

книги из ГПНТБ / Каргу Л.И. Системы угловой стабилизации космических аппаратов
.pdfЛинеаризируя систему уравнений (4.79), получим
/гЪ + с.{Ъ-а) = М,; |
|
/ н а + Я р - с а ( » - а ) = 0 ; |
(4.82) |
где I h = |
I3+IKZ- |
Исключив из этой системы координату а, можно пе рейти от системы трех уравнений к системе двух урав-
|
і |
|
1 |
) |
' |
I |
s> |
|
Рис. 4.29. Структурная схема си |
||
|
|
|
|
|
|
|
стемы с ГИО при наличии упру |
|
|
|
гой податливости в элементах кон |
I7s'*cc |
|
|
струкции гироскопа |
P |
і |
|
|
|
77^ |
|
|
нений, которая в форме преобразования Лапласа при нулевых начальных условиях будет иметь вид
VJzs* + (/H+Iz)ca]s4(s) |
+ Hs?(s)=Mz(s); |
} |
|
ITs4(s)-H(/zs* |
+ ca)sb(s\=Mm{s). |
і |
|
Структурная схема упругой системы с гироскопиче скими исполнительными органами приведена на рис. 4.29. Из этой структурной схемы можно получить выражение передаточных функций замкнутой системы. Передаточ ная функция по управляющему воздействию определяет ся выражением
= |
W + ( / , + /„) с. |
( 4 8 4 ) |
а передаточная функция по возмущающему воздейст вию —
<М«)=
4s)
Mz(s)
(4.85)
Знаменатель этих функций можно представить в виде произведения двух сомножителей вида ( S 2 + C0i2 ) ( S 2 + G ) 2 2 ) , где o)j,2 — постоянные числа, выражаемые через коэффи циенты биквадратного полинома. Таким образом,переда точная функция упругой системы представляет собой пе редаточную функцию двух последовательно соединенных консервативных звеньев. Если учесть вязкое трение в упругих элементах конструкции гироскопа, то эти пере даточные функции примут вид, соотгаетсивущий переда точной функции колебательного звена.
Характеристический определитель упругой системы имеет вид
|
A |
= p*(a0p* + alP* + a2), |
(4.86) |
|
где a0 = IJJz; |
a 1 |
= / , ( / r |
r . + //a J + c«/ r / H ; |
|
|
|
аг |
= са.Н*. |
|
Характеристическое уравнение системы
а о / ? 4 + |
Яі/7 2 + а 2 = 0 |
(4.87) |
позволяет определить |
собственные частоты |
механиче |
ской системы КА — ГИО:
Для упругой системы стабилизации характерна не од на частота собственных (нутационных) колебаний, как это имело место у абсолютно жестких систем, а две часто ты. Следует заметить, что в общем случае при рассмот рении такой механической системы, как системы упругих тел с распределенными параметрами, возможно бесчис ленное множество значений собственных частот.
Определим предельные значения частот сої и (о2 при са—>-оо. Из выражения (4.88) находим
Нт < Я 2 „ ' А
Н т о)22 = оо.
Найденные предельные значения частот показывают, что первая частота с увеличением жесткости приближа ется к частоте нутационных колебаний, вторая — стре мится к бесконечности.
Решая систему (4.82) при нулевых начальных усло виях, выражение для $(t) представим в виде
Ці)= |
f a 2 " V " |
|
K s i n ^ - № 2 s i n c V ) |
+ |
|
|
а0 (cojZ — ш 2 2 ) |
|
|
|
|
' |
(«о2 — ш2 2 ) <0іШ2 |
-(соА |
sin w2t — o)2 sin w^). |
(4. 89) |
|
а0 |
|
|
|
||
Гироскопический |
момент, |
вызывающий |
разворот |
||
КА по углу тангажа, как и для абсолютно |
жесткого ги |
роскопа, равен |
|
MT.y = HXf>{t). |
(4.90) |
Поэтому для оценки влияния упругости достаточно срав
нить выражения |
(4.90) |
и (4.29), |
умножив |
последнее на |
||
1/2: |
|
|
|
|
|
|
|
|
со |
со1 |
s i n (A^t — оо2 |
s ' n m 2 ^ і |
|
.УИг |
((OJ2 |
— co2 2 ) |
|
s i n at |
|
|
(Iz + Лі) Са<«> |
Ш і |
s i n u,2t — щ2 s i n coj t |
(4. 9 Г |
|||
|
|
|
|
|
|
|
s i n 10^
Полагая ач — со, a>i<Ca>2 и учитывая, что по энергети ческим соображениям высокочастотные упругие колеба ния с частотой <х>2 при наличии внутреннего трения в эле ментах конструкции ГИО быстро затухают, выражение (4.91) можно заменить приближенной оценкой
|
^ |
|
сою! |
s i n с о ^ |
Uг + ^н) са |
s i n с о ^ |
^ |
|
|
У |
|
й)2 2 |
s i n u>t |
ігг/нь>22 |
s |
' n ш * |
|
|
|
Uz + |
^н) C a |
со2 |
|
|
|
, , Q O S |
или |
/ г у |
~ — — — |
- . |
|
|
|
(4.93) |
|
|
|
V H » 2 2 |
">22 |
|
|
|
|
|
Так |
как |
-^-<<^ 1, а r a велико, то |
|
|
|
|||
|
|
а>22 |
|
2 ( / г + / „ ) с / Г |
|
|
|
|
/Zv ^ |
|
|
|
|
|
|
||
/гСа (/ , + |
/„) + |
/ г Я 2 + { [/ г с а (7г + / н ) + |
/ г Я2]2 |
- |
||||
|
|
|
|
2 (/* + |
/„) с а / Г |
|
|
(4. 94) |
|
|
|
|
|
|
|
|
|
- 4 / r / H / ^ 2 C J V 2
Если са—*оо, то % = 1 , т. е., когда упругая |
система |
становится абсолютно жесткой, потери в передаче |
момен- |
та нет. При конечном значении жесткости сл, как это следует из выражения (4.94), % всегда меньше единицы.
В работе [25] физическую природу ослабления уси ления момента объясняют тем, что рамка гироскопа становится как бы более инерционной. Возможно и дру гое объяснение этого явления. Наличие упругой подат ливости кожуха и ротора в плоскости действия пары сил, возникающих в результате прецессии двухстепенного ги роскопа, превращает двухстепенной гироскоп в диапазо не углов упругих деформаций в трехстепенной. Это озна чает, что кожух гироскопа, приобретая дополнительную, хотя и ограниченную степень свободы, становится внут ренней рамкой трехстепенного гироскопа, в результате чего получает дополнительную сопротивляемость пере дачи М д м корпусу КА. Если для абсолютно жесткого гироскопа действие момента М д м равносильно его раз вороту как обычного твердого тела, то для упругого гироскопа характерна потеря части мощности момента из-за действия гироскопических сил. Эта часть мощности датчика момента бесполезно тратится, превращаясь в тепловую энергию из-за внутреннего трения (в упругих элементах конструкции гироскопа.
Если на КА действует /W2 = const, то из системы урав нений (4.82) находим
ст |
о < |
|
ад(і>і4»2' |
ИЛИ С уЧЄТОМ ЗНаЧЄНИЙ « Ц 2 И (022 |
|
|
(4.96) |
Сравнивая это выражение с выражением (4.15), мож |
|
но сделать вывод о |
том, что упругая податливость ги |
роскопа приводит к увеличению статической ошибки на
величину Мг/са. |
(При сравнении |
учитывается, что jx = 0 |
||
и ГИО неспаренные.) |
|
|
||
Как |
пример приведем описание |
двухстепенного ги |
||
роскопа, |
который использовался |
в |
качестве опытного |
|
образца |
[25]. |
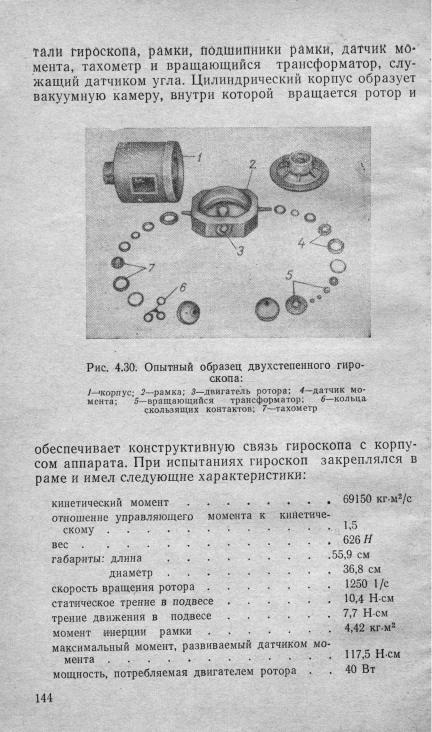
Этот гироскоп относится ж классу круп |
||
ногабаритных двухстепенных гироскопов с высоким отношением управляющего момента к кинетическому (рис. 4.30). В цилиндре установлены вращающиеся де-
Для выявления ниболее важных источников упругой податливости был проведен анализ конструкции рамки и связанных с ней элементов. При анализе предполага лось, что вся масса ротора сосредоточена в ободе и что кинетическим моментом диафрагмы ротора и вала мож но пренебречь. Таким образом, расчетная податливость рассматривалась как сумма податливостей между обо дом ротора и осью прецессии гироскопа.
Элементы, определяющие общую податливость, их жесткости и относительные величины податливости при ведены в табл. 4.2.
|
|
|
|
|
|
Таблица 4.2 |
|
|
|
|
|
Жесткость |
Относитель |
||
Элемент |
гироскопа |
ная подат |
|||||
108 н. см/рад |
ливость |
||||||
|
|
|
|
||||
|
|
|
|
|
|
% |
|
Диафрагма |
ротора |
(сі) |
4,79 |
|
10 |
||
Вал ротора |
(с2 ) |
|
|
3,18 |
|
14 |
|
Подшипники ротора (с3 ) |
2,21 |
|
21 |
||||
Рамка (с4 ) |
|
|
|
0,87 |
|
52 |
|
Подшипники рамки (с5 ) |
15,9 |
|
3 |
||||
Суммарная |
жесткость |
определяется из |
соотношения |
||||
f s = |
|
£і£2£з£4£5 |
=4,52-107 Н-м/рад. |
(4. 97) |
|||
|
с1 + |
с2 |
+ ... + с 4 |
|
|
|
|
Распределение жесткостей отдельных элементов по казывает, что рамка и все элементы внутри нее сущест венно влияют на общую податливость. Наиболее важен вклад податливости подшипников ротора гироскопа. Эта податливость является функцией натяга и поэтому зави сит от массы ротора и радиальной нагрузки, обусловлен ной угловой скоростью рамки. Податливость подшипни ков ротора представляет собой существенно нелинейную функцию осевого натяга, особенно в области малых уг ловых скоростей рамки.
6 1981
Глава 5
АКТИВНЫЕ СИСТЕМЫ УГЛОВОЙ СТАБИЛИЗАЦИИ С РЕАКТИВНЫМИ СОПЛАМИ
5. 1. Принципы построения систем угловой
стабилизации с реактивными соплами
В основу работы систем с реактивными соплами [1] положен принцип создания управляющих моментов при помощи реактивных сопел.
Реактивные сопла, удаленные на некоторое расстоя ние от центра масс космического аппарата, создают силу тяги за счет выделения из них рабочего тела. Возникаю
щая при этом реактивная сила обусловливает |
появление |
управляющего момента МУ=Р1, где Р — сила |
тяги; I — |
плечо. Включение сопел, продолжительность |
действия |
тяги и ее направление определяются законом управле ния замкнутой системы автоматического регулирования. Исходной информацией системы, обеспечивающей фор мирование требуемого закона управления, служат пока зания чувствительных элементов, например ИКВ, ГО
иДУС.
Вреактивных соплах в качестве рабочего тела ис пользуют хранящийся в специальных баллонах предвари тельно сжатый газ. Возможен вариант, когда реактив ные сопла являются составной частью малогабаритных двигательных установок малой тяги, работающих на про дуктах сгорания химического топлива. В этом случае рассматриваемые исполнительные органы правильнее называть реактивными двигателями.
Реактивные сопла управляются электромагнитными пневмоклапанами (ЭПК), к которым по трубопроводам подводится сжатый газ от редукционной камеры, под ключенной к газовому баллону.
Блок-схема трехканальной системы угловой стабили зации с реактивными соплами приведена на рис. 5.1.
Так как одним соплом можно создать реактивную тягу только в одном направлении, то на каждый канал систе мы необходимо предусмотреть как минимум два сопла.
Известно, что главный недостаток систем с реактив ными соплами заключается в сравнительно быстром расходе рабочего тела, поэтому в настоящее время ве дутся разработки новых типов двигательных установок, обеспечивающих при ничтожно малом секундном расходе массы большие скорости истечения [1]. К таким установ кам относятся ядерные, электродуговые, ионные и магни- то-плазменные двигатели.
Рис. 5.1. |
Блок-схема трехка- |
|
нальной |
системы угловой |
ста |
билизации с реактивными |
соп |
|
|
лами |
|
Системы с реактивными соплами могут строиться по линейному и нелинейному законам. Ранее было сказано, что использование линейных законов управления в по добных системах приведет к недопустимо большому рас ходу рабочего тела, поэтому в космических условиях системы с пропорциональным управлением реактивных сопел не находят практического применения.
Релейные системы наиболее просты в производстве и надежны в эксплуатации, так как по сравнению с дру гими исполнительными органами они имеют минималь ное число элементов. Установившийся режим релейных систем является автоколебательным. При их проектиро вании очень важно выбрать так частоту и амплитуду автоколебаний, чтобы оптимально удовлетворить требо ваниям точности и энергопотребления.
Параметры установившегося предельного цикла прежде всего зависят от характеристик чувствительных элементов, а также от возмущений, действующих на ап парат. Расход рабочего тела непосредственно зависит от параметров автоколебаний и режима работы сопел. Обычно в качестве чувствительных элементов релейных
6* |
147 |
систем используются датчики углового положения и ги роскопические датчики угловой скорости.
В системах управления космических аппаратов с большим сроком активной жизни нежелательно исполь зовать датчики угловой скорости из-за большого потреб ления ими электроэнергии и малого ресурса работы. Применение в качестве чувствительных элементов толь
ко датчиков углового положения позволяет |
принципи |
||||||||
|
ально |
упростить систему |
|
управ |
|||||
|
ления и повысить ее надежность. |
||||||||
|
Возможны |
различные |
варианты |
||||||
|
систем |
без |
датчиков |
угловой |
|||||
|
скорости. В работе [5] предложен |
||||||||
/7 |
метод |
обеспечения |
длительной |
||||||
ориентации аппарата |
использова |
||||||||
|
|||||||||
|
нием |
датчика |
углового |
положе |
|||||
|
ния, |
имеющего релейную |
|
харак |
|||||
Рис. 5.2. Характеристика |
теристику |
с |
гистерезисом |
(рис. |
|||||
датчика углового положе |
5.2). |
|
Такой |
датчик |
позволяет |
||||
ния |
обеспечить |
демпфирование |
коле |
||||||
|
баний аппарата в течение пере |
||||||||
ходного процесса и поддержание |
устойчивой |
ориентации |
|||||||
вустановившемся режиме.
Врелейных системах'стабилизации расход газа в предельном цикле пропорционален создаваемому уско
рению, которое, в свою очередь, пропорционально тяге. В тех случаях, когда сопла двигательной системы ори ентации рассчитываются по максимальному значению тяги, обычно наблюдается чрезмерное потребление рабо чего тела. Для уменьшения расхода используют каскад ную систему сопел с различными уровнями тяги.
Более простой способ минимизации |
расхода |
энер |
гии — это использование импульсного |
режима |
работы |
сопел. При этом оказывается, что техническая реализа ция системы с модуляцией тяги становится лишь незна чительно сложнее, чем обычный релейной системы.
5. 2. Основные режимы работы релейных систем
Рассмотрим работу канала тангажа системы с реак тивными соплами, в качестве чувствительных элементов которой используются инфракрасная вертикаль и датчик угловой скорости с релейными характеристиками, при*
веденными на рис. 1. 11. Вначале будем считать, что ре активные сопла работают без запаздывания, а возмуща ющие моменты отсутствуют. В соответствии с законом управления
|
|
|
|
|
— 1 при & > $ х |
; |
& > — |
|
|
|
|||
|
|
Ф(8, ») = |
|
О при |
Щ<\Ц; |
№<\К\; |
|
(5.1) |
|||||
|
|
|
|
|
+ |
1 при d < — |
ftjj Ь < bj_ |
|
|
||||
и статическими |
характеристиками |
|
чувствительных |
эле |
|||||||||
ментов |
на рис. 5.3 |
изображены |
линии |
переключения |
|||||||||
сопел. |
|
|
|
|
|
|
|
|
|
|
|
||
|
В |
общем |
случае си |
|
|
|
|
|
|
||||
стема управления должна |
|
|
|
|
|
|
|||||||
погасить |
первоначальное |
|
|
|
|
|
|
||||||
возмущенное |
движение, |
|
|
|
|
|
|
||||||
начало |
которого |
на фазо |
|
|
|
|
|
|
|||||
вой |
плоскости |
опреде |
|
|
|
|
|
|
|||||
ляется точкой J (—f}0 , Фо) , |
|
|
|
|
|
|
|||||||
а затем |
ввести |
аппарат |
|
|
|
|
|
|
|||||
в режим предельного цик |
|
|
|
|
|
|
|||||||
ла |
( режим |
автоколеба |
|
|
|
|
|
|
|||||
ний) . |
|
|
|
|
|
|
|
|
|
|
|
||
|
Используя |
|
материал, |
Рис. 5.3. Фазовый портрет си |
|||||||||
приведенный |
в разд. 3.3, |
||||||||||||
стемы |
при релейных характе |
||||||||||||
убеждаемся |
в |
том, что |
ристиках чувствительных |
эле- |
|||||||||
изображающая |
точка на |
|
|
ментов |
|
|
|||||||
отрезке |
/—2 |
будет |
дви |
|
|
|
|
|
|
||||
гаться |
|
по прямой |
линии, |
параллельной |
оси |
абсцисс. |
|||||||
В точке 2 сопла |
включатся на гашение угловой скоро |
||||||||||||
сти Ь0 и движение до точки 3 будет |
происходить |
по па |
|||||||||||
раболе |
|
|
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
т > 2 _ т э 0 2 = |
_ 2 ^ у |
( д — ( 5 . 2 ) |
||||||
где |
Wy |
My |
|
|
|
|
|
|
|
|
|
||
= —- . |
|
|
|
|
|
|
|
||||||
'z
Точка 3 зеркально отобразится в точку 3', что соот ветствует переходу аппарата из положения г> = л в поло жение г> = —я. Начиная с точки 3', аппарат продолжит равномерное вращение в направлении линии переклю чения до точки 4. В точке 4 сопла включатся и угловая скорость аппарата вновь будет уменьшаться. Если дат-