
2 |
|
|
|
|
m0
.
.
1.13.4. Вектор энергии-импульса
В 4-пространстве оперируют физическими величинами – 4-векторами.
4-вектор энергии-импульса
|
i |
W |
|
||
|
c |
|
|
||
|
|
||||
|
|
|
|
||
|
|
|
|
||
P |
|
px |
|
. |
|
|
|
|
|
|
|
|
p |
|
|
||
|
|
y |
|
|
|
|
|
|
|||
|
|
pz |
|
|
|
|
|
|
|
||
|
|
|
|
|
|
Найдём модуль вектора энергии-импульса:
125
W |
|
m c |
2 |
|
||||
|
|
|
||||||
|
|
0 |
|
|
|
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
u |
||||
|
|
|
|
c |
2 |
|||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
p |
|
m u |
|
||||
|
|
|
0 |
|
|
|
||
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
2 |
|
|
|
1 |
u |
||||
|
|
|
c |
2 |
||||
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
W |
m c |
2 |
|
|
|
|
||
|
|
|
|
|
||||
|
0 |
|
|
|
|
|
||
|
|
|
|
|
|
|
||
|
1 |
c |
2 |
p |
2 |
|
||
|
|
|
|
|||||
|
W |
2 |
|
|||||
|
|
|
|
|||||
|
|
|
|
|
|
|||
,
|
p |
|
u |
, |
u |
|
cp |
; |
||
W |
c |
2 |
c |
W |
||||||
|
|
|
|
|
||||||
|
|
|
|
|
|
|||||
2 |
2 |
2 |
2 |
4 |
inv |
W |
c p |
m c |
|||
|
|
|
0 |
|
|
– модуль вектора энергии-импульса является релятивистским инвариантом.

126
Лекция 16
1.14. Механические колебания40
1.14.1. Виды колебаний
Колебания – периодические изменения какой-либо физической величины во времени. Система тел, в которой происходят колебания, – колебательная си-
стема.
Колебания могут иметь разную физическою природу, но схожее математическое описание. Сейчас мы будем рассматривать механические колебания.
|
Колебания |
|
|
свободные |
вынужденные |
||
колебательная система |
|||
при периодическом внешнем |
|||
предоставлена самой себе |
|||
воздействии |
|||
|
|
||
незатухающие |
затухающие |
|
|
|
|
||
W↓
1.14.2. Свободные незатухающие колебания (собственные колебания)
Рассмотрим свободные колебания пружинного маятника (трения нет) в горизонтальном направлении. Груз – материальная точка массы m – колеблется на пружине жёсткостью k (РИС. 16.1), после того как его вывели из положения равновесия (точка O) и предоставили систему самой себе.
k
m
O |
x |
|
Запишем II закон Ньютона для груза: |
Рис. 16.1 |
ma Fт N Fупр . |
|
Спроецируем это уравнение на ось x. Так как Fупр x = –kx,
max
kx
.
По определению, ax d2x2 . Получим дифференциальное уравнение dt
m |
d2x |
kx 0 |
|
d2x |
|||||
dt2 |
dt |
2 |
|||||||
|
|
|
|
|
|||||
Обозначим |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
k |
ω02 |
; |
|
||
|
|
|
|
m |
|
||||
|
|
|
|
|
|
|
|
||
|
k |
x |
|
m |
|||
|
|
0
.
40 Материал параграфов 1.14 и 1.15 входит в экзаменационную программу II семестра. Материал лекций 16 и 17 может быть, по обстоятельствам, прочитан во II семестре перед темой «ЭЛЕКТРОМАГНИТНЫЕ КОЛЕБАНИЯ» или параллельно материалу этой темы.

127
d |
2 |
x |
|
|
|
2 |
|
||
|
|
2 |
ω x 0 |
(16.1) |
dt |
0 |
|||
|
|
|
||
– дифференциальное уравнение свободных гармонических колебаний.
Это линейное однородное дифференциальное уравнение второго порядка. Его общее решение41
x t Acos ω0t φ
(16.2)
содержит две произвольные константы A и φ. Данные константы определяются из начальных условий.
Пусть при t = 0 x = x0, vx = 0 (груз оттянули на x0 и отпустили без начальной скорости). Первая производная функции (16.2) – проекция скорости груза на ось x
dx v |
x |
t Aω sin ω t φ . |
(16.3) |
|
dt |
0 |
0 |
|
|
|
|
|
|
|
Подставим начальные условия в функции (16.2) и (16.3) и найдём константы A и
φ:
x 0 |
Acosφ, |
|
|
x |
0 |
Acosφ, |
||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
0 |
|
0 |
||||
|
|
|
|
|
|
|
||||
v |
x |
|
0 |
|
Aω sinφ |
|
|
Aω sin |
||
|
|
|
|
0 |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
Частное решение дифференциального уравнения условиях
|
|
|
|
φ |
|
|
(16.1)
φ 0, |
|
A x |
. |
0 |
|
при данных начальных
x t x |
cosω t |
0 |
0 |
проекции скорости и ускорения на ось x |
|
;
vx t x0ω0 cosω0t , ax t x0ω02 cosω0t .
Графики функций x(t), vx(t), ax(t) представлены на РИС. 16.2. Решение (16.2) – гар-
моническая функция.
В общем решении (16.2):
A – амплитуда колебаний – максимальное отклонение колеблющейся величины от равновесного значения;
ω0 – циклическая частота;
выражение в скобках (аргумент косинуса) – фаза колебаний;
φ – начальная фаза.
Введём другие характеристики гармонических колебаний:
период T – время, за которое колебательная система совершает одно полное колебание;
частота ν – число полных колебаний в единичный промежуток времени;
T
ω0
2π |
, |
ν |
ω0 |
|
1 |
; |
|
ω |
2π |
T |
|||||
|
|
|
|
||||
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
радс с 1 , ν Гц.
41 Студентам предлагается проверить самостоятельно, является ли формула (16.2) общим решением дифференциального уравнения (16.1).

128
x x0
0 |
t |
–x0
а
vx
x0ω0
0 |
t |
–x0ω0
б
ax
0 |
t |
в
Рис. 16.2
Энергия колебаний (механическая энергия колебательной системы)
W Wк Wп m2v2 kx22 const
(студенты проверяют выполнение этого равенства самостоятельно).

129
Демонстрация: Пружинные маятники
ПРИМЕРЫ
1. Математический маятник
z
φl
Математический маятник – материальная точка,
подвешенная на невесомой нерастяжимой нити в однородном гравитационном поле.
Найдём период колебаний математического маятника массы m на нити длиной l (РИС. 16.3). Запишем II закон Ньютона:
ma Fт T .
mСпроецируем это уравнение на оси естественной системы координат:
|
man T Fт cosφ , |
|
Рис. 16.3 |
maτ Fт sinφ . |
(16.4) |
Груз вращается вокруг оси z по окружности радиуса l. Выразим тангенциальное ускорение маятника через угловое ускорение:
aτ εzl |
, |
||
а по определению |
|
|
|
ε |
z |
d2φ . |
|
|
dt2 |
|
|
Подставим (16.5) и (16.6), а также Fт = mg в уравнение (16.4):
|
2 |
|
|
|
|
|
|
|
m |
d φ |
l |
mgsinφ |
|||||
|
|
|
|
|||||
|
dt |
2 |
|
|
|
|
, |
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
||
|
2 |
|
|
|
|
g |
|
|
d φ |
|
sinφ 0 |
. |
|||||
dt |
2 |
|
l |
|||||
|
|
|
|
|||||
|
|
|
|
|
||||
|
|
|
|
|
|
|||
При малых углах sin φ ≈ φ и это дифференциальное уравнение примет вид
(16.5)
(16.6)
2 |
φ |
|
d |
||
dt |
2 |
|
|
||
ω |
φ |
2 |
|
0 |
|
0
,
– дифференциальное уравнение свободных гармонических колебаний, где
ω0 
 gl .
gl .
Период колебаний математического маятника T 2π ,
ω0
T 2π 
 gl
gl
зависит только от его длины.