

Программа моделирования сау углом крена ла в пакете Control
W1=tf([1],[1])
Transfer function:
1
W2=tf([1],[1])
Transfer function:
1
W3=tf([1],[1 1])
Transfer function:
1
-----
s + 1
W4=tf([1],[1 1 0])
Transfer function:
1
-------
s^2 + s
WP=W2*W3*W4
Transfer function:
1
---------------
s^3 + 2 s^2 + s
WOS=W1
Transfer function:
1
WR=W1*W2*W3*W4
Transfer function:
1
---------------
s^3 + 2 s^2 + s
WZ=feedback(WP,WOS)
Transfer function:
1
-------------------
s^3 + 2 s^2 + s + 1
ltiview
Приложение 3
Сау частотой вращения ротора гтд с астатическим гидроприводом и изодромной обратной связью
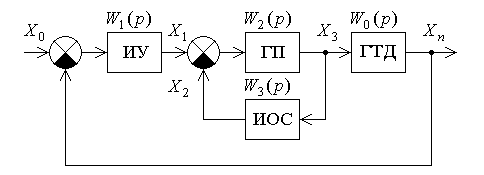
Рис. П3.1. Структурная схема САУ частотой вращения ротора ГТД
Передаточные функции звеньев САУ имеют вид:
измерительное устройство (ИУ)
![]() ;
;
гидропривод (ГП)
![]() ;
;
изодромная обратная связь (ИОС)
![]() ;
;
газотурбинный двигатель (ГТД)
![]() .
.
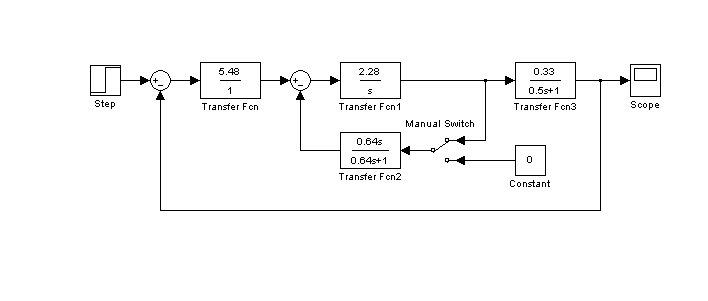
Рис. П3.2. Схема моделирования САУ частотой вращения ротора ГТД