

2.5. Порядок выполнения работы
Задание 1. Изучение основных положений теории устойчивости линейных САУ
1. Изучить основные определения, необходимые и достаточные условия устойчивости.
2. Изучить критерии устойчивости линейных систем.
3. Изучить метод D-разбиения по одному параметру системы.
Задание 2. Анализ устойчивости САУ углом крена ЛА
1. По дифференциальным уравнениям определить передаточные функции звеньев и передаточную функцию замкнутой системы.
2. Определить характеристическое уравнение замкнутой системы.
3.
Построить границу D
– разбиения в зависимости от коэффициента
усиления
![]() .
.
4.
Выбрав значение
![]() из внутренней областиD
– разбиения, проверить устойчивость
замкнутой системы по критерию Гурвица.
из внутренней областиD
– разбиения, проверить устойчивость
замкнутой системы по критерию Гурвица.
Задание 3. Моделирование САУ углом крена ЛА
1. Составить программу моделирования САУ в пакете Control системы Matlab
2. Составить схему моделирования САУ в пакете SimuLink системы Matlab.
3. Определить устойчивость системы по критериям Михайлова, Найквиста, построить логарифмические частотные характеристики разомкнутой системы и определить запасы устойчивости по амплитуде и по фазе.
4.
Построить
переходную функцию и определить
показатели качества переходной функции
при различных значениях коэффициента
![]() .
.
2.6. Требования к отчету
Отчет по работе должен содержать:
1. Цель работы;
2. Структурные схемы;
3. Результаты расчетов;
4. Результаты моделирования;
5. Выводы.
По заданию 1 в отчёте приводятся функциональная и структурная схемы САУ, основные положения теории устойчивости систем.
По
заданию 2 в отчете приводятся результаты
вывода передаточных функций,
характеристическое уравнение системы
и расчет коэффициента
![]() с помощью методаD
– разбиения.
с помощью методаD
– разбиения.
По заданию 3 в отчёте приводятся полученные графики частот-ных и временных характеристик системы, их анализ.
2.7. Контрольные вопросы
1. Как определяется передаточная функция замкнутой системы?
2. Дайте определение устойчивости системы автоматического управления.
3. Как определить характеристическое уравнение системы?
4. Как влияет расположение корней характеристического уравнения на устойчивость системы?
5. Как определить устойчивость системы по критерию Гурвица?
6. Как определить устойчивость линейных систем по частотным критериям?
7. Как определить запасы устойчивости по амплитуде и по фазе?
8. Как построить области устойчивости в плоскости одного параметра?
9. Как производят разметку областей устойчивости?
Лабораторная работа № 3
Исследование методов коррекции систем автоматического управления
3.1. Цель работы
Целью настоящей работы является изучение влияния корректирующих обратных связей на точность, быстродействие и показатели качества переходных процессов систем автоматического управления.
3.2. Теоретическая часть
3.2.1. Назначение и виды коррекции динамических свойств САУ
Коррекция динамических свойств САУ используется для выполнения требований по устойчивости, точности и качеству переходных процессов [1-5].
С точки зрения требований к точности САУ в установившихся режимах коррекция динамических свойств САУ может понадобиться для увеличения коэффициента передачи или порядка астатизма при сохранении устойчивости и определенного качества переходных процессов.
Коррекция применяется также как средство обеспечения устойчивости неустойчивой САУ, расширения области устойчивости, повышения качественных показателей переходных процессов.
Осуществляется коррекция с помощью введения в систему корректирующих устройств с определенной, заранее подобранной передаточной функцией. Корректирующие устройства могут включаться последовательно (рис. 3.1, а) или параллельно: согласно параллельно (рис. 3.1, б) и встречно параллельно (рис. 3.1, в) с основными звеньями САУ. Последний тип коррекции называется также коррекцией с помощью корректирующих обратных связей.
Последовательное
корректирующее устройство
![]() включают непосредственно после датчика
рассогласования или же после
предварительного усилителя (рис. 3.1,а).
Это связано с тем, что уровень сигнала
рассогласования обычно весьма мал и
корректирующее устройство снижает чаще
всего уровень сигнала. Применение
последовательных корректирующих
устройств наиболее удобно в системах,
у которых сигнал управления представляет
собой напряжение постоянного тока.
включают непосредственно после датчика
рассогласования или же после
предварительного усилителя (рис. 3.1,а).
Это связано с тем, что уровень сигнала
рассогласования обычно весьма мал и
корректирующее устройство снижает чаще
всего уровень сигнала. Применение
последовательных корректирующих
устройств наиболее удобно в системах,
у которых сигнал управления представляет
собой напряжение постоянного тока.
Применяют
и второй вариант включения корректирующего
устройства
![]() в систему – параллельно одному из
участков ее прямой цепи (рис. 3.1,б).
Такое параллельное корректирующее
устройство оказывается весьма удобным
– при меньшей сложности обеспечивает
нужное преобразование сигнала управления.
в систему – параллельно одному из
участков ее прямой цепи (рис. 3.1,б).
Такое параллельное корректирующее
устройство оказывается весьма удобным
– при меньшей сложности обеспечивает
нужное преобразование сигнала управления.
Другое,
широко распространенное включение
корректирующего устройства показано
на рис. 3.1, в.
В данном случае корректирующее устройство
![]() является обратной связью, чаще всего
отрицательной, которая охватывает один
из элементов прямой цепи системы. Этим
элементом обычно является исполнительный
элемент или выходной каскад усилителя.
является обратной связью, чаще всего
отрицательной, которая охватывает один
из элементов прямой цепи системы. Этим
элементом обычно является исполнительный
элемент или выходной каскад усилителя.
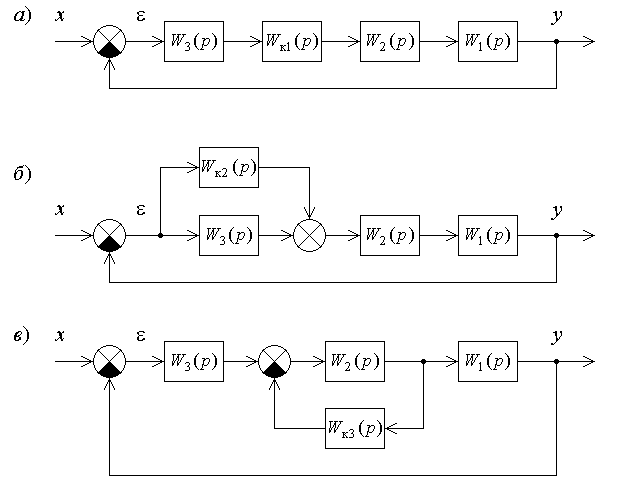
Рис. 3.1. Схемы включения корректирующих устройств в САУ
В линейных системах для корректирующего устройства одного типа всегда можно подобрать эквивалентное устройство другого типа. Переход от одного типа устройства к эквивалентному другому типу производится при помощи формул перехода, которые получаются приравниванием передаточных функций разомкнутых цепей.
По каждой из структурных схем (рис. 3.1) составим выражение передаточной функции разомкнутой цепи и приравняем эти выражения друг другу. Получаем
 , (3.1)
, (3.1)
где
![]() .
.
Из (3.1) определяют формулы перехода от одного вида корректирующего устройства к другому:
![]()
![]()
![]()
При
отрицательном значении передаточной
функции
![]() выходной сигнал этого устройства должен
вычитаться из выходного сигнала участка
выходной сигнал этого устройства должен
вычитаться из выходного сигнала участка![]() .
Если значение передаточной функции
.
Если значение передаточной функции![]() оказывается отрицательным, то это
устройство должно включаться в виде
положительной обратной связи.
оказывается отрицательным, то это
устройство должно включаться в виде
положительной обратной связи.
В настоящее время корректирующие устройства являются основным способом повышения качества линейных непрерывных систем управления по отклонению.
3.2.2. Последовательные корректирующие звенья в САУ
Корректирующие
звенья последовательного типа применяются
в САУ с электрическим сигналом в виде
напряжения постоянного тока
![]() ,
который функционально связан с ошибкой
,
который функционально связан с ошибкой![]() системы, т.е.
системы, т.е.![]() ,
например
,
например![]() .
Этот сигнал подается на вход таких
корректирующих звеньев.
.
Этот сигнал подается на вход таких
корректирующих звеньев.
Корректирующие звенья в большинстве случаев представляют собой типовые динамические звенья, основное назначение которых изменять свойства САУ в нужном направлении, и реализуются на пассивных или активных RLC-элементах.
Широкое применение получили следующие последовательные корректирующие звенья [4]: пропорционально-дифференцирующее (ПД), пропорционально-интегрирующее (ПИ), пропорционально-интегро-дифференцирующее (ПИД).
Пропорционально-дифференцирующее звено. Идеальное ПД-звено имеет следующую передаточную функцию
![]() , (3.2)
, (3.2)
где
![]() .
.
Выходная
величина звена содержит две составляющие:
пропорциональную входной величине и
пропорциональную ее первой производной.
Введение воздействия по производной
изменяет значение коэффициента при
![]() в первой степени в характеристическом
полиноме
в первой степени в характеристическом
полиноме![]() замкнутой САУ. Это изменяет условия
устойчивости и качество переходных
процессов в САУ. Например, применение
ПД-звеньев позволяет сделать структурно
неустойчивые САУ структурно устойчивыми,
т.е. обеспечивает устойчивость САУ с
астатизмом выше первого порядка. Также
можно сделать устойчивой САУ, структурно
неустойчивую из-за наличия в ней
неустойчивых звеньев.
замкнутой САУ. Это изменяет условия
устойчивости и качество переходных
процессов в САУ. Например, применение
ПД-звеньев позволяет сделать структурно
неустойчивые САУ структурно устойчивыми,
т.е. обеспечивает устойчивость САУ с
астатизмом выше первого порядка. Также
можно сделать устойчивой САУ, структурно
неустойчивую из-за наличия в ней
неустойчивых звеньев.
ПД-звено является фильтром верхних частот, так как ЛАХ растет с увеличением частоты, расширяет полосу пропускания САУ, т.е. повышает ее быстродействие. ФЧХ ПД-звена положительна, звено уменьшает суммарное запаздывание по фазе в САУ.
Положительное
ПД-воздействие (![]() )
форсирует течение переходного процесса,
отрицательное ПД-воздействие (
)
форсирует течение переходного процесса,
отрицательное ПД-воздействие (![]() )
– замедляет течение переходного
процесса.
)
– замедляет течение переходного
процесса.
Реальное ПД-звено обычно обладает инерционностью, его передаточная функция
![]() , (3.3)
, (3.3)
где
![]() ,
,![]() ,
,![]() .
.
Пропорционально-интегрирующее звено. Идеальное ПИ-звено имеет передаточную функцию
![]() ; (3.4)
; (3.4)
реальное ПИ-звено –
![]() , (3.5)
, (3.5)
где
![]() .
.
Таким образом, ПИ-звено эквивалентно последовательному соединению интегрирующего звена и ПД-звена.
Частотные свойства ПИ-звена, как фильтра нижних частот, обратны таковым у ПД-звена.
ПИ-звено обычно применяют для повышения порядка астатизма при сохранении устойчивости и необходимого качества переходных процессов. При этом знак для воздействия по интегралу должен быть положительным; знак воздействия по производной может быть любым.
Пропорционально-интегро-дифференцирующее звено. Иде-альное ПИД-звено имеет передаточную функцию
![]() ; (3.6)
; (3.6)
реальное ПИД-звено –
![]() , (3.7)
, (3.7)
где
![]() ;
;![]() .
.
ПИД-звено эквивалентно последовательному соединению либо интегрирующего звена и ПД-звена с воздействием по двум производным, либо ПИ-звена и ПД-звена с одной производной.
Частотные характеристики этого звена получаются сложением характеристик ПИ и ПД звеньев. Соответственно такое звено подчеркивает как нижние, так и верхние частоты, подавляя средние.
ПИД-звено повышает порядок астатизма (как и ПИ-звено) и дает более сильную коррекцию динамических свойств САУ.
Часто интегро-дифференцирующими звеньями называют не только звенья с передаточной функцией (3.7), но и другие звенья, АЧХ которых имеет минимум на средних частотах и растет в сторону как низких, так и высоких частот. Такую характеристику имеет, например, звено с передаточной функцией
![]() . (3.8)
. (3.8)
3.2.3. Параллельные корректирующие звенья в САУ
Рассмотренные выше корректирующие звенья имеют в числителе передаточной функции сумму пропорционального, дифференцирующего и интегрирующего слагаемых. Поэтому эти звенья можно представить в виде параллельно соединенных звеньев соответствующего действия [4, 5].
Параллельные
корректирующие звенья используются в
тех случаях, когда необходимо осуществить
сложный закон управления с введением
производных, интегралов и других функций
от ошибки
![]() в САУ.
в САУ.
Введение
производных (![]() ,
,![]() и т.д.) соответствует поднятию верхних
частот и преследует цель увеличить
запас устойчивости системы.
и т.д.) соответствует поднятию верхних
частот и преследует цель увеличить
запас устойчивости системы.
Введение
интегралов от ошибки управления
![]() соответствует поднятию нижних частот
и преследует цель уменьшить значение
установившейся ошибки управления или
сделать ее равной нулю.
соответствует поднятию нижних частот
и преследует цель уменьшить значение
установившейся ошибки управления или
сделать ее равной нулю.
В системах автоматического управления в зависимости от вида примененной параллельной коррекции регуляторы классифицируются на следующие типы: пропорциональный (П-регулятор), пропорционально-дифференцирующий (ПД-регулятор), пропорционально-интегрирующий (ПИ-регулятор) и пропорционально-интегро-дифференцирующий (ПИД-регулятор). Соответственно говорят об одноименных алгоритмах или законах управления.
П-алгоритм управления
![]() . (3.9)
. (3.9)
ПД-алгоритм управления
![]() . (3.10)
. (3.10)
ПИ-алгоритм управления
![]() . (3.11)
. (3.11)
ПИД-алгоритм управления
![]() . (3.12)
. (3.12)
Здесь
![]() – выходной сигнал управляющего
устройства.
– выходной сигнал управляющего
устройства.
3.2.4. Корректирующие обратные связи в САУ
Корректирующие устройства в виде корректирующих обратных связей (ОС) находят широкое распространение вследствие удобства технической реализации и обладают следующими достоинствами [4]:
- простота – вследствие того, что на вход элемента ОС поступает обычно сигнал высокого уровня с выхода САУ, что не только не требует усилителей, но, напротив, требует ослабления сигнала для его согласования с входным сигналом;
- в реальной САУ, как правило, всегда имеют место нелинейности, которые при охвате САУ отрицательной ОС существенно ослабляют свое влияние на процессы управления, что дает возможность улучшить переходной процесс в САУ по сравнению с другими видами корректирующих устройств;
- отрицательная ОС дает лучший эффект, когда в САУ вследствие действия внешних факторов изменяются параметры САУ – коэффициенты усиления, постоянные времени, т.е. эта ОС стабилизирует параметры охваченной части САУ.
При
охвате звена с передаточной функцией
![]() обратной связью с передаточной функцией
обратной связью с передаточной функцией![]() получим передаточную функцию замкнутой
системы (рис. 3.2)
получим передаточную функцию замкнутой
системы (рис. 3.2)
![]() , (3.13)
, (3.13)
где плюс в знаменателе соответствует отрицательной (ООС), а минус положительной (ПОС) обратным связям.
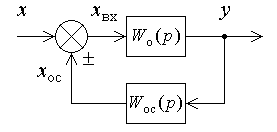
Рис. 3.2. Корректирующая обратная связь
Корректирующие
обратные связи, помимо классификации
на отрицательные и положительные,
делятся на жесткие и гибкие. Жесткая
обратная связь (ЖОС) осуществляется
статическим звеном с передаточной
функцией
![]() ,
а гибкая обратная связь (ГОС)–
дифференцирующим звеном с передаточной
функцией
,
а гибкая обратная связь (ГОС)–
дифференцирующим звеном с передаточной
функцией
![]() .
В последнем случае
.
В последнем случае![]() ,
и, следовательно, в статике сигнал
обратной связи отсутствует, т.е. гибкая
обратная связь действует только в
динамике, с чем и связано ее наименование.
,
и, следовательно, в статике сигнал
обратной связи отсутствует, т.е. гибкая
обратная связь действует только в
динамике, с чем и связано ее наименование.
Жесткие корректирующие обратные связи. Рассмотрим действие идеальной жесткой обратной связи. Ее передаточная функция
![]() . (3.14)
. (3.14)
В случае если эта обратная связь охватывает простое апериодическое звено с передаточной функцией
![]()
по формуле (3.4), получим
![]() ,
,
где
![]() ;
;
![]()
Отсюда
следует, что охват апериодического
звена жесткой обратной связью, не изменяя
структуры звена, изменяет коэффициент
передачи и постоянную времени в
![]() раз, т.е. они уменьшаются в случае
отрицательной ОС и увеличиваются при
положительной ОС. Поэтому в качестве
корректирующей обратной связи применяется
в основном отрицательная жесткая ОС
для уменьшения инерционности.
раз, т.е. они уменьшаются в случае
отрицательной ОС и увеличиваются при
положительной ОС. Поэтому в качестве
корректирующей обратной связи применяется
в основном отрицательная жесткая ОС
для уменьшения инерционности.
Можно
показать, что при охвате такой обратной
связью статического звена любого
порядка, т.е. когда
![]() ,
где
,
где![]() ,
происходит такое же изменение в
,
происходит такое же изменение в![]() раз коэффициента передачи
раз коэффициента передачи![]() и всех коэффициентов полинома
и всех коэффициентов полинома![]() .
.
При охвате жесткой ОС интегрирующего звена с передаточной функцией
![]()
имеем
![]() ,
,
где
![]() ;
;
![]() .
.
Таким образом, при охвате интегрирующего звена жесткой ОС оно превращается в статическое. Отрицательная ОС вокруг интегрирующего звена широко применяется для снижения порядка астатизма системы и соответственно для улучшения ее устойчивости в тех случаях, когда у системы оказывается излишний порядок астатизма, например в исполнительных устройствах.
В случае инерционной жесткой ОС с передаточной функцией
![]()
порядок
знаменателя передаточной функции
замкнутой цепи
![]() повышается на единицу по сравнению с
порядком передаточной функции прямой
цепи
повышается на единицу по сравнению с
порядком передаточной функции прямой
цепи![]() .
Если, например
.
Если, например
![]() ,
,
то
можно убедиться, что в передаточной
функции замкнутой цепи
![]() в числителе появится форсирующее звено,
а знаменатель будет звеном второго
порядка.
в числителе появится форсирующее звено,
а знаменатель будет звеном второго
порядка.
Следовательно, инерционность отрицательной обратной связи увеличивает быстродействие звена. Инерционность положительной обратной связи, наоборот, затягивает переходной процесс.
Гибкие корректирующие обратные связи. Гибкие обратные связи содержат дифференцирующие звенья, и такие обратные связи действует только в динамике. Идеальная гибкая обратная связь (ГОС) представляет собой идеальное дифференцирующее звено
![]() . (3.15)
. (3.15)
Так как сигнал обратной связи пропорционален скорости изменения сигнала, такую обратную связь называют еще обратной связью по скорости.
Для звена с передаточной функцией
![]()
получаем
![]()
Таким
образом, гибкая обратная связь, не влияя
на коэффициент передачи охватываемого
звена, изменяет коэффициент при
![]() в знаменателе его передаточной функции.
Можно убедиться, что для апериодического
звена 1-го порядка положительная гибкая
ОС уменьшает постоянную времени, а
отрицательная, наоборот, увеличивает
ее. При этом в отличие от отрицательной
жесткой ОС применение положительной
гибкой ОС позволяет повышать быстродействие
без снижения коэффициента передачи
звена. Для звена 2-го порядка отрицательная
гибкая ОС увеличивая величину коэффициента
относительного демпфирования, является
эффективным средством уменьшения
колебательности рассматриваемого
звена.
в знаменателе его передаточной функции.
Можно убедиться, что для апериодического
звена 1-го порядка положительная гибкая
ОС уменьшает постоянную времени, а
отрицательная, наоборот, увеличивает
ее. При этом в отличие от отрицательной
жесткой ОС применение положительной
гибкой ОС позволяет повышать быстродействие
без снижения коэффициента передачи
звена. Для звена 2-го порядка отрицательная
гибкая ОС увеличивая величину коэффициента
относительного демпфирования, является
эффективным средством уменьшения
колебательности рассматриваемого
звена.
Для интегрирующего звена с передаточной функцией
![]()
имеем
![]() ,
,
где
![]() .
.
т.е. гибкая ОС изменяет коэффициент передачи, не изменяя типа звена.
Инерционность гибкой ОС сказывается на динамике охватываемого звена таким же образом, как и в случае жесткой обратной связи, т.е. при отрицательной обратной связи повышает быстродействие, а при положительной снижает его.
Благодаря простоте реализации инерционные ОС широко используются для повышения быстродействия (форсирования) переходных процессов. Особенно широкое распространение получила инерционная гибкая ОС вокруг интегрирующего звена, которая называется изодромной обратной связью (ИОС). В этом случае передаточная функция ОС имеет вид
![]() . (3.16)
. (3.16)
Действие
такой обратной связи в переходном
процессе, вызванном ступенчатым
воздействием на входе, можно пояснить
так. По теореме о начальном и конечном
значениях оригинала из теории
преобразования Лапласа известно, что
стремлению оригинала
![]() к нулю соответствует стремление
изображения
к нулю соответствует стремление
изображения![]() к бесконечности и, наоборот, стремление
оригинала
к бесконечности и, наоборот, стремление
оригинала![]() к бесконечности соответствует стремлению
изображения
к бесконечности соответствует стремлению
изображения![]() к нулю. Применим это положение к
передаточной функции изодромной обратной
связи.
к нулю. Применим это положение к
передаточной функции изодромной обратной
связи.
В
начале переходного процесса при
![]() скорость изменения переменных на входе
и выходе звена велика, следовательно,
скорость изменения переменных на входе
и выходе звена велика, следовательно,![]() .
Единицей в знаменателе
.
Единицей в знаменателе![]() можно пренебречь, т.е. принять
можно пренебречь, т.е. принять![]() .
Поэтому в начале переходного процесса
изодром-ная обратная связь ведет себя
как жесткая обратная связь, превращая
интегрирующее звено в статическое. В
результате облегчаются условия
стабилизации САУ в целом и возникает
возможность повысить быстродействие
системы в начале переходного процесса.
.
Поэтому в начале переходного процесса
изодром-ная обратная связь ведет себя
как жесткая обратная связь, превращая
интегрирующее звено в статическое. В
результате облегчаются условия
стабилизации САУ в целом и возникает
возможность повысить быстродействие
системы в начале переходного процесса.
В
конце переходного процесса
![]() ,
скорость изменения выходного сигнала
в системе уменьшается, при этом
,
скорость изменения выходного сигнала
в системе уменьшается, при этом![]() .
Следовательно,
.
Следовательно,![]() и сигнал обратной связи
и сигнал обратной связи![]() спадает до нуля. Интегрирующее звено
начинает вести себя как звено без
обратной связи, обеспечивая астатизм
САУ в целом, т.е. устраняя установившуюся
погрешность.
спадает до нуля. Интегрирующее звено
начинает вести себя как звено без
обратной связи, обеспечивая астатизм
САУ в целом, т.е. устраняя установившуюся
погрешность.
Системы с большим коэффициентом передачи. При проек-тировании систем автоматического управления получили применение так называемые системы с большим коэффициентом передачи. Они обладают рядом преимуществ по сравнению с другими САУ. Например, свойства системы в основном определяются статическими и динамическими свойствами цепи обратной связи.
Рассмотрим
пропорциональное звено с большим
коэффициентом передачи
![]() ,
охваченное обратной связью. В этом
случае имеем, что
,
охваченное обратной связью. В этом
случае имеем, что
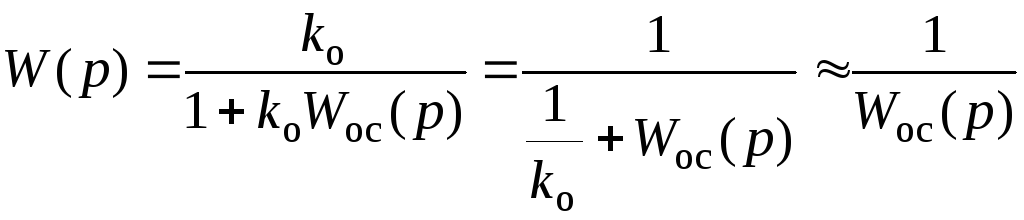 , (3.17)
, (3.17)
так
как
![]() .
.
Таким образом, с помощью практически безынерционного усилителя можно получить звено с передаточной функцией, обратной передаточной функции звена обратной связи. В этом случае свойства системы определяются характеристиками звена обратной связи.
При
этом свойства участка прямой цепи
![]() ,
охваченного параллельным корректирующим
устройством, и их изменения в процессе
действия системы не влияют на ее свойства.
,
охваченного параллельным корректирующим
устройством, и их изменения в процессе
действия системы не влияют на ее свойства.
Это также дает возможность создания физически труднореализуемых передаточных функций с помощью более простых обратных им передаточных функций. Такой способ широко применяется в автоматике и аналоговом моделировании.