

2.3. Задание
1. Изучить основные определения, необходимые и достаточные условия, критерии устойчивости линейных систем.
2. По заданной структурной схеме определить передаточную функцию замкнутой системы. Определить область устойчивости методом D-разбиения.
3. Провести моделирование заданной линейной системы. Используя алгебраические и частотные критерии устойчивости, определить устойчивость и запасы устойчивости.
2.4. Описание лабораторной установки
Лабораторной установкой является ЦВМ IBM PC для проведения цифрового моделирования.
Цифровое моделирование переходных процессов и частотных характеристик линейных систем автоматического управления производится с использованием пакетов Control и Simulink системы Matlab [6-8].
В этой работе исследуется влияние параметров системы автоматического управления на устойчивость и на показатели качества переходного процесса.
Для
исследования предлагается система
автоматического управления летательного
аппарата (ЛА) по углу крена
![]() ,
функциональная схема которой приведена
на рис. 2.7. Она состоит из измерительного
устройства – гировертикали (ГВ), которая
выдает сигнал
,
функциональная схема которой приведена
на рис. 2.7. Она состоит из измерительного
устройства – гировертикали (ГВ), которая
выдает сигнал![]() ,
пропорциональный углу крена
,
пропорциональный углу крена![]() .
При появлении отклонения от заданного
угла крена
.
При появлении отклонения от заданного
угла крена![]() :
:![]() усилитель (У) подает сигнал
усилитель (У) подает сигнал![]() на вход сервопривода (СП) элеронов.
Сервопривод поворачивает элероны
летательного аппарата (ЛА) на угол
на вход сервопривода (СП) элеронов.
Сервопривод поворачивает элероны
летательного аппарата (ЛА) на угол![]() так, чтобы скомпенсировать отклонение
угла крена
так, чтобы скомпенсировать отклонение
угла крена![]() от заданного угла крена
от заданного угла крена![]() .
При задании команды на изменение угла
крена
.
При задании команды на изменение угла
крена![]() ,
система управления изменит значение
угла крена ЛА так, чтобы отклонение
,
система управления изменит значение
угла крена ЛА так, чтобы отклонение![]() стремилось к нулю.
стремилось к нулю.
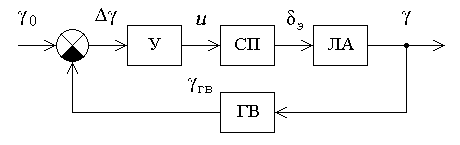
Рис. 2.7. Функциональная схема САУ углом крена ЛА
Звенья системы управления описываются следующими уравнениями:
1.
Измерительное устройство – гировертикаль![]()
![]() ; (2.11)
; (2.11)
2. Усилитель
![]() ; (2.12)
; (2.12)
3. Сервопривод
![]() ; (2.13)
; (2.13)
4. Летательный аппарат
![]() . (2.14)
. (2.14)
Параметры звеньев системы приведены в таблице.
|
Вариант |
|
|
|
|
|
|
1 |
1 |
4 |
5 |
0,1 |
1 |
|
2 |
1 |
2 |
4 |
0,2 |
1,2 |
|
3 |
1 |
1 |
3 |
0,3 |
1,4 |
|
4 |
1 |
0,5 |
2 |
0,4 |
1,6 |
|
5 |
1 |
0,25 |
1 |
0,5 |
1,8 |
В
таблице даны значения всех параметров
звеньев, кроме коэффициента передачи
вычислителя
![]() .
Надо выбрать коэффициент передачи
вычислителя
.
Надо выбрать коэффициент передачи
вычислителя![]() из условия устойчивости замкнутой
системы.
из условия устойчивости замкнутой
системы.
Пример программы моделирования данной системы в пакете Control системы Matlab для случая единичных параметров звеньев приведен в приложении 2.
Схема моделирования системы с использованием пакета Simulink системы Matlab для случая единичных параметров звеньев приведена на рис. 2.8.
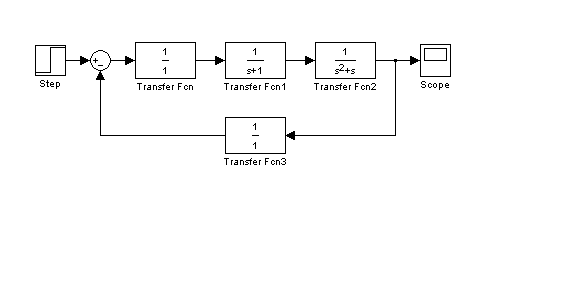
Рис. 2.8. Схема моделирования САУ углом крена ЛА
Параметры летательного аппарата задаются с помощью блока Transfer Fcn2, параметры сервопривода – с помощью блока Transfer Fcn1, параметры усилителя – с помощью блока Transfer Fcn, параметры гировертикали – с помощью блока Transfer Fcn3.
Входным сигналом
САУ является единичное ступенчатое
изме-нение
![]() –
блок Step.
На выходе схемы
с помощью блока Scope
наблюдается переходной процесс по
выходной координате системы
–
блок Step.
На выходе схемы
с помощью блока Scope
наблюдается переходной процесс по
выходной координате системы
![]() .
.