Глава 4.
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ
ДИАЛОГОВЫЕ ЭЛЕКТРОМЕХАНИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ И ПРИБОРЫ
Измерительные
преобразователи (ИП) являются структурной
основой любого электро- и радиоизмерительного
прибора.
Аналоговые
электромеханические измерительные
преобразователи и приборы прямого
преобразования имеют очень широкое
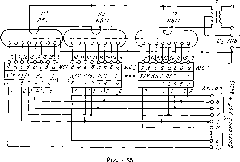
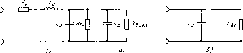
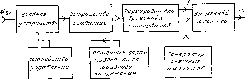
распространение. Структурная схема
электромеханического измерительного
прибора изображена на рис. 4.1. Она
включает электромеханический
измерительный преобразователь
(измерительный механизм — ИМ), отсчетное
устройство, измерительную цепь.
Электромеханический преобразователь
преобразует измеряемую электрическую
величину (ток, напряжение) в механическую
(перемещение подвижной части
механизма, обычно угловое), т. е. доступ-
^изм
Кзмерителз - нся u,eni
Змея/промеха ни чес- кий нреорразо- —>
За/773/73
Отсчетное
устройстЗо
Рис. 4.1
ную
для восприятия орланами чувств человека.
Отсчетое устройство предназначено
для отсчитывания значения перемещения
подвижной части преобразователя и
значения входной величины. Оно состоит
из указателя, жестко связанного с
подвижной частью измерительного
механизма, и неподвижной шкалы. Шкала
представляет собой совокупность
отметок, которые расположены вдоль
определенной линии и изображают
последовательность чисел, соответствующих
значениям измеряемой величины.
Измерительная цепь электромеханического
измерительного прибора представляет
собой обычно масштабный ИП (делитель,
шунт, трансформатор и т. п.). Использование
в качестве измерительной цепи
преобразователей рода величины
(термоэлектрического, выпрямительного
и др.) изменяет название прибора по типу
примененного первичного преобразователя.
ИП
вместе с отсчетными устройствами
выпускаются промышленностью часто
без специальной измерительной цепи и
широко используются как самостоятельные
приборы для измерения тока, напряжения,
мощности и т. д., а также в качестве
аналоговых выходных преобразователей
сложных электрорадиоизмерительных
приборов.
Общие
сведения об электроизмерительных
механизмах. Электроизмерительный
механизм в самом общем плане состоит
из подвижной части и неподвижной.
Обычно подвижная часть может вращаться
относительно неподвижной оси. Положение
подвижной части относительно неподвижной
определяется одной координатой—
углом поворота, т. е. это система с одной
степенью свободы. Угол поворота
несет информацию об измеряемой величине.
Движение подвижной части механизма
описывается дифференциальным
уравнением, которое может быть записано
на основе второго закона Ньютона для
вращающихся тел:

(4.1)
где
J
—
момент инерции подвижной части
относительно оси вращения; а — угол
поворота подвижной части; Mi
—
механические моменты, действующие на
подвижную часть.
Какие
механические моменты должны действовать
на подвижную часть для обеспечения
функционирования измерительного
механизма? Перемещение подвижной
части должно проходить с зат
ратой
определенной работы на преодоление
трения и на изменение запаса потенциальной
энергии измерительного механизма.
Поэтому
в каждом измерительном механизме
должен, прежде всего, создаваться
вращающий момент и совершаться работа
за счет энергии электромагнитного
поля, связанной с измеряемой величиной.
В зависимости от характера явления,
используемого для создания вращающего
момента, различают следующие системы
измерительных механизмов и приборов:магнитоэлектрическая,
электродинамическая, электростатическая,
электромагнитная, индукционная.
Стандартом
установлены условные обозначения
систем измерительных механизмов,
которые наносятся на шкалы измерительных
приборов (см. табл. 5 Приложения).
Из
курса физики известно, что вращающий
момент, действующий на подвижную
систему, с точностью до знака определяется
производной от энергии магнитного или
электрического полей по углу отклонения
подвижной части:
Map^dW/da, (4.2)
где
W
—
энергия магнитного поля системы контуров
с токами или энергия электрического
поля системы заряженных тел.
В
общем случае вращающий момент может
быть записан как функция углового
положения а и измеряемой величины Q:
Мвр
= =
kf(a)
Qn,
где
п=
1, 2, k
—
коэффициент пропорциональности. Так,
в магнитоэлектрическом приборе вращающий
момент не зависит от а,
а п
=
1; в электродинамическом, электромагнитном,
электростатическом имеется зависимость
от а, а п
=
2.
Бели
на подвижную часть будет действовать
только вращающий момент, то она
повернется на полный угол (до упора)
независимо от значения вращающего
момента и измеряемой величины. Между
тем каждому значению измеряемой величины
должно соответствовать одно, вполне
определенное значение угла отклонения
подвижной части. Для этого на подвижную
часть механизма должен действовать
второй момент, направленный против
вращающего момента, который бы
изменялся с отклонением подвижной
части и уравновешивал вращающий момент.
Это так называемый противодействующий
момент.
В большинстве современных измерительных
механизмов противодействующий момент
создается при помощи плоских
спиральных пружинок, изготавливаемых
из специальной бронзы. В некоторых
механизмах противодействующий
момент создается растяжками или
подвесами, на которых крепится
подвижная часть.
Противодействующий
момент пропорционален углу закручивания
а:
МпР
=
—kMa,
где
kM
—
удельный противодействующий момент
(момент, возникающий при закручивании
пружины на угол в один радиан). Знак
«минус» в выражении для противодействующего
момента обусловлен тем, что он всегда
направлен против
вращающего момента, направление которого принято за положительное.
Шкала
В
настоящее время большое распространение
получили механизмы, в которых
противодействующий момент создается
электрически — таким же способом,
как и вращающий. Такие механизмы и
приборы называют логометрами,
они обладают большими измерительными
возможностями по сравнению с механизмами
с механически создаваемым
противодействующим моментом,
например позволяют измерять отношение
величин.
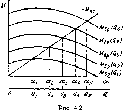
Следует
заметить, что угловое отклонение в
установившемся режиме определяется
только моментами Мвр
и Мпр.
На рис.
показан график установившихся углов отклонения а в зависимости от измеряемой величины и вращающего моментаM(Q).Здесь же показана шкала значений измеряемой величины.
Чтобы
движение подвижной части было
апериодическим, плавным, удобным
для снятия показаний, предусматривается
действие на подвижную часть момента
успокоения.
Момент успокоения создается
специальным устройством — успокоителем
(демпфером), который строится так, чтобы
в нем возникал момент только при движении
подвижной части и всегда в направлении,
противоположном направлению движения.
Следовательно, момент успокоения
должен быть связан со скоростью движения,
а не с углом отклонения. Такой момент
успокоения, действуя в процессе движения
и успокаивая колебания подвижной части,
не отразится на величине установившегося
отклонения.
В
большинстве случаев момент успокоения
пропорционален угловой скорости Муса
= Gda/dt,
где
G
—
коэффициент успокоения. При реализации
механизма неизбежно сталкиваются с
моментом, действующим на подвижную
часть всегда в сторону, противоположную
движению — моментом
трения,
обусловленным трением между осью и
опорой. Момент трения Л4тр
зависит от качества материалов и
обработки поверхности оси и опорного
камня, загрязненности поверхностей,
радиусов закругления, массы подвижной
части, влажности и многих других
факторов. Поэтому о величине момента
трення можно судить лишь приблизительно.
Чаще всего стремятся оценить наибольшее
его значение. Трение проявляется в
наличии вариации показаний — неодинаковых
показаниях прибора при установке
измеряемой величины снизу и сверху.
Подставляя
в (4.1) выражения для моментов Мвр,
Мпр,
Мусп,
учитывая, что момент трения есть величина
случайная и его наибольшее значение
значительно меньше других моментов,
получаем уравнение движения подвижной
части механизма:
J
+G а
= МвР
№ «)• (4-3)
dtz dt
Таким
образом, уравнение движения подвижной
части измерительного механизма
представляет собой дифференциальное
уравнение 2-го порядка с постоянными
коэффициентами и правой частью. Изучавшим
радиотехнику знакомы способы решения
такого уравнения. Оно описывает
процессы в колебательном контуре.
Отметим, что в электроизмерительных
механизмах, применяемых для измерения
тока, напряжения, мощности, обычно
используется апериодический режим
движения подвижной системы, что
обеспечивается следующим соотношением
между параметрами механизма: (G2/4/2)
^kj]
=
азг0,
где шо — собственная частота свободных
механических колебаний подвижной
части.
Общие конструктивные узлы измерительных механизмов (ИМ) и приборов. Рассмотрим способы установки подвижной части ИМ. Различают три способа обеспечения вращения подвижной части ИМ: установка на осях, крепление иа растяжках и на подвесе.
При установке на осях, представляющих собой стальную проволоку диаметром 0,3... 1,5 мм с заостренными и зашлифованными концами (кернами), последние располагаются в опорах-подпятниках, на самом конце кери закругляется. Иногда ось представляет собой тонкую трубку с кернами на концах. Конструктивно установка подвижной части на кернах осуществляется различными способами. Очень часто к подвижной части механизма с обмоткой вместо цельной оси прикрепляют две буксы, в которые вставляют относительно короткие, заостренные полуоси, заканчивающиеся кернами. Подпятники делают из твердых сортов камня (агат, корунд, рубин). Несмотря на малую массу подвижной части прибора, обычно составляющий несколько граммов, механические напряжения в материалах керна и подпятника вследствие небольшой их площади соприкосновения достигают огромных величин, нигде в машиностроении не принятых.
Существенным недостатком установки подвижной части на кернах является наличие момента трения, вносящего погрешности в ^показания прибора.
В последние годы получили распространение измерительные механизмы с установкой подвижной части на растяжках. Растяжки представляют собой тонкие ленточки из оловянно-цинковой фосфористой, кадмиевой или бериллиевой бронзы, на которых подвешивается подвижная часть. Растяжки, закрепленные на пружинах, образуют ось вращения и создают противодействующий момент. В качестве указателя на подвижной части устанавливается стрелка или зеркальце. В особо чувствительных механизмах (гальванометрах) подвижная часть устанавливается на подвесе, т. е. подвешивается иа тонкой бронзовой ленте.
В механизмах, использующих растяжки или подвес, трение практически отсутствует, что позволяет создать очень чувствительные нли очень точные приборы. Кратко остановимся на отсчетном устройстве показывающего аналогового прибора, состоящем из указателя и шкалы.
Указатели делятся на стрелочные и световые. Стрелки показывающих приборов изготавливают из тонкого листового алюминия или алюминиевой трубочки. Световые указатели выполняются в виде оптических приспособлений, проецирующих световой луч с помощью подвижного и неподвижного зеркал на шкалу прибора. Световые указатели обладают важными преимуществами: прежде всего позволяют повысить чувствительность за счет того, что угол поворота отраженного луча вдвое больше угла поворота подвижного зеркальца, а также из-за того, что длину отраженного луча, от которой зависит перемещение указателя по шкале, можно сделать достаточно большой (1 ... 1,5 м). Кроме того, световой указатель не имеет погрешности от параллакса, т. е. получение разных отсчетов при неподвижной стрелке в зависимости от изменения точки наблюдения. В последние годы получили распространение узкопрофильные электромеханические измерительные приборы со световым указателем. Для уменьшения погрешности за счет параллакса в случае стрелочного указателя шкалу снабжают зеркалом, отсчет производится тогда, когда стрелка и ее изображение в зеркале совпадают. Шкала наносится на циферблате прибора и представляет собой, как отмечалось, совокупность отметок, изображающих ряд последовательных чисел, соответствующих значениям измеряемой величины. Расстояние между двумя соседними отметками называется делением шкалы, а изменение измеряемой величины, вызывающее перемещение указателя на одно деление, — ценой деления. Цена деления обычно выбирается из условия: £>>Д, где Д — суммарная погрешность прибора. У многих приборов D=2A или D = 4Д. Кроме того, цена деления должна определяться по формуле D=A/n=k- 10г, где А — предел измерения по шкале, п — число делений шкалы, k=\, 2, 5; г — любое целое число или нуль. Шкалы могут быть равномерными и неравномерными. Это зависит от системы измерительного механизма. Предпочтительной является равномерная шкала, по которой отсчет производится точнее. На циферблате прибора, кроме шкалы наносятся условные обозначения в соответствии с ГОСТ 23217—78.
Для достаточно быстрого успокоения колебании подвижной части почти все показывающие приборы непосредственной оценки снабжаются успокоителями. Применяются воздушные я магнитоиндукционные успокоители.
Воздушные успокоители применяют двух типов: поршневые и крыльчатые. На оси подвижной части жестко укрепляются алюминиевое крылышко или поршенек, которые могут свободно перемещаться внутри закрытой камеры. При перемещении возникает сопротивление воздуха, быстро успокаивающее колебания подвижной части. Магнитоиндукционные успокоители состоят из постоянного магнита и элемента в виде алюминиевого сектора, диска, пластины, жестко связанного с осью подвижной части. При пересечении магнитного потока в нем индуктируются токи. Воздействие этих токов с магнитным полем постоянного магнита создает тормозящий успокаивающий момент.
Время успокоения оценивается количественно; за время успокоения применяется время с момента подачи измеряемой величины до момента, когда отличие показания прибора от установившегося не превысит 1 % от длины шкалы.
С осью подвижной части механически связывается корректор, необходимый для плавной установки стрелки на нулевую отметку шкалы у невключенного прибора. Корректор состоит из поводка я стержня, эксцентрически насаженного на винт. Поводок имеет вилку, захватывающую стержень. Когда винт, выведенный на корпус прибора, поворачивают в какую-либо сторону, тем самым перемещают вокруг оси поводок корректора и прикрепленный к нему конец спиральной противодействующей пружины, которая поворачивает ось вместе с укрепленной на ней стрелкой. Подвижная часть механизма требует тщательной балансировки. С этой целью иа оси укрепляются усики и грузики. Для удобства балансировки иа усиках и грузиках имеется резьба.
Уравнение
преобразования. Чувствительность.
Порог чувствительности. Вариация.
Выразим угловое отклонение в
установившемся режиме. Для этого в
(4.3) положим dza/dt2-=da/dt
=
0
и
разрешим его относительно а, т. е. a=(p(Q,
kM),
где
Q
—
измеряемая величина. Полученное
уравнение преобразования носит название
уравнения шкалы электромеханического
измерительного прибора.
Чувствительность
прибора выражается отношением
перемещения указателя к соответствующему
изменению измеряемой величины. В
общем случае неравномерной шкалы
чувствительность SQ
= daldQ
различна
в разных точках шкалы. Величина, обратная
чувствительности прибора, называется
постоянной прибора = 1 ISq.
Как
указывалось выше, шкала прибора
характеризуется ценой деления. Очевидно,
если чувствительность выражается
числом делений на единицу измеряемой
величины, то цена деления и постоянная
прибора совпадают. Чувствительность
прибора не следует смешивать с
порогом чувствительности прибора, под
которым понимается значение измеряемой
величины, равное абсолютной погрешности
прибора. Порог чувствительности
совпадает со значением разрешающей
способности. Очевидно, относительная
погрешность измерения величины, равной
порогу чувствительности, составляет
100%.
Для
показывающих электромеханических
измерительных приборов отдельно
нормируется случайная погрешность от
трения. Вводится величина: вариация
показаний в данной точке шкалы, которая
определяется экспериментально как
наибольшая по абсолютной величине
разность показаний при возрастающих
и убывающих значениях измеряемой
величины: Ь=]<2Измв—<2нзми|-
Вариация
показаний не должна превышать удвоенного
значения предела допускаемой
погрешности прибора.
МАГНИТОЭЛЕКТРИЧЕСКИЕ ИЗМЕРИТЕЛЬНЫЕ МЕХАНИЗМЫ И ПРИБОРЫ
Принцип
действия и устройство. Принцип работы
магнитоэлектрического измерительного
механизма состоит в использовании
механического взаимодействия катушки
с током (рамки) и поля постоянного
магнита. Конструктивно они выполняются
с подвижной катушкой и подвижным
магнитом. В свою очередь система с
подвижной катушкой имеет конструкции
с внешним магнитом и с внутренним
магнитом. Наибольшее распространение
получили магнитоэлектрические ИМ с
внешним по отношению к катушке магнитом.
Его конструкция показана на рис. 4.3.

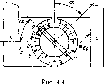
Магнитная
цепь образуется постоянным магнитом
1,
магнито- проводом 2
с полюсными наконечниками 3
и цилиндрическим сердечником 4.
Постоянный магнит изготавливается из
высококоэрцитивной стали. Форма
магнита в виде сравнительно короткого
бруска удобна для применения материалов
с высокой энергией типа
железо-никель-алюминиевых сплавов,
трудно поддающихся механической
обработке. Полюсные наконечники и
сердечник выполняют из магнитомягких
материалов. Равномерный кольцевой
зазор между двумя цилиндрически ми
поверхностями, образованными
полюсными наконечниками и сердечником,
составляет примерно 2 мм и обеспечивает
возможность создания в зазоре очень
сильного равномерного радиального
магнитного поля с магнитной индукцией
6 = 0,2... 0,4 Тл.
В
воздушном зазоре между сердечником и
полюсными наконечниками размещается
подвижная прямоугольная рамка 5,
свободно охватывающая сердечник.
Рамка изготавливается обычно из
алюминиевого каркаса, на который
намотана изолированная медная или
алюминиевая проволока диаметрам 0,03...
0,2 мм. Алюминиевый каркас обеспечивает
необходимую жесткость рамки и выполняет
роль успокоителя, поскольку при повороте
катушки в каркасе индуцируется ЭДС и
возникает вихревой ток, препятствующий
движению рамки. Рамка устанавливается
на полуосях. Керны полуосей опираются
на подпятники 6,
связанные с корпусом прибора. На
одной из полуосей укреплена стрелка
7, которая уравновешивается грузиками
8,
9,
укрепленными на усиках. Для создания
противодействующего момента используются
две спиральные пружины 10,
которые одновременно служат для подвода
тока к рамке.
Внутренние
концы спиральных пружинок крепятся к
пружино- держателю рамки, наружный
конец одной пружинки прикреплен к
неподвижной
части прибора, а другой —к поводку
корректора.
Уравнение
преобразования. Выведем
уравнение преобразования ■a=(p(Q,
&„).
При протекании тока по проводу катушки
рамки на последний будет действовать
сила, направление которой можно
■определить по правилу правой руки.
На рис. 4.4 изображена катушка, состоящая
из одного витка, показаны направления
тока I,
магнитного
поля В
и сил F,
образующих
вращающий момент Мвр.
Вращающий момент может быть получен
из общего уравнения
, если выразить энергию катушки с током в магнитном поле. Энергия выражается формулой:
W=^In + LP/2, (4.4)
где
I
— ток через катушку, ф —магнитный
поток, пронизывающий контур катушки,
п
— число витков, L
—
индуктивность катушки.
Магнитный
поток можно вычислить, если звать
магнитную индукцию на любой
поверхности, замыкающей контур. В нашем
случае магнитное поле сконцентрировано
в цилиндрическом зазоре, где оно
распределено равномерно и направлено
нормально к поверхности. Обозначим
магнитную индукцию В.
В
качесте поверхности, замыкающей
контур, следует брать половину
цилиндрической поверхности S
(диаметр
кругового цилиндра равен ширине рамки
Ь,
длина цилиндрической поверхности —
длине рамки I)
и половины двух торцовых поверхностей.
Сразу же отметим, что магнитный поток
через эти торцовые поверхности будет
равен нулю, поскольку магнитная индукция
касательна к этим поверхностям.
Обратим внимание также на то, что
магнитный поток через цилиндрическую
поверхность Sabcd
может
быть представлен суммой потоков через
поверхности 5аь
и Sbcd
(ом.
рис. 4.4). Очевидно, можно записать ф
= фаь + фьс<г=фаь + фбс—фс<г = 2фаь-
Учитывая
соотношение между длиной дуги круга т
и углом а,
выраженным
в радианах, m
= 0,5fra, получаем
магнитный поток, пронизывающий контур
катушки, в виде ф = 2фаЬ
= 2Blm=Blba
и
энергию катушки в магнитном поле
W=Bflbna
+
L/2/2. (4.5)
Дифференцируя
(4.5) no
а
и учитывая, что индуктивность катушки
остается неизменной при ее повороте в
зазоре с равномерно распределенным
полем, получаем выражение для вращающего
момента:
м = В/Дп. (4.6)
да
Противодействующий
момент, создаваемый спиральными
пружинами, как известно, определяется
выражением Мпр
=—kMa.
Тогда
угол отклонения а можно выразить из
условия равенства моментов Мвр
и Мпр:
a = BblnI/kM. (4.7)
Это
есть искомое уравнение преобразования
(уравнение шкалы). Отклонение подвижной
катушки пропорционально току, т. е.
шкала равномерна.
Чувствительность прибора одинакова во всех точках шкалы и равна
SI = alI=Bbln/kt,u (4.8)
Из
выражения (4.7) следует, что при перемене
направления тока в
рамке
'изменяется знак вращающего момента и
направление отклонения рамки.
Решение
уравнения движения (4.3) показывает, что
яри включении магнитоэлектрического
прибора в цепь переменного тока
отклонение подвижной части а
определяется соотношением частоты
переменного тока <в к собственной
частоте колебаний подвижной части
<»о= Vkn//.
Если а»2>«>о, то подвижная часть
системы не успевает следовать за
изменением вращающего момента.
Отклонение подвижной части а
определяется средним за период Т
значением
вращающего момента
1 с 1, / д I. В I bn f • / I, ,j В I bn г f В I bti U лт)
« = —- JMbp(0* = —— \i{t)dt = — /СР = —
* О * Q «м «м °
(4.9)
где
i(t)
—
зависимость тока от времени, /ср
— среднее значение тока, R
—сопротивление
рамки.
Таким
образом, угол отклонения пропорционален
постоянной составляющей тока через
рамку. Для гармонического тока а = 0; в
случае же колебаний сложной формы
показания магнитоэлектрического
ИП определяются постоянной составляющей.
Обычно /о='(0о/2л
составляет единицы герц, поэтому при
включении магнитоэлектрических
приборов в цепь синусоидального тока
с частотой f>
10... 15 Гц отклонение их подвижной части
близко к нулю.
Основные
свойства и область применения. Благодаря
большой индукции в зазоре магнитоэлектрические
приборы обладают высокой
чувствительностью (до 0,01 мкА/дел.);
вследствие концентрации магнитного
поля в зазоре достигается помехозащищенность
от внешних магнитных полей и высокочастотных
помех; стабильность показаний
способствует высокой точности измерений
(класс до 0,05); для приборов этого типа
характерны равномерная шкала и малое
собственное потребление энергии (10 5
... 10^6
Вт), но так как измеряемый ток проходит
через тонкие спиральные пружинки,
перегрузочная способность приборов
мала. Стоимость магнитоэлектрических
ИП сравнительно высока.
Обычно
считают, что магнитоэлектрические
приборы пригодны только для измерений
на постоянном токе. Но это не совсем
так. При равенстве частот to
=
со0
подвижная часть ИП будет периодически
отклоняться в обе стороны от нулевого
положения с
максимальной амплитудой, пропорциональной
амплитуде переменного тока, с частотой
co»®0
и
с запаздыванием по фазе, близким к я/2.
На этом свойстве магнитоэлектрического
механизма основано действие так
называемых вибрационных частотомеров
н чувствительных вибрационных
гальванометров, в которых используется
явление механического резонанса. При
частотах отклоне
ния
подвижной части пропорциональны
мгновенным значениям вращающего
момента. Этот режим используется в
магнитоэлектрических шлейфовых
осциллограммах. Как видим,
магнитоэлектрические ИМ используются
и па переменном токе. Однако глав
ная
область применения магнитоэлектрических
ИМ является измерение постоянных
токов и напряжений ib
составе
электромеханических амперметров и
вольтметров, а также совместно с ИП
переменного напряжения в постоянное.
Токопроводящие пружинки магнитоэлектрического
механизма могут пропускать малый ток,
не превышающий 20... 50 мА. Магнитоэлектрические
ИП непосредственно могут применяться
юак микроамперметры, миллиамперметры
и милливольтметры. В магнитоэлектрических
амперметрах и вольтметрах постоянного
тока используют в качестве измерительной
цепи масштабные преобразователи —
шунты и добавочные сопротивления.
На
рис. 4.5,а, б
показаны схемы включения магнитоэлектрических
амперметров. Применение шунта позволяет
повысить пре-
<z>
э—>-
/Р-
а)
Ю
Рис.
4.5


делы
измерения тока, поскольку через шунт
протекает большая часть тока. Сопротивление
шунта
(4.10)
где
N
= IIIр,
I
— измеряемый ток, /р
—ток через рамку, Rp—
сопротивление рамки.
Чувствительность
амперметра, состоящего из ИМ и шунта,
можно выразить как
(4.11>
1£(ш)
__JN
_
lS/HM)
h
__
£(им) / Rp
J
Im
~f" I
d \ Rm
An
+ A>
где
Si(HM>
— чувствительность
измерительного механизма, Rp,
Rm
— сопротивления
рамки и шунта.
На
рис. 4.5,в показана схема соединения
магнитоэлектрического вольтметра.
Ток через вольтметр должен быть малым,
что достигается 'включением
последовательно с катушкой
магнитоэлектрического ИМ резистора
Rno6
с
достаточно большим сопротивлением.
Величина
добавочного сопротивления, очевидно,
выразится как Ядоб=(Н//р)-ДР. (4.12)
Чувствительность
магнитоэлектрического .вольтметра с
добавочным сопротивлением
осд,
а 5<““>/р S'™’ ЯГ’ //11Чч
Ьи =—- = = да (4.13)
U (R
+
Ядоб) Ядоб + Я Ядоб
Как примеры серийных магнитоэлектрических приборов, можно привести щитовые приборы, используемые в качестве выходного в аналоговых электро- радиоизмерительных устройствах, с подвижной частью на кернах с внешним магнитом — М-2002 (пределы 0... 25 мкА, класс 1, 5, сопротивление рамки R = 3 кОм, время успокоения т=4 с), с внутренним магнитом — М-263М (0... ...50 мкА; 1, 5; 900 Ом; 3 с) и с подвижной частью на растяжках и с внешним электромагнитом — М-1400 (25... 0... 25 мкА; 1350 Ом; 1, 5, 4 с), а также образцовые переносные приборы с подвижной частью на растяжках — М-1109 (0—1,5 мА; 0—600 мВ; 400 Ом; 0, 2, 4 с) и высокочувствительные гальванометры на подвесе М-17/5 (с= 1,8-10—9 А/мм, R = 90 Ом).
ИЗМЕРИТЕЛЬНЫЕ ПРЕОБРАЗОВАТЕЛИ ПЕРЕМЕННОГО НАПРЯЖЕНИЯ В ПОСТОЯННОЕ
Измерительная
операция преобразования .переменных
электрических сигналов в .постоянное
напряжение является одной из самых
распространенных в технике
электрорадиоизмерений.
Наиболее
широко применяемыми измерительными
преобразователями этого типа являются
выпрямительные и термоэлектрические.
Выпрямительные
преобразователи используют выпрямление
(детектирование) переменного тока с
помощью нелинейных элементов—
вакуумных и полупроводниковых диодов
(детекторов). В силу этого выпрямительные
измерительные преобразователи называют
детекторами.
Термоэлектрические
измерительные преобразователи
используют нагрев переменным током
горячего спая термопары, возникновение
термо-ЭДС и постоянного тока в цепи
термопары.
Прежде
чем рассматривать вопросы преобразования
переменного напряжения и тока в
постоянные, напомним, что переменное
напряжение характеризуется четырьмя
основными параметрами.
Пиковое
значение Um
(для
гармонического колебания — амплитудное)
— это наибольшее мгновенное значение
напряжения u(t)
за
время измерения Т
(или за 'период Т).
Если напряжение за время измерения или
период изменяет знак, а кривая .напряжения
несимметрична, то различают положительные
и отрицательные пиковые значения.
Среднее
значение .За 'время измерения (или за
период) — это постоянная составляющая
напряжения u(t):
U0 = —\u(t)dt. <4.14)
т
о
Средневыпрямленное
значение (СВЗ) — среднее значение
абсолютного значения напряжения
UCB = -±-J\u(t)\dt. (4.15)
1
о
Среднеквадратическое
значение (СКЗ) — это положительный
корень квадратный из среднего значения
квадрата напряжения:
j/yjua(f)*- (4-16)
Совокупность
значений переменного напряжения
является интегральной характеристикой
его формы. В практике измерений для
этого используют коэффициенты формы
k$,
амплитуды
ka,
усреднения
ky
(табл.
4.1): &ф=(У/£/св,
ka=UmjU,
£у = 6ф6а
= 1Лп/Нсв.
Таблица 4.1
Коэффициенты ka, кф, ky для напряжений различной формы
|
Напряжение |
|
|
Ч |
|
Синусоидальное |
1,41 |
1,11 |
1,56 |
|
Однополярное пилообразное |
1,73 |
1,16 |
2,00 |
|
Прямоугольной формы с симметричными полупе- |
1 |
1 |
1 |
|
риодами — меандр |
|
|
|
Коэффициенты
ka,
кф,
ky
позволяют
получать значения переменного
напряжения, если известно одно из них
и форма напряжения.
Остановимся
сначала на 'выпрямительных измерительных
преобразователях. Они предназначаются
для выпрямления (детектирования)
переменного тока, превращения его в
пульсирующий ток, среднее значение
которого представляет собой выходную
величину и может быть пропорционально
пиковому (амплитудному), сред-
невыпрямленному или среднеквадратнческому
значениям входной величины. В зависимости
от этого различают следующие основные
типы выпрямительных измерительных
преобразователей: пиковые (амплитудные)
детекторы, детекторы средпсвыпрямленпого
и среднеквадратического значения.
Пиковые
(амплитудные) детекторы. Пиковый детектор
— это измерительный преобразователь,
на выходе которого постоянная составляющая
непосредственно соответствует пиковому
значению напряжения на входе.
Принципиальные
электрические схемы пиковых детекторов
изображены на рис. 4.6,а — последовательный
детектор с открытым входом и б —
параллельный детектор с закрытым
входом.
В
пиковом детекторе с открытым входом
постоянная составляющая выходного
сигнала содержит постоянную составляющую
входного сигнала, если таковая имеется.
В детекторе же с закрытым входом
постоянная составляющая выходного
сигнала не содержит постоянной
составляющей входного сигнала — для
нее вход закрыт. Пиковый детектор должен
обязательно содержать элемент,
запоминающий пиковое значение напряжения.
Таким элементом обычно является
конденсатор, заряжаемый до пикового
значения через диод.
Остановимся
на пиковом детекторе с открытым входом.
Рассмотрим случай, когда на вход
поступает синусоидальное напряжение
uBX—Um
sin со/.
В
положительные полупериоды входного
напряжения ивх
происходит заряд конденсатора С
через малое прямое сопротивление диода
Рд
и внутреннее сопротивление источника
Ri.
В
отрицательные полупериоды конденсатор
разряжается через большое сопротивление
R
(рис.
4.7,а). Постоянная времени разряда много
боль
Рнс.
4.7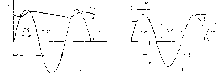
ше
постоянной времени заряда тР
= РСЗ>Тз= [Ял
+ Яг] С.
Поэтому напряжение на конденсаторе
возрастает и через несколько периодов
на обкладках устанавливается постоянное
напряжение Uc
(•постоянная
составляющая пульсирующего напряжения),
почти равное амплитуде входного
напряжения Um.
Поскольку
Uc
все
же несколько меньше Um
вследствие
разряда конденсатора во время
отрицательного полупериода, то в течение
времени, .когда uB]i>Uc,
через
диод будут проходить импульсы тока,
пополняющие заряд кондеиастора. Через
диод будет проходить ток в течение
пеболь-
шой
части периода, характеризуемый углом
отсечки 0. Напряжение
на конденсаторе, как это следует из
рисунка, можно записать в виде:
(4.17)f/c~t/mSin(90°—0)
=
(7miCOS0.
Отсюда
можно выразить коэффициент передачи
пикового детектора, как
(4.18)
Будем
считать Uc
постоянным
и течение периода входного напряжения.
Полагая равными в установившемся режиме
приобретаемый и теряемый емкостью
С
электрические заряды, можно получить
выражение для угла отсечки [23]:

(4.19)
Подставляя
(4.19) в (4.18) и ограничиваясь первыми двумя
членами разложения косинуса в степенной
ряд, можно получить
[14]
(4.20)/Сд=1-2,22[(#г-
+ Яд)/Яр/з.
Отсюда
следует, что с уменьшением отношения
(Ri-\-
Rn)lR
коэффициент
передачи /Сд-»-1.
Однако возможности уменьшения этого
отношения весьма ограничены. Наибольшее
значение R
обычно
не превышает 10 МОм и ограничено
сопротивлением утечки и шунтирующим
действием входного сопротивления
последующего каскада. Сопротивление
диода Ra
составляет
около 1 кОм. Даже при Ri
= 0 Кл=0,998,
а при Ri
—
10
«Ом /<д
уменьшается до 0,951.
На
практике при использовании пикового
детектора принимают /Сд
= 1, выражение же (4.20) используется для
оценки систематической погрешности,
обусловленной зарядом и разрядом
конденсатора в течение периода.
Соотношение
(4.19) получено в предположении о неизменном
ис.
Это предположение может быть реализовано
лишь при С-*-оо.
Но с ростем емкости уменьшается
сопротивление утечки конденсатора,
уменьшаются R
и
Кд.
Емкость не может быть слишком большой
(обычно она порядка десяти тысяч
пикофарад) и приходится учитывать
уменьшение Uc
за
время разряда емкости. Это обстоятельство
является источником систематической
погрешности, которая будет рассмотрена
ниже. Отметим, что выделить постоянную
составляющую Uc
из
пульсирующего напряжения ис
можно с помощью магнитоэлектрического
прибора.
Если
на вход схемы, показанной на рис. 4.6,а,
подать напряжение «зх=
UQ
+ Um
sin со^,
в котором содержится как переменная,
так и постоянная составляющие, то,
очевидно, конденсатор С
зарядится до напряжения, определяемого
суммой постоянной и амплитуды
переменной составляющих, т. е. до пикового
значения U'm
— Uo + Um.
Таким
образом, на выходе пикового детектора
с открытым входом имеет место постоянное
напряжение Uc,
учиты
вающее
как переменную, так и постоянную
составляющие на входе.
Для исключения пульсаций выходного
напряжения на выходе включается фильтр
нижних частот.
Рассмотрим
теперь пиковый детектор с закрытым
входом (рис. 4.6,6). Пусть на вход подводится
синусоидальное напряжение uBx
=
Um
sin cot.
В
течение нескольких положительных
полулерио- дов «вх конденсатор С
заряжается через сопротивление диода
#д
и внутреннее сопротивление источника
Rt
почти
до значения Um.
Разряд
происходит в отрицательные полупериоды
через очень большое сопротивление R
и
внутреннее сопротивление источника
Ri.
Постоянная
времени разряда много больше постоянной
времени заряда тР=(Я
+ Яг)С»тз= (Яд + Я*)С. Поэтому напряжение
ис
за
время отрицательного полупериода
изменится очень мало. Заряженный
конденсатор можно рассматривать как
источник постоянного напряжения
Uc^Um-
Рассмотрим
напряжение на нагрузочном резисторе
R.
Из
схемы рис. 4.6,6 следует: uR
= uBX—ис^ивк—Uc
= Umsin<ot—Uc.
Когда
входное напряжение достигает
положительного максимума, t/н
—
О
(рис. 4.7,6). При отрицательном максимуме
uR—2Um,
поскольку
Uc~Um.
Видим,
что на резисторе выделяется пульсирующее
напряжение. Среднее значение этого
напряжения примерно равно Um.
Заметим,
что измерить его с помощью
магнитоэлектрического прибора
затруднительно, поскольку на низких
частотах заметно колеблется стрелка.
В связи с этим напряжение и
и
сначала подается на фильтр нижних
частот, который пропускает постоянную
составляющую Uc~Um,
а
затем измеряется вольтметром постоян-
ного тока.
Если
входное напряжение представляет собой
переменное напряжение, то обе схемы
детектора дают одинаковые результаты:
постоянная составляющая напряжения
на конденсаторах весьма близка к Um,
т.
е. равна амплитуде измеряемого напряжения.
Если же входное напряжение пвх
содержит постоянную составляющую
uBX=U0
+ Umsincot,
то
конденсатор зарядится дополнительно
и напряжение на конденсаторе
увеличится на U0,
т.
е. Uc~Um
+ U0.
Полярность
этой дополнительной постоянной
составляющей на конденсаторе (—С/о)
будет обратной полярности постоянной
составляющей С/0,
действующей на входе. Сумма этих
напряжений на резисторе R
будет
равна нулю, а постоянная составляющая
выходного напряжения не будет содержать
постоянной составляющей входного
напряжения.
Пиковый
детектор с закрытым входом позволяет
выделить из пульсирующего напряжения
на входе только переменную составляющую
в виде постоянной составляющей выходного
напряжения, равной амплитуде переменной
составляющей.
Пиковые
детекторы применяются также для
преобразования импульсных сигналов в
постоянное напряжение, соответствующее
амплитуде импульсов. Определенные
трудности возникают при преобразовании
последовательности импульсов большой
окааж- ности, а также редко повторяющихся
и одиночных импульсов. Эти трудности
обусловлены тем, что напряжение на
конденсаторе пикового детектора
оказывается меньше амплитуды импульсов
Um,
так
как за время паузы конденсатор успевает
разрядиться. Это приводит к погрешности,
зависящей от скважности импульсов. Для
преобразования редко повторяющихся,
в том числе одиночных импульсов,
пиковые детекторы используются в
специальном режиме расширения импульсов.
Расширение
сводится к увеличению длительности
измеряемого импульса до значения,
достаточного для измерения его
вольтметром постоянного напряжения.
При использовании цифровых вольтметров
эта длительность должна составить
несколько миллисекунд.
Остановимся
на вопросе о входном сопротивлении
пикового детектора. Это важно, [поскольку
пиковые детекторы часто используются
в качестве первых каскадов вольтметров.
Особенности входного сопротивления
могут быть проанализированы из
рассмотрения эквивалентной схемы
рис. 4.8,а, где L0,
Rq,
С0
— распреде

ленные
индуктивность, активное сопротивление,
емкость подводящих проводов, Rдиэл
— активное сопротивление, обусловленное
потерями в диэлектрике, RBX
—
входное активное сопротивление
детектора, Сд
— междуэлектродная емкость диода.
Для
уменьшения влияния паразитных параметров
на входное сопротивление детектора,
последний часто (выполняется в виде
выносного пробника, благодаря чему
длина проводов существенно уменьшается.
Входные
активные сопротивления у детекторов
с открытым и закрытым входом не одинаковы:
Rbx откр = -^/2/Сд, Rbx закр = RI (2Кд + 1),
где
Ка
— коэффициент передачи детектора. В
связи с тем, что Кд«1,
Явхоткр«Я/2, a Rbx закр ~/?/3.
Как
будет изменяться входное сопротивление
детектора в диапазоне частот? На
-низких частотах эквивалентная схема
(рис.
представляет собой -параллельное соединение -входного активного сопротивления детектораRBXи емкости монтажа С0, составляющей обычно единицы пикофарад.
С
ростом частоты начинает сказываться
и индуктивность вводов (рис. 4.8,в).
Тогда эквивалентная входная емкость
С'вх
может быть оценена так:
где
соР
— резонансная частота контура,
образованного L0
и
Свх
= = Со + Сд.
Можно видеть, что вблизи резонансной
частоты сильно будет возрастать
эквивалентная входная емкость.
По
мере приближения к резонансу начинает
оказываться шунтирующее действие
потерь в диэлектрике, уменьшающее
входное сопротивление вольтметра,
растет активное сопротивление подводящих
проводов за счет поверхностного эффекта.
На СВЧ начинает сказываться инерция
электронов — конечное время пролета
электронами междуэлектродного
пространства в вакуумном диоде.
Оценим
изменение коэффициента преобразования
детектора, обусловленное влиянием L0
и
Свх.
Обращаясь к эквивалентной схеме (рис.
4.8,а) и полагая RBX^>
(1/wCbx), получаем
напряжение Uд
на нагрузке детектора в виде

ш Свх IcoZ-o—I / со Свх (
и
коэффициент преобразования Kaf=Ua!Uw
= \/(l~
со2/со2Р).
Чтобы
расширить частотный диапазон, необходимо
увеличить резонансную частоту детектора.
Пределом уменьшения паразитных
параметров является емкость анод —
катод диода Сд
и индуктивность его выводов.
Резонансная частота детекторных головок
составляет 1...2 ГГц.
На
СВЧ начинает сказываться конечное
время пролета электронов в диоде от
катода к аноду. За время, когда напряжение
на аноде превышает напряжение на катоде,
не все электроны успевают достигнуть
катода и импульс тока уменьшается. Это
приводит к менее интенсивному заряду
конденсатора Сив результате к
изменению коэффициента преобразования
детектора:
Knx^Uc/Um=l-kdf/VUm,
где
/ — рабочая частота; d
—
расстояние между анодом и катодом,
k
—
постоянный коэффициент, зависящий от
конструкции диода (для параллельных
электродов k
= 7•
10_6-м_1-Гц-1-В1/2).
В
погрешность преобразования 6КЛ
синусоидального напряжения входят
следующие частные систематические
погрешности:
относительная
погрешность, обусловленная отклонением
коэффициента преобразования от
единицы вследствие разряда конденсатора
61=*д-1 —2,22[
относительная
погрешность из-за резонанса во входной
цепи
относительная
погрешность за счет конечного времени
пролета электронов междуэлектродного
пространства
6,=*дх-1 = -ы//1/1а7,
а
также случайная погрешность вследствие
нестабильности сопротивлений R,
Яд.
Детектор
среднеквадратического значения. Детектор
среднеквадратического значения
(СКЗ) — это измерительный преобразователь
переменного напряжения в постоянное,
пропорциональное квадрату СКЗ
переменного напряжения. Измерение СКЗ
напряжения связано с (выполнением
квадрирования, усреднения и извлечением
квадратного корня [ем. (4.16)]. Первые две
осуществляются детектором. Операция
извлечения корня должна осуществляться
градуировкой аналогового измерительного
прибора, подключаемого к выходу
детектора СКЗ. Таким образом, детектор
СКЗ должен иметь квадратичную функцию
преобразования, а сам нелинейный элемент
квадратичную вольт-амиерную характеристику.
Детектор
СКЗ при этих условиях позволяет
осуществлять преобразование в
постоянное напряжение СКЗ переменных
напряжений несинусоидальной формы,
поскольку U2=
У
U2h,
где
U2
—
*=о
СКЗ
напряжения несинусоидальной формы, Uh
—
СКЗ гармонических составляющих.
В
качестве нелинейного элемента детектора,
имеющего квадратичную вольт-амперную
характеристику (ВАХ), можно, например,
использовать начальный участок ВАХ
полупроводникового днода. Однако участок
этот имеет очень малую протяженность.
Полупроводниковые диоды имеют большой
разброс параметров на этом участке
характеристики. Поэтому большее
распространение получили детекторы
на основе диодной цепочки. Такая цепочка
позволяет получить квадратичную ВАХ
в результате кусочно-линейной аппроксимации
параболической кривой. Схема квадратичного
преобразователя с диодной цепочкой
показана на рис. 4.9.
Входное
напряжение ивх
подводится к широкополосному
трансформатору 77. С помощью диодов
VD1
и
VD2
во
вторичной обмотке осуществляется
двухгголуперйодное выпрямление.
Выпрямленное напряжение действует
на цепь, состоящую из диодной цепоч-
Рис.
4.9
ки
VD1...VD8,
R3...R14
и
резистора нагрузки R15.
Падение
напряжения на нагрузке через фильтр
нижних частот Z1
подается
на выход преобразователя.
Выходное
напряжение пропорционально среднему
значению тока диодной ячейки. Диодная
цепочка имеет близкую к параболической
вольт-амперную характеристику. Поэтому
среднее значение выходного напряжения
оказывается пропорциональным квадрату
среднеквадратического значения входного
напряжения.
Кап
обеспечивается квадратичная вольт-амперная
характеристика? Делители напряжения
R3...R13
подключены
к общему стабилизированному источнику
напряжения Е.
Делители подобраны так, что смещения
Uu
подаваемые
на диоды, удовлетворяют соотношению
Ui<U2<
...
<U6.
Пока
входное напряжение цепочки U
не
достигает U\
(рис.
4.10), все диоды закрыты и начальная часть
ВАХ является прямой линией с наклоном,
зависящим от сопротивлений резисторов
Rl,
R2
и
R15.
Когда
напряжение U
превысит
Uu
откроется
диод VD3
и
параллельно R2
подключится
делитель R3,
R9.
Крутизна
ВАХ на участке от U\
до
U2
возрастает,
ток в цепи станет t2
=io
+
ii
(рис.
4.10). Когда выполнится условие U>U2,
в
цепи преобразователя будет протекать
ток i^
= io + i\ + h-
Крутизна
ВАХ будет увеличиваться с ростом U.
Выбирая
соответствующим образом сопротивления
делителей, можно получить ВАХ в виде
ломаной линии, приближающейся к
квадратичной параболе. Таким образом,
квадратичная характеристика синтезируется
из начальных участков характеристик
ряда диодных ячеек, что показано на
рис. 4.10.
Коэффициент
преобразования детектора по току K\
= I/UZ,
где
/—среднее значение тока на выходе
преобразователя, U
—
СКЗ входного напряжения.
При
использовании в преобразователе
магнитоэлектрического прибора (включается
вместо R15)
усреднение
осуществляется прибором, а операция
извлечения квадратного корня реализуется
градуировкой шкалы. Тогда показания
прибора будут
а = У*^=Кд1/.
где
ЛГд — коэффициент преобразования
детектора СКЗ по отклонению.

Погрешность
преобразования таких преобразователей
определяется нестабильностью ВАХ
диодов, непостоянством сопротивлений
резисторов и т. д. Она составляет 3
... 5%.
Рис.
4.10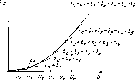
Частотный
диапазон определяется свойствами
трансформатора — индуктивностью
(снизу) -и паразитными параметрами
диодной цепочки (сверху) и составляет
интервал от нескольких герц до 1 МГц.
Детектор
средневыпрямленного значения. Это
измерительный преобразователь переменного
напряжения в постоянный ток,
пропорциональный средневыпрямленному
значению входного сигнала (среднему
значению модуля). Вольт-амперная
характеристика такого детектора
должна иметь линейный участок в пределах
диапазона входных напряжений. Примером
подобного преобразователя может служить
двухполупериодный выпрямитель с фильтром
нижних частот. Усреднение может быть
выполнено магнитоэлектрическим
прибором. Наиболее распространенными
являются мостовые схемы (рис. 4.11). В
схеме рис. 4.11,а ток через диагональ моста
протекает в одном и том же направлении
в течение обоих полупериодов переменного
напряжения. В положительный полу- период
ток протекает по цепи: верхний входной
зажим—'диод VD1
—
диагональ моста — диод VD4
—
нижний входной зажим; в
“бкУ
![]()
VB4
II
Z1
■o-
RZ
lL
vu*t
—cn-
VS3~t
\ R
a)
отрицательный:
нижний зажим — диод VD3—
диагональ моста — диод VD2
—
верхний
зажим.
Направление
тока соответствует проводящему
направлению указанных диодов.
Характеристики реальных диодов не имеют
строго линейного участка, как это
требуется условиями преобразования.
Ток, протекающий через диод при
положительном значении входното
напряжения i~uj(Ra(U)
+
R),
где Ra(U)
—
сопротивление открытого диода,
зависящее от приложенного напряжения,
R
—
сопротивление нагрузки. Начальный
участок характеристики близок к
квадратичному. Поэтому будет иметь
место погрешность, которая будет тем
меньше, чем ближе к линейной будет
характеристика диода.
Для
улучшения линейности ВАХ в диагональ
моста последовательно с резистором
R
включают
такой резистор Ядоб,
сопротивление которого намного
больше сопротивления открытого дио-
Г. т-. . и и
да
Rn(U).
В
этом случае t
= да .
М ' * Яд (U) + R + Ядоб Ядоб
Зависимость
прямого тока от напряжения будет близка
к линейной. Уменьшение чувствительности,
которое будет при включении Ra06,
можно
компенсировать введением дополнительного-
усиления.
Схема
рис. 4.11,6 отличается от предыдущей тем,
что вместо диодов VD3
и
VD4
включены
резисторы R1
и
R2.
В
положительный полупериод напряжения
ток протекает через диод VD1
и
резистор R1.
Через
резистор R2
в
этот полупериод ток не протекает, на
его зажимах напряжение равно нулю.
Поэтому, если в диагональ моста
включить магнитоэлектрический вольтметр,
он измеряет падение напряжения на
R1.
В
отрицательный полупериод вольтметр,
очевидно, измеряет падение напряжения
на резисторе R2,
поскольку
через него и диод VD2
будет
протекать ток.
Уравнение
преобразования для рассмотренных схем,
очевидно,, можно выразить:
для
схемы рис. 4.11,а при ЯД1
=Яд2'=-Ядз
= Яд4
= Яд
и0 = КЛсвисв = —И—-Пев,
2кд
+ R
при
Я»ЯД
имеем UQ
= UCB',
для
схемы рис. 4.11,6 при Яд1
= ЯД2
= Яд;
Я1
+ Я2
= Я,
U0 = Кп СВ ^св — Dip ^св’
Кд -р К
при
Я»Яд U=Uсв-
Погрешность
преобразования обусловлена, главным
образом, нелинейностью ВАХ диода и
влиянием прямого сопротивления диода
на ток, протекающий через выпрямительный
мост.
Фазовый
детектор представляет
собой измерительный преобразователь,
на входы которого подаются переменные
напряжения одной частоты щ
и и2,
а на выходе выделяется постоянная
составляющая напряжения, функционально
связанная с разностью фаз ф.
На
рис. 4.12,а изображена схема балансного
фазового детектора. Напряжение иi
подводится
к первичной обмотке трансфор-
Рис.
4.12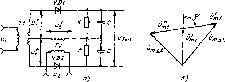
матора
Т1;
во вторичной обмотке составляющие этого
напряжения и'х
и и"
1
имеют одинаковые амплитуды и противоположные
фазы. Напряжение и%
подается через трансформатор Т2
на входы детекторов в одинаковой фазе.
Таким образом, на входах детекторов
будут действовать напряжения: иА\
— и\-\-и'2
и uAZ—u"i
+ u'2.
Амплитуды
результирующих напряжений ,на входах
детекторов £Лпд1
и UmД2
можно определить из векторной диаграммы
(рис.
4.12,6):
V.
» - + (уу«+ЯД, Vml
cos ф,

Здесь
учтено, что Um'i=Um"l.
В
результате линейного детектирования
(одно из напряжений щ
или и2
принимается за опорное и может быть
сделано достаточно большим) напряжения
на нагрузках детекторов будут:
иВЫХ1=Клитл1
и UBax2=Кдитя2,
где Ка
— коэффициент преобразования детектора.
Выходное напряжение фазового детектора

-ViPUf+ 4n,COS ф) =

Выражение
(4.21) представляет собой уравнение
преобразования фазового детектора.
Поскольку величина 2U'miU'm2/
и
ВЫХ
—
(4.22|+
(U'mг)2<1
при и'тфи'т?,
слагаемые (4.21) можно разложить в степенной
ряд. Ограничиваясь первыми двумя членами
разложения, имеем
В
первом приближении уравнение преобразования
фазового балансного детектора носит
косинусоидальный характер.
Если ТО ИЗ
(4.22)
получим ивых
=
2Кли'т1
COS
ф.
В
этом случае крутизна преобразования
(5=(?С/Вых/<?ф)
оказывается максимальной. При ф = 90°
Uвых=0.
В этом состоит удобство индикации
разности фаз ф = 90°.
Исследования
(4.21) показывают, что при U'mi~U'm2
уравнение
преобразования практически линейно.
Однако крутизна преобразования
оказывается меньше, чем в случае
существенного различия между амплитудами
U'm
1
и U'm2-
Если напряжения U'mi
и
U'mi
поддерживать
постоянными, а на выходе фазового
детектора включить вольтметр
постоянного тока и проградуировать его
шкалу в значениях разности фаз, то
фазовый детектор может быть применен
для измерения разности фаз.
Фазовый
детектор применяется также в схемах
сложных фазометров, в системах фазовой
автоподстройки частоты.
Термоэлектрические
измерительные преобразователи обладают
квадратичной функцией преобразования:
выходное напряжение (ток) прямо
пропорционально квадрату входного
напряжения (тока).
Конструктивно
термопреобразователи состоят из
нагревателя ЕК1
и одной или нескольких соединенных в
батареи термопар BKI...BK3
(рис.
4.13), в которых под действием тепла,
выделяе-
Рис.
4.13
а)
-9
1х
X
ЕМ
а)
ez
ВК1
9
+

мого
в нагревателе измеряемым током 1Х,
возникает термо-ЭДС Ет,
которая в замкнутой цепи термопар
вызывает термоэлектрический ток
/т.
Нагреватель представляет собой тонкую
проволочку из константана, нихрома,
вольфрама, платины и других нагревостойких
материалов. Термопары обычно выполняют
из разнородных металлов или их
сплавов: золото-палладий, железо-кон-
стантан, висмут-сурьма, медь-константан,
хромель-копель, хромель- алюмель.
Пусть
температура рабочего спая термопар 0Ь
а температура нерабочих (холодных)
концов — 02.
При 0i>02
между
концами термопар в соответствии с
эффектом Зеебека возникает термо- ЭДС
Ег,
прямо пропорциональная разности
температур 01—02.
Определим
характер зависимости между термо-ЭДС
и измеряемым током. Положим, нагреватель
термопары включен в цепь измеряемого
переменного тока £*. Тогда количество
тепла QH,
которое
выделяется в нагревателе за период
переменного тока
i\(t) dt, (4.23)
о
где
Rh
—
активное сопротивление нагревателя.
Тепло, отводимое от нагревателя за то
же время Т\
Qo=cSQT, (4.24)
где
с
— коэффициент теплоотдачи, S
—
поверхность охлаждения нагревателя,
0 = 0j—02—
разность температур нагревателя и
окружающей среды.
В
установившемся режиме QH=Qo-
Приравнивая
(4.23) и (4.24)
R ^ R
и
выражая 0, получаем 0 = —— f
«£$
=—— 1\-
Здесь 1Х—средне-
cST q cS
квадратическое
значение тока. Поскольку Ет
прямо пропорционально 0, то уравнение
термоэлектрического преобразователя
будет иметь вид
Er = kl\, (4.25)
где
k
—коэффициент,
зависящий от конструктивных параметров
нагревателя и термоэлемента.
Эта
зависимость справедлива при малых
температурах. При больших температурах
будут сказываться потери тепла на
теплоизлучение; при выводе (4.25)
учитывали лишь потери на теплопроводность.
Термопреобразователи
изготавливаются контактными и
бесконтактными. В бесконтактном
преобразователе (рис. 4.13,6) нагреватель
изолирован от термопары и не имеет с
ней гальванической связи. Эта мера
позволяет последовательно соединять
термопары, создавать батареи термопар,
повышая чувствительность термопреобразователя
(рис. 4.13,в). Бесконтактные термопреобра-
зоватсли обеспечивают лишь слабую
емкостную связь между входной и
выходной цепью, а следовательно, и
слабое влияние измерительного
преобразователя на измеряемую цепь.
Сказывается связь и через взаимную
индуктивность.
Для
повышения чувствительности изготавливают
вакуумные термопары. В них уменьшаются
потери на передачу тепла воздуху.
Термоэлектрические
преобразователи используются в
высокочастотных амперметрах и
вольтметрах на частотах до 300 МГц в
качестве основного измерительного
преобразователя с квадратичной
характеристикой. К зажимам термопар
подсоединяется чувствительный
магнитоэлектрический прибор. При этом
для повышения чувствительности
необходимо обеспечить согласование
сопротивления батареи термопар и
сопротивления рамки. Чувствительность
также можно повысить применением УПТ.
Вследствие малой чувствительности
преобразователей в вольтметрах
применяют высокочастотные усилители.
Однако
уже на частотах 5...10 МГц частотная
погрешность составляет до 10%. С
увеличением частоты вследствие
поверхностного эффекта увеличивается
сопротивление нагревателя. Часть
энергии ответвляется через шунтирующую
цепь, образованную емкостями между
отдельными частями прибора, минуя
нагреватель. Поэтому на ВЧ и СВЧ
применяют пленочные термопары, которые
напыляются на слюдяные, стеклянные и
другие диэлектрические подложки. В
качестве металлов выбирают висмут-Сурь-
му или хромель-копель. Основные
достоинства таких преобразователей:
хорошее согласование с трактом СВЧ,
устойчивость к перегрузкам, высокий
коэффициент преобразования. Пленочные
преобразователи применяют в
измерителях мощности на СВЧ.
Недостатками
являются значительное собственное
потребление энергии, малая чувствительность,
малая перегрузочная способность (у
проволочных термоэлементов), инерционность.
Погрешности
преобразования связаны с отклонением
характеристики преобразования от
квадратичной, старением, в результате
чего изменяются свойства термопары,
частотной погрешностью, обусловленной
поверхностным эффектом, индуктивностью
подогревателя и проводов, емкостью
относительно земли.
Термоэлектрические
амперметры и вольтметры имеют вследствие
этого основную погрешность не менее
1%.
АНАЛОГО-ЦИФРОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Важнейшими
измерительными преобразователями
цифровых измерительных приборов, во
многом определяющими их характеристики,
являются аналого-цифровые преобразователи
(АЦП). Назначение АЦП состоит в
преобразовании аналоговой величины
на входе в дискретную величину на выходе
преобразователя, представленную в
виде некоторого цифрового кода (например,
число импульсов, совокупность состояний
электронных устройств, соответствующих
числу в двоичной системе счисления и
т. д.).
В
качестве аналоговой величины для
преобразования в цифровой код при
создании цифровых измерительных
приборов чаще всего выбирают интервал
времени и напряжение.
В
данном параграфе рассмотрим простейшие
АЦП временного интервала и постоянного
напряжения. Последние в зависимости
от метода преобразования разделяются
на АЦП временного преобразования,
частотного преобразования и поразрядного
уравновешивания.
АЦП
интервал времени — цифровой код.
Сущность
аналого- цифрового преобразования
интервала времени состоит в том, что
измеряемый интервал х сравнивают с
образцовым интервалом, воспроизводящим
единицу времени. Это достигается
заполнением измеряемого интервала
импульсами с калиброванным периодом
следования Тк
«Ст. Интервал времени представляется
пропорциональным ему числом импульсов.
Структурная
схема АЦП, реализующего такое
преобразование, приведена на рис.
4.14,а.
а) 5)
Рис.
4.14
Преобразуемый
интервал представляется промежутком
времени между двумя импульсами,
которые могут быть либо от одного
источника, либо от разных. Эти импульсы
подаются на триггер. Если импульсы,
задающие интервал, поступают от разных
источников, применяется триггер с
раздельными входами; если от одного
— триггер со счетным входом. В исходном
состоянии триггера (0) на вход 2
временного селектора подается
отрицательное напряжение. Импульсы,
калиброванные по периоду следования
(счетные импульсы), поступают на вход
1
временного селектора. При отрицательном
напряжении на входе 2
они не могут пройти на выход. С приходом
первого импульса (опорного) триггер
перебрасывается в состояние 1,
при котором на входе 2
появляется положительное напряжение.
Счетные импульсы начинают поступать
с выхода временного селектора. С приходом
интервального импульса, задающего
конец интервала времени, триггер
перебрасывается в состояние 0 и
поступление счетных импульсов с выхода
временного селектора прекращается. На
рис. 4.14,6 -приведена временная диаграмма
сигналов, действующих в схеме
преобразователя. Триггер в результате
двухкратного -переброса формирует
прямоугольный импульс с крутыми
фронтами, равный по длительности
преобразуемому интервалу времени. Этот
импульс называют стробирующим. За
время действия -строб-импульса с выхода
селектора на счетчик -импульсов поступают
счетные импульсы.
Обозначим
период счетных импульсов Тсч,
их частоту Fc4;
при
х>Тсч
число импульсов m
на
выходе временного селектора будет
(4.26)
m
;;
гпт
= Ent
—Е-
= Ent
(т
FC4)
■%xzmT
где пгт — число целых периодов, которые укладываются в интервале, Ent — обозначает целую часть.
Уравнение (4.26) есть уравнение преобразования. Оценим погрешность преобразования интервала времени в число импульсов.
Из уравнения (4.27), принимая во внимание существо метода преобразования, можно выразить реализацию относительной погрешности определения временного интервала 6т в виде 6т = = 6тд—бтг, где 6тд — относительная методическая погрешность, обусловленная тем, что, во-пер- вых, не учитывается дробная часть периода счетных импульсов, во-вторых, за число периодов берется число импульсов (погрешность дискретности); бтг —
•относительная погрешность, с которой известен период счетных импульсов.
Оценим сначала погрешность дискретности бтд=Дтд/т, Дтд — абсолютная погрешность дискретности.
Из рис. 4.15, где показано заполнение интервала счетными импульсами, видно, что
т= (ш— 1) 7'сч “Ь Дт н "Ь Дтк = tnTсч—Дтн Дтк — fliTcn Дтд, (4.28)
поскольку Дтн= (Т'сч—Дт'н).
Соотношение (4.28) можно рассматривать как точное значение преобразуемого интервала т, выраженное через измеренное значение тТсч, и некую реализацию погрешности дискретности Дтд = = Дт„—Атк. Составляющие погрешности дискретности Дтн и Дтк возникают в начале и конце интервала т. Момент прихода счетного импульса не связан с моментом начала преобразуемого интервала. Поэтому Дтн может принимать любые значения от 0 до Тсч, все значения будут равновероятны. Следовательно, составляющая погрешности дискретности является случайной погрешностью, распределенной в границах от 0 до Гсч по равновероятному закону.
Плотность распределения вероятности выражается, как
(4.27)
лгн'
-Л ■г.
Рис. 4.15
ч
\итсч
т„)
- 1 0
/(Дтн)
при
Д тн
< 0; Д тн
>;гсч.
Выделим
систематичесткую погрешность, определив
математическое ожидание погрешности
Дт„:
Дсн(Л
тн)
= fсч
-L-Д
тн
d
(Д
тн)
= .
о
* СЧ *
о
Центрированная
случайная погрешность Д(Дтн)
=Дтн—Дс(Дтн)
будет изменяться в границах ±ТСч/2.
Среднее квадратическое значение
погрешности А(Атн)
«а = 9 У Д2 (Дтн) rf (Д [Д ти]> = _^ся .
О _ Тсч 12 ’
о„
= Тсч/2)/3.
Так
как интервал т неизвестен, то погрешность
Атк
так же, как и АтН|
будет распределена по равновероятному
закону в границах О—Тсч.
Поэтому систематическая составляющая
погрешности и среднее квадратическое
значение случайной составляющей
выразятся, как
Аск(Атк)-W2,
ак=7'сч/2КЗ.
Выражения
для Ас
и о погрешности дискретности начала и
конца совпадают с выражениями (3.21) для
погрешности квантования по значению.
В данном случае также имеет место
процесс квантования. Поскольку измеряемой
величиной является интервал времени,
мы называем ее погрешностью дискретизации
или дискретности.
Суммарная
погрешность дискретности Атд
= Атн—Атк,
очевидно, не будет содержать систематической
погрешности. Поскольку случайные
погрешности А(тн)
и А(тк)
статистически независимы и обе
распределены по симметричному закону
равной вероятности с равными границами
±ТСч/2,
суммарная случайная погрешность будет
распределена по треугольному закону.
Среднее квадратическое значение
°л = Уо* + о* = ТсчГ\/6.
Таким
образом, относительная погрешность
дискретности бтд
представляет собой случайную погрешность,
распределенную по закону треугольника
со средним квадратическим значением
Оо Д = Тт/У 6 т = yg7Jc4T •
Погрешность
дискретности обратно пропорциональна
длительности интервала и прямо
пропорциональна периоду счетных
импульсов. Оценим теперь погрешность
6тг = АТСч/ТСч.
Эта погрешность обусловлена, главным
образом, нестабильностью частоты
генератора счетных импульсов, который
включает в себя высоко- стабильный
генератор с кварцем и формирователь
коротких импульсов. Систематическую
составляющую нестабильности исключают
периодической корректировкой частоты
генератора. Поэтому погрешность бхт
рассматривают как случайную со средним
квад
ратическим
значением, равным среднему 'квадратическому
значению относительной нестабильности
частоты <JtITC4
— <JfIFc4,
распределенную
нормально.
В
результате получаем выражение для
средней квадратической погрешности
/преобразования
Заметим,
что влияние второго слагаемого больше
при преобразовании интервалов времени
большей длительности, а первого — при
преобразовании интервалов малой
дискретности.
АЦГ1
постоянное напряжение — интервал
времени — цифровой код. Рассмотрим
сначала так называемый время-импульсный
АЦП (рис. 4.16,а). Схема работает циклами,
которые задаются управ-

ляющим
устройством. Управление может
осуществляться вручную или
автоматически.
ш
‘I
. С ним сравнивается поступающее на вход измеряемое постоянное напряжениеt/BX.Сравнивающее устройство фиксирует момент равенства этих напряженийt2появлением короткого им-
пульса
uci
на
выходе. Кроме этого, сравнивающее
устройство фиксирует равенство нулю
пилообразного напряжения (момент /з)
также появлением импульса ис2
на выходе. Импульс Mci
перебрасывает
формирователь временного интервала
(триггер) в положение, при котором
временной селектор пропускает
непрерывно поступающие на вход 2
счетные импульсы от генератора Нсч.
Импульс ис2
на выходе сравнивающего устройства,
фиксирующий равенство образцового
пилообразного напряжения нулю, переводит
формирователь в другое состояние,
закрывая тем самым вход / временного
селектора для прохождения счетных
импульсов. Таким образом, на выходе
временного селектора окажется т
импульсов, соответствующих времени т
между двумя состояниями формирователя.
Это время будет равно x—
UBXjv
= mlFt
где
F
—
частота следования счетных импульсов,
v
—
скорость изменения пилообразного
напряжения, В/с, численно равная tga.
Уравнение
преобразования с погрешностью дискретности
имеет вид UBX
= vm/F.
Для
данного преобразователя отношение vjF
= =
const, его
выбирают равным 10й
(к
=
0, 1, 2, ...), так что UBX
— =
10ftm.
Входное
постоянное напряжение 0ВХ
прямо пропорционально числу импульсов
на выходе преобразователя.
Основные
звенья структурной схемы АЦП являлись
предметом изучения в курсе «Импульсные
и цифровые устройства». Здесь же
рассмотрим лишь их основные особенности.
Генератор
пилообразного напряжения
должен вырабатывать линейно изменяющееся
напряжение с коэффициентом нелинейности,
не превышающим (1...2)10-4,
и высокой стабильностью скорости
нарастания напряжения. Для этой цели
часто используются интеграторы на
основе усилителей тока с глубокой
отрицательной обратной связью.
Используются также генераторы, работающие
на принципе заряда конденсатора с
большой постоянной времени.
Сравнивающие
устройства
строят на основе диодных схем. Применяют
также дифференциальные усилители,
состоящие из нескольких каскадов
усиления. На разные входы дифференциального
усилителя подают пилообразное напряжение
и преобразуемое постоянное. При их
равенстве на выходе появляется импульс.
Входное
устройство
предназначается для изменения пределов
входной величины, фильтрации входного
напряжения от фона, переключения
полярности и включает в себя аттенюаторы
и делители напряжения, фильтр нижних
частот и переключатели. Достоинством
рассмотренного АЦП является простота.
Основной
недостаток заключается в том, что
необходимо обеспечить постоянство
скорости нарастания напряжения во
времени. Для этого требуется усложнять
схемные решения, применять тер*
мостатирование, высокую стабилизацию
напряжений. Недостатком является и
низкая помехоустойчивость. Этот
преобразователь преобразует мгновенное
значение напряжения. Из-за наложения
на преобразуемую величину помех
длительность временного интервала
т будет претерпевать случайные отклонения,
которые рассматриваются как погрешность
преобразования.
Погрешность
преобразования может быть оценена из
рассмотрения уравнения преобразования
(4.50) и работы схемы. Реализация
относительной погрешности преобразования
биъ%
может быть записана бUSK=bv—б^+б^пор
+ б^пом+бтд, где bv—
погрешность, обусловленная неточностью
определения и нестабильностью скорости
изменения образцового пилообразного
напряжения; 6F—
погрешность, обусловленная неточностью
определения и нестабильностью частоты
следования счетных импульсо®; бтд
— погрешность
Ип
edpumup
j
Г
Я
я он сравнения
8х
входное
устройство
>д_г
t
|
Ясточнин
образцового напряжения 'Е аЬх>
Формирователь
временного интервана
'
/
JZ
й/dt
±
L |
г -> |
Временной |
|
импульсов |
|
сенентор |
Блон
управления
т
а)
|
иупр |
|
|
|
|
|
Г, |
_ h |
1 t I |
|
X ИНТ |
- - 1 | ||
|
U ХД |
|
1 ! |
1 1 4 1 (. 1 1 |
|
к |
! I\ J ! | ||
|
VTp |
|
1 1 r |
У ‘ 1 1 -43-* |
|
^инт |
j 1 1 1 t ll'linillllllin'llll.. | ||
|
^вх сч |
|
1 1 Illl |
1 1 t 1 1 illl |
дискретности;
б£/Пор
— погрешность, обусловленная порогом
сравнивающего устройства; bUx
—
погрешность формирования временного
интервала, обусловленная помехой.
Границы
общей погрешности преобразования
составляют у практических приборов
±0,1% (например, АЦП вольтметра ВК7-16).
Рассматриваемый
ниже интегрирующий
АЦП с время-им- пульсным преобразованием
свободен от этих
недостатков и является одним из самых
распространенных. Иногда его называют
АЦП с двойным интегрированием. Он
преобразует среднее значение входного
напряжения.
Управляющее
устройство (рис. 4.17,а) вырабатывает
последовательность прямоугольных
импульсов калиброванной длительностью
Т\
с крутыми фронтом и срезом и с длительностью
паузы Т2.
Цикл
преобразования составляет Т
= Т[ + Т2.
Переключатель
S1
фронтом
импульса Т\
переключается в положение 1.
На вход интегратора подается преобразуемое
входное напряжение UBX
и
начинается заряд интегратора этим
напряжением в течение калиброванного
промежутка времени (рис. 4.17,6). В момент
окончания импульса формирователь
временного интервала коротким
отрицательным импульсом переводится
в состояние, при котором временной
селектор начинает пропускать на выход
постоянно поступающие на вход 2
счетные импульсы. Одновременно в
момент окончания управляющего импульса
переключатели S1
и
S2
переходят
в положение 2,
и вход интегратора подключается к
источнику образцового напряжения —
Еобр
обратной полярности. Начиная с этого
момента выходное напряжение интегратора
будет изменяться в обратном направлении
с постоянной скоростью, определяемой
Ео6р.
Когда выходное напряжение интегратора
достигает нуля, на выходе сравнив1ающего
устройства появляется импульс,
который переводит S1
и
S2
в
положение 1.
Этим же импульсом формирователь
временного интервала переходит в
состояние, закрывающее временной
селектор для счетных импульсов. За
время т через временной селектор пройдет
ш
импульсов. Покажем, что число импульсов
m
будет
пропорционально входному напряжению
UBX.
Напряжение
на выходе интегратора по окончании
импульса длительностью Тй
^вых
(Тг)=■^
Fb*
dt
= -j^Uвх
Tv
К
концу полного цикла выходное напряжение
будет
Отсюда,
учитывая, что т =
m/fC4,
VBX
= Eotp%IT\ = E06pmlT\FC4
= cm.
Входное
напряжение оказывается прямо
пропорциональным числу счетных импульсов.
Постоянную с
выбирают равной 10ft,
где
k
—
целое
число. Тогда UBX=lOhm.
Следует
обратить внимание, что величины, входящие
вс — длительность управляющего импульса
Ти
частота следования счетных импульсов
Есч
и постоянное напряжение Е0бр,
сравнительно легко выполнить
высокостабильными во времени. Они
могут быть измерены с высокой точностью.
Исследование
работы АЦП показывает, что наиболее
сильно проявляется помеха с частотой
сети питания /п
= 50Гц. В рассмотренном АЦП высокая
степень подавления сетевой помехи
достигается рациональным выбором
интервала интегрирования «вверх». При
синусоидальной помехе полное подавление
помехи имеет мес
то
при интервале интегрирования Ти
равном или кратном периоду помехи.
Для
уменьшения помехи вход интегратора
переключается в
моменты
прохождения напряжения сети питания
через нуль и в моменты равенства нулю
выходного напряжения интегратора.
Генератор управляющих импульсов для
этого синхронизируется напряжением
сети питания.
Рассмотривая
уравнение преобразования и работу схемы
АЦП с двойным интегрированием, выразим
реализацию общей относительной
погрешности преобразования бUBX
в
виде
bUBX = 6Eo6p+bm—6Т]—6ГСч+ 6|- + 6у + б£/Др + б£/Пор.
где
б£0бр
— погрешность, с которой известно
образцовое напряжение; бт =
6тд—погрешность
дискретности; 67"]—погрешность
определения .и нестабильности длительности
управляющего импульса; бГсч —
погрешность, обусловленная определением
и нестабильностью частоты следования
счетных импульсов; бг=
(Л/Ц— Ат2)/7?—погрешность
из-за изменения переходного сопротивления
ключей ДГ) и Агг; 6y=7’i—T2/2RC(1+K)—погрешность
от нелинейности интегрирования в
обоих тактах (К
— коэффициент усиления УПТ интегратора);
б£Удр—
погрешность, обусловленная дрейфом
нуля УПТ интегратора; bU„op—погрешность,
обусловленная порогом устройства
сравнения.
Модификация
такого АЦП реализована в универсальном
цифровом вольтметре В7-22. Цикл
преобразования в нем начинается с
разряда конденсатора током, пропорциональным
входному напряжению за фиксированное
время (сначала происходит интегрирование
вниз). Затем конденсатор заряжается до
исходного состояния. Интервал времени,
в течение которого конденсатор
заряжается, и является мерой входного
напряжения. В современных АЦП этого
типа используются интегральные схемы.
Погрешность
преобразования при использовании метода
двойного интегрирования менее 0,01%.
Четверть всех выпускаемых вольтметров
основывается на АЦП с двойным
интегрированием.
АЦП
постоянное напряжение — частота. В
качестве входной величины будем
рассматривать, как и ранее, постоянное
напряжение, выходной — частоту.
Поскольку измерение частоты проводится
точнее, а преобразование ее в цифровую
форму осуществляется легче, чем любой
другой величины, в измерительной технике
имеется тенденция сведения измерения
физических величин к измерению
частоты.
АЦП
частотного преобразования строятся
так, что на выходе мы имеем среднее
значение частоты за некоторый установленный
интервал времени. Другими словами, в
АЦП этого типа реализован еще один
вариант интегрального метода
преобразования.
Входное
напряжение должно преобразовываться
в частоту так, чтобы 'зависимость между
ними была линейной ,т. е. f
= KUBx.
Если
напряжение иа входе преобразователя
UBX=?UQ
будет
постоянным, постоянной остается и
чатота f0,
за
какой бы промежуток времени мы ее не
усредняли. При этих условиях в случае
наложения на Uо
периодической симметричной помехи
(например, UBx.
= Uo+Umnsina}t)
среднее
значение частоты за период напряжения
помехи будет равно
/cp
= -^rf/#=-£-
jXt/o+
^1,
sin
сot)dt
= KU0
1
о 1 о
и
fcp=KU0=f0.
Упрощенная
структурная схема преобразователя
показана на рис. 4.18. АЦП работает следующим
образом. На вход иитеграто-
Рис.
4.18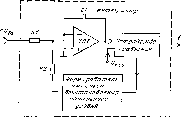
ра
поступает входное напряжение отрицательной
полярности — Ubx■
На выходе интегратора напряжение будет
возрастать прямо пропорционально
абсолютному значению входного напряжения.
Когда напряжение на выходе интегратора,
поступающее на устройство сравнения,
достигнет порогового уровня U„0р,
устройство сравнения вырабатывает
импульс, поступающий на -выход
преобразователя. Одновременно этот
импульс поступает в цепь обратной
связи — на -вход формирователя импульса
восстановления начального уровня.
Формирователем создается одиночный
импульс полярности, противоположной
полярности входного импульса, и такой
амплитуды U0
и
длительности т0,
что при его поступлении на вход интегратора
полностью разряжается конденсатор
интегратора. Напряжение на выходе
интегратора также падает до нулевого
уровня. Таким образом, завершается
полный цикл работы преобразователя,
-после чего все процессы повторяются.
На
выходе преобразователя -создается
последовательность импульсов,
-средняя частота -повторения которых
fcр
будет линейно зависеть от входного
-напряжения UBX-
Приравнивая
количество электричества заряда и
разряда, получаем (т + т0)
= — т0.
Поскольку -т+то = 71
= —, можно за- Ri R2 f
писать
U^-^-U0r0f. (4.29)
А2
Обозначив
число импульсов, поступающих на выход
за некоторый калиброванный промежуток
времени Т0
через пг,
получаем
уравнение
преобразования Цвх
= — — x0m
= am,
где
а
— постоян-
Ra Та
ная
величина.
Как
следует из предыдущего рассмотрения,
UBX
и
m
являются
средними величинами за цикл преобразования.
Из
(4.29) и рассмотрения работы АЦП запишем
реализацию относительных погрешностей
преобразования
бПвх = 6i?i—+ 67'o + 6m. + 6£/nop-
Здесь
6R1
и
6R2
—
погрешности, обусловленные определением
и нестабильностью сопротивлений
резисторов R1
и
R2;
бU0
и
бто — погрешности, связанные с амплитудой
и длительностью импульса формирователя;
бППор
— погрешность, обусловленная порогом
срабатывания устройства сравнения;
бт(бтд)
— погрешность дискретности.
Общая
погрешность определяется в основном
погрешностью, обусловленной нестабильностью
параметров, и составляет 0,01% и меньше,
однако время измерения значительно и
достигает 0,1 с.
АЦП
с частотным преобразованием применяются
в серийных цифровых вольтметрах, например
В7-18, В7-23 и др.
АЦП
поразрядного уравновешивания. АЦП
этого типа, в отличие от ранее
рассмотренных, построены по схеме
уравновешивающего преобразования.
Сущность поразрядного уравновешивания
состоит в
сравнении
входного напряжения с рядом образцовых
напряжений, размеры которых различаются
по определенному закону, например
по закону последовательного расположения
разрядов в двоичной системе счисления.
Число, соответствующее образцовому
напряжению, которым компенсируется
входное постоянное напряжение,
представляет это напряжение в виде
такого кода.
Любое
«-разрядное число N
может
быть представлено в двоичной системе
счисления. Число N
определено,
если определены разрядные коэффициенты
ki,
имеющие
значения 1 или 0.
Задача
формирования дискретных значений
напряжения, соответствующих двоичному
коду, решается с помощью преобразователей
«код — напряжение». Действие их
основывается на использовании «веса»
двоичной единицы в зависимости от
разряда. Вес двоичной единицы
последовательно принимает значения
2°, 21,
22,
23,
24
и т. д. Если каждому разряду поставить
в соответствие напряжение,
пропорциональное весу разряда, то сумма
таких напряжений, набранная с учетом
двоичного кода, будет цифровым
эквивалентом этого суммарного
напряжения и обратно — каждому напряжению
будет соответствовать набор напряжений,
соответствующих двоичному коду.
Пусть коэффициент пропорциональности
между весом разряда и напряжением будет
е.
Тогда сумма напряжений, являющаяся
кодовым эквивалентом аналоговой
величины U,
будет
равна
U
=
е § ki
2‘—1
= ekn
2"-1
+ ekn~i
2п~2
+...
+
ekt
2°.
i=
i
Положив
для примера £/=13 В, а е=1 В, имеем 13 В = 1
-23-1
В-Е +1 - 22-1
В + 0-21-1
В +1 • 2°• 1 В =
8 В
+
4 В
+ 0 В + 1 В.
Рис.
4.19
Структурная
схема преобразования изображена на
рис. 4.19.
Пусть
преобразуемое напряжение подается на
один вход устройства сравнения
(нуль-орган), а на другой его вход
подводится напряжение из образцового
набора, причем подключение начинается
со старшего разряда. В устройстве
сравнения преобразуемое напряжение
сравнивается с образцовым напряжением
или суммой образцовых напряжений. Если
U0ev<Ux,
т.
е. Ux—£/Сбр>0
(мало),
то выходное устройство не будет оказывать
воздействия на управляющее устройство.
Оно продолжает работать циклами и выдает
новый тактовый импульс, подключающий
к предыдущему образцовому напряжению
(или сумме напряжений), напряжение,
соответствующее следующему низшему
разряду. Если и после этого Ux—£/Обр>0,
то
управляющее устройство не будет
реагировать на выходное напряжение
сравнивающего устройства. Следующий
такт прибавляет к сумме образцовых еще
одно напряжение, соответствующее
низшему разряду. Если Ux—£/Обр<0
(велико),
выходное напряжение сравнивающего
устройства действует на управляющее
устройство, которое вырабатывает
импульс, направляемый в блок образцовых
напряжений, и напряжение разряда,
подключенное в данном такте, снимается.
Этот разряд пропускается. Далее в
следующий такт подключается напряжение
следующего за пропущенным более низкого
разряда. Процесс заканчивается после
сравнения входного напряжения с полным
набором образцовых напряжений.
Образцовые напряжения, оставшиеся
включенными ik
моменту
равновесия, дают значения преобразуемого
напряжения в двоичном коде, соответствующие
сигналы поступают на выход АЦП.
Поразрядное
уравновешивание часто осуществляют на
основе двоично-десятичной системы
счисления. Применение двоичной и
двоично-десятичной системы счисления
наиболее целесообразно, поскольку в
этом случае число тактов уравновешивания
оказывается наименьшим среди прочих
систем счисления. Заметим, что применение
двоичного кода позволяет примерно на
20% уменьшить время обработки компенсирующего
напряжения по сравнению с двоичнондесятичным.
Реализацию
относительной погрешности преобразования
можно выразить в виде
(б^вх = 6t/o6p + 6t/ пор + 6П к +бП ПОМ»
где
6£/обр
— погрешность, появляющаяся из-за
неточной подгонки образцовых напряжений
и их нестабильности; бНПОр—
погрешность, обусловленная порогом
сравнения и его нестабильностью во
времени; бUK
—
погрешность квантования; бUn0M
—
погрешность из-за помехи.
Поскольку
АЦП рассматриваемого типа преобразует
мгновенные значения входного
напряжения, а не средние, они подвержены
воздействию помех. Несомненным
достоинством таких АЦП является высокое
'быстродействие. Они выполняются на
больших интегральных схемах (например,
БИС серии 252 и 230). АЦП поразрядного
уравновешивания имеют погрешность
примерно 0,1%, быстродействие их — 104
циклов в секунду.
ЦИФРО-АНАЛОГОВЫЕ ПРЕОБРАЗОВАТЕЛИ
Цифро-аналоговые
преобразователи (ЦАП)—это устройства,
осуществляющие преобразование входных
величин, представленных числовыми
кодами, в эквивалентные им значения
какой-либо физической величины, выраженной
в аналоговой форме. ЦАП часто
устанавливают в цепи обратной связи
.цифровых измерительных приборов для
преобразования дискретизированной
величины в аналоговую, однородную с
измеряемой.
Коды
N
наиболее
часто представлены в двоичной,
двоичнодесятичной и десятичной
системах счисления. Выходные величины
представляют собой напряжения (токи),
временные интервалы, частоту.
Уравнение
преобразования ЦАП можно выразить в
виде xn=$N,
где
N
—■
числовое значение «ода, р — коэффициент
преобразования, xn
—
выходная величина.
Если
выходная величина представляет собой
напряжение, а Umax
и
N
max —
максимальные значения выходного
напряжения и соответствующее ему
значение кода, то р = Umax/Nmax
= AUK,
где
AUK
—
шаг квантования. Для обеспечения высокой
точности прибора шаг квантования
должен быть постоянен во всем диапазоне
изменения N.
При
входном двоичном коде, учитывая, что
Nmax
= =
2"—1«=2П,
где п
— число разрядов, выходное напряжение
можно записать в виде:
^вых = ^ 2 ь 2‘-1 = итах 2 kt 2-<—•
N max 2" ЦI <=1
Выходное
напряжение представлено суммой п
слагаемых. Здесь: i
—
номер разряда, а ^е{0, 1} — двоичное значение
i-ro
разряда.
Основными
параметрами ЦАП является быстродействие,
точность и число каналов.
Под
быстродействием понимается максимальная
частота поступления на вход декодируемых
чисел, при которой сохраняется номинальная
точность преобразования. Точность
преобразования характеризуется
относительной погрешностью преобразования,
которая включает в себя статические
и динамические составляющие. Число
каналов определяется по входу и выходу;
для входа оно равно числу источников
цифровой информации, подключенных к
преобразователю, для выхода — числу
приемников информации в аналоговой
форме.
По
принципу действия различают накапливающие,
время-им- пульсные и весовые ЦАП. ЦАП с
накапливающими емкостями основаны на
заряде конденсатора импульсами
образцового напряжения. Управление
зарядом емкости осуществляется кодовым
регистром, на котором хранится число
N.
При
этом заряд осуществляется
последовательностью импульсов постоянной
величины, число которых равно исходному
коду.
Рассмотрим
принцип действия время-импульсного
преобразователя цифровой код —
среднее значение напряжения. Пусть
управление выходным средним
напряжением, пропорциональным входному
коду N,
будет
происходить изменением длительности
импульсов при сохранении неизменными
амплитуды и частоты следования импульсной
последовательности. Структурная схема
ЦАП показана на рис. 4.20,а.
На
схему поступает последовательность
импульсов постоянной амплитуды с
периодом повторения Т0.
Счетчик PCI
после
набора числа Nн
.в момент Ч генерирует импульс, который
используется для периодического сброса
всех декад счетчика на нуль через
интервалы времени 7’Ц
= А„7’0.
Этим же импульсом запускается формирователь
импульсов с амплитудой, равной образцовому
напряжению U0.
Преобразуемый цифровой код N
поступает
на вход устройства сравнения кодов; на
другой его вход поступает текущее
значение кода на соответствующих
разрядах счетчика. При равенстве кодов
в момент устройство сравнения кодов
выдает импульс, который запирает
формирователь импульсов (рис. 4.20,6).
Длительность импульса, выданного
формирователем за время U—1\,
очевидно,
равна NT0.
Тогда
среднее значение напряжения на выходе
ФНЧ будет равно 104
Рис
4.20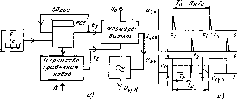
Ucvn = Uo^- = U0^— = N-^ = N&Uk, (4.55)
cv" 0 Гц °(NST0 Na
где
А£/к—
шаг
квантования, N
— текущее
значение преобразуемого входного
кода.
Исследования
показывают, что существенное влияние
на точность преобразования оказывает
температурная нестабильность фронтов
переключения электронных ключей. Поэтому
длительность цикла выбирают не менее
5 мс. Отметим, что основная погрешность
ЦАП составляет 0,1...0,3%.
Рассмотрим
теперь принцип действия ЦАП весового
типа. Упрощенная структурная схема
показана на рис. 4.21. Пусть входной
двоичный параллельный код N
поступает
на входы разрядных триггеров Tl,
Т2,...,
Тп
после установки триггеров в нулевое
состояние по входу. Триггеры
используются для хранения входного
кода на время преобразования или
использования выходного напряжения
ЦВЫх.
Выходные сигналы триггеров управляют
двухпозиционными ключами SI,
S2
Sn
в
разрядах преобразователя.
Выход
каждого ключа соединен с весовым
резистором, сопротивление которого
выбирается в зависимости от номера
разряда i
следующим
образом: Ri
= R-2rt~i+l.
Если
в г-м разряде кода будет 1, то ключ Si
подсоединит
резистор Ri
к
источнику эталонного напряжения Е\
если же в данном разряде будет 0, то ключ
подсоединит этот резистор к точке
нулевого потенциала. В схеме применен
УПТ с параллельной обратной связью,
имеющий большое входное сопротивление,
так что входной ток УПТ близок к нулю.
Рассмотрим процесс образования выходного
напряжения ивых.
Пусть ключи соединены так, мак показано
на рис. 4.21.
Запишем
уравнения Кирхгофа:
= Е
=
R]i]
+i?ocife+T/Bux',
£
=
-/?212
+ Еос£ь + Т/вых,
а
также уравнение —UBUX
— KUBX=(R0cik+UBX).
Выражая
токи t’i,
t'2,
h
из
последних трех уравнений и подставляя
их
значения в первое, получаем
Рис.
4.21 Е
К
вых
'““I /?1 ' я2
При /С^>1 можно принять
(1
+К)/К
да 1,
(^sss)^±Bl^o.
\
К ) RiRz
Тогда
имеем
R°C
f *i +
R*
{U™X
+
*°С
h)
RrX*
}
'
V
R1 R
2
Для
л суммируемых напряжений
^Bblt Ясс |
!
Е
1
+к
U
DM Т
Roc
|
/?0С
\ Ri
R%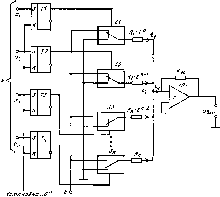
i+l
о»
i=\
KiSi
2
Roc-E
у
k,
2-("-o-i = — £iV.
Я д
i—i
Таким
образом, мгновенное выходное напряжение
пропорционально коду.
Развитие
схемы рис. 4.21 позволяет получить схемы
с матрицами сопротивлений, состоящие
из п
одинаковых каскадов и.
удобные
ib
изготовлении
на основе интегральной технологии. В
настоящее время ЦАП выполняются на
интегральных схемах. Основная погрешность
ЦАП не превышает .десятых долей процента.
ЦИФРОВЫЕ ОТСЧЕТНЫЕ УСТРОЙСТВА
В
цифровых измерительных приборах
используются цифровые отсчетные
устройства, в которых результат измерения
представляется непосредственно в
цифровой форме в обычной для наблюдателя
десятичной системе счисления.
Независимо
от типа цифровых отсчетных устройств
они должны содержать регистрационный
регистр для запоминания результата
измерения, преобразователь код-код для
получения кода, пригодного для управления
цифровым индикатором (дешифратор), и
цифровые
индикаторы, nia
которых
получаются изображения цифр.
По
способу вывода информации из преобразователя
код-код на цифровые индикаторы цифровые
отсчетные устройства разделяют на
статические и динамические. В статических
— информация на индикаторы поступает
параллельно, так что для каждого
десятичного разряда индикатора требуется
свой преобразователь кода и свое
согласующее устройство. Такое построение
требует большого числа элементов. Его
целесообразно применять для малоразрядных
цифровых измерительных приборов. В
динамических цифровых отсчетных
устройствах для сокращения числа
элементов и соединений пространственное
разделение каналов заменяется временным
разделением. Инерционные свойства
зрительной системы человека позволяют
последовательно подавать информацию
на индикаторы. До последнего времени
наибольшее распространение в цифровой
измерительной технике имели газоразрядные
индикаторы. Однако широкое использование
интегральных схем потребовало
создания цифровых индикаторов с малым
напряжением управления и малой
потребляемой мощностью.
Цифровые
индикаторы. Принцип действия знаковых
газоразрядных
индикаторов
основан на использовании свечения
стеклян- го разряда. Одна из конструкций
представляет собой стеклянный баллон,
внутри которого расположен набор из
десяти стеклянных трубочек, изогнутых
в виде цифр и наполненных газом, например
неоном. При подаче напряжения с выхода
дешифратора на электрод, связанный
с трубкой, в газе возникает тлеющий
разряд и цифра светится. Цифры наблюдаются
с торца баллона лампы.
В
другой конструкции газоразрядного
индикатора (рис. 4.22,а)
проволочные
катоды имеют форму арабских цифр от 0
до 9 и расположены пакетом в баллоне,
заполненном неоном. При подаче напряжения
с выхода управляющей схемы между общим
сетчатым анодом и катодом возникает
тлеющий разряд, свечение покрывает
соответствующий катод. Светящаяся цифра
наблюдается с торца
Лнод
г-
- а)
Слои
poctpama
дето
- диоды
да
mod
*
да
mod Сетка Л
моды Оснодание
Роляроидная д)
Стеклянная
пластина
Стенло
\
Сегменты
осноЗанкя 4
канала
Здидкие кристаллы ej
Зерна
ль ный_
\
злентpod
Металл Излучакощие выдоды
дамка
кристаллы
в) г) gj
Рис.
4.22


баллона.
Применяются также газоразрядные
индикаторы с боковым расположением
цифр.
Газоразрядные
индикаторы выпускаются также в виде
так называемой газоразрядной панели,
представляющей собой плоскую
конструкцию с керамическим основанием,
на которое нанесены металлические
сегменты-катоды. Стеклянная крышка с
напыленными прозрачными анодами
закрывает конструкцию.
В
настоящее время газоразрядные цифровые
индикаторы изготавливаются в виде
сегментных панелей плоской конструкции
на большое число знакомест, а также в
виде матричных двухкоординатных
индикаторов.
Газоразрядные
индикаторы управляются сравнительно
высоким напряжением (100 ...300 В), что
необходимо для обеспечения зажигания
и поддержания тлеющего разряда. Высокое
управляющее напряжение затрудняет
использование газоразрядных индикаторов
с интегральными микросхемами.
Вакуумные
катодолюминесцентные индикаторы
представляют собой двух- или трехэлектродные
приборы, содержащие прямонакальный
катод, управляющую сетку и аноды-сегменты,
покрытые низковольтным люминофором
(рис. 4.22,6). Такие индикаторы выпускаются
однознаковыми и многознаковыми,
цилиндрической и плоской формы. Низкое
питающее напряжение, малая потребляемая
мощность делают их наиболее перспективными
для использования в цифровой
измерительной технике.
В
электролюминесцентных
индикаторах на стеклянную пластинку
наносится проводящий прозрачный слой.
Этот слой, служащий одним общим
электродом, покрывается тонким слоем
фосфора (несколько микрометров),
который является диэлектриком. На
пленку фосфора накладывается тонкая
металлическая пленка,
которой
с помощью трафарета придается определенная
форма, например в виде 7 или 9 элементов,
комбинация которых дает цифры от 0 до
9. Каждый из этих металлических элементов
имеет отвод и служит вторым электродом
(рис. 4.22,в).
При подаче постоянного или переменного
напряжения между общим электродом и
определенными элементами, образующими
цифру, изменяется напряженность поля
в фосфоре, что вызывает его свечение.
От величины и частоты питающего
напряжения зависит цвет и яркость
свечения.
Полупроводниковые
индикаторы
(инжекционные светодиоды)^ используют
свечение р-п-перехода при инжекции
носителей; выпускаются, как правило,
одноразрядными, цифры формируются из
семи сегментов.
Полупроводниковые
индикаторы обладают высокой яркостью
свечения, нелинейной вольт-амперной
характеристикой и нелинейной
зависимостью силы света от плотности
тока.
Цифровые
индикаторы представляют собой
интегральную схему из светодиодных
структур и необходимых электрических
соединений, выполненных средствами
микроэлектроники (рис. 4.22, г).
Для
изготовления цифровых индикаторов на
основе светодиодов применяют
полупроводниковые материалы GaP,
GaAlAs, GaAsP, SiC, из
которых получают структуру различного
свечения — от красного до зеленого.
Жидкокристаллические
индикаторы
(рис. 4.22,д)
работают на принципе изменения оптических
свойств некоторых органических
соединений под воздействием электрического
напряжения. Различают два типа
индикаторов: с изменением показателя
преломления и с изменением коэффициента
поляризации. Эти индикаторы являются
пассивными индикаторами, поскольку
работают в отраженном свете и
управляются электрическим полем. Они
потребляют очень мало энергии.
Поэтому используются в переносных
устройствах. Недостатком является
низкая яркость и контрастность, а также
ограниченный диапазон рабочих температур.
Накальный
индикатор
состоит из ряда накальных вольфрамовых
нитей, расположенных в вакуумном
промежутке в виде сегментных знаков
(рис. 4.22,е).
Высокая яркость, недостижимая в других
видах индикаторов, позволяет применять
эти индикаторы в системах, которые
работают при сильной солнечной засветке.
Недостатком следует считать малое
внутреннее сопротивление, определяющее
повышенные требования к управляющим
схемам.
Преобразователи
код-код. В цифровых измерительных
приборах используются несколько
разновидностей кодов, имеющих различные
свойства и области применения. Для
преобразования одного кода в другой
применяют преобразователи кодов.
Любой
преобразователь код-код может быть
представлен схемой с п
входами для входных кодовых сигналов
Х\,
х2,
..., хп
и
пг
выходами с выходными кодовыми сигналами
уи
г/2,
..., ут.
Работа
такой схемы может быть описана таблицей
соответствия входных и выходных
сигналов. Кодовые сигналы на выходе
схе-
мы
являются функциями кодовых сигналов
на входе схемы: yi
= fi{x,,
*2, хп),
i=l,
2,
т.
Кодовые
сигналы на входе и выходе схемы
отождествляются с цифрами 0 и 1. Такие
функции называются переключательными
или булевыми (по имени ирландского
математика Дж. Буля).
Для
задания переключательной функции
необходимо указать ее значения при
всех 2" кодовых входных сигналах, так
как на каждом из них функция может
принимать два значения 0 или 1, то число
функций, зависящих от п
аргументов, равно 22К
Для одного аргумента понадобится
система четырех функций, для двух —
шестнадцати и т. д. Однако известно, что
отдельные функции могут быть
представлены как суперпозиции других.
Система функций, при помощи которой
путем суперпозиции можно получить
любую сколь угодно сложную переключательную
функцию, называется функционально
полной системой.
Основной
функционально полной системой является
система переключательных функций, в
которую входят: логическое сложение
XiVх2,
логическое умножение ххх2
и логическое отрицание х.
Эта система получила название булевой
алгебры. Основы булевой алгебры
изучались в курсе «Импульсные и цифровые
устройства». Поэтому не будем
повторять основные теоремы булевой
алгебры. Укажем только, что аппарат
булевой алгебры позволяет получить
схему реализации переключательных
функций на основе использования
логических элементов, И, ИЛИ, НЕ.
Для
управления цифровыми индикаторами в
цифровых измерительных приборах
первичные коды — единичный или
двоично-десятичные с весами 2, 4, 2, 1
или 8, 4, 2, 1 — преобразуются в
единично-десятичный код (при
использовании индикаторов с 10 отдельными
цифрами), либо в семерично-десятичный
код (при использовании 7-сегментного
десятичного индикатора).
Рассмотрим
кратко реализацию двоично-десятичного
кода в семерично-десятичный.
Таблица
соответствия для данного преобразователя
(рис. 4.23) составлена с учетом рисунка
сегментов. От таблицы переходят к
алгебраической форме записи функции.
Для этого для каждого набора входного
кода, на котором функция равна единице,
записывается элементарное произведение
всех аргументов, причём если аргумент
в этом наборе принимает значение 0, то
пишется его отрицание. Затем происходит
логическое сложение этих элементарных
произведений.
С
учетом сказанного выходной сигнал для
управления первым сегментом представляется
функцией фь которая в нормальной
дизъюнктивной форме будет иметь вид:
]\=Х\Х2ХъхУ]Х\Х2ХъХ^ХхХ2ХЪХ^
У Х\Х2хъХ±У Х\Х2ХъХ^у ххх2х?,хь\/
\J X\X2X2Xa\J Х\Х2Х'&Х/х.
После
минимизации имеем:
Входной
к од No
(g
Входной
нодмо/'г,й,г,1)
выходной
семисегментный под No(7)
Знак
х,
хг
Xj
х4
X,
Ххг
х3
Х4
fi
fe
fz
f7
fs
fi
Л
г}
г2
г1
?
г1
2г
21
2°
а
б
в
г
д
е
ж
О
о
о
О
о
О
О
О
1
7
7
О
1
1
1
О
а
/—
О
О
О
7
О
О
7
О
О
1
О
1
0
0
1
0
0
О
7
О
1
0
7
7
1
О
1
2
0
0
1
7
0
0
7
1
7
0
1
7
0
7
1
3
7?П
[\е
0
7
0
0
0
1
0
О
0
1
1
7
0
7
0
4,
0
1
0
1
1
О
7
1
1
7
0
1
0
7
7
5
ж
О
7
1
О
1
1
О
О
7
7
О
7
7
7
7
6
0
7
1
1
1
1
О
1
7
0
7
0
0
7
0
7
1
0
и
0
1
1
1
0
7
7
7
7
1
1
1
в
1
0
0
1
1
1
1
1
7
1
7
7
О
1
1
9
1
0
7
0
-
-
-
-
0
0
0
0'
0
0
Гашение
Рис.
4.23
v
о
о
г
о
тгП
Цдр
ц—
с
/i=*iV
х3\/х2х4\/х2х4. (4.56)
Аналогично
могут быть записаны функции
h = X2\/ XzXiSJ Х3Хь
Н = Х3\/ Х2\/Х4,
/
4=*3*4
\/м V *зМ V х2х3
\/х2х3х4, (4.57)
fb = X2X4\/X 3X4,
f6 = xi\/x3xi\/x2x4\/x2x4,
Xi\J Х3Х2\/ Х2Х3\/Х2Х->,.
Данную
систему функции можно представить
схемой, использующей логические
элементы. Схема преобразования
двоично-десятичного кода .V (8421) в
семерично-десятичный Л'(7-10) показана
на рис. 4.24.
Технически
эта логическая схема может быть
реализована очень многими способами,
так же как и сами логические элементы.
Некоторые из них рассматривались в
курсе «Основы импульсной и цифровой
техники». Прежде всего, это диодные
матрицы.
Серийно
выпускается ряд интегральных схем,
позволяющих управлять работой цифровых
индикаторов. Например, для управления
катодолюминесцентными 7-сегментными
индикаторами применяются преобразователи
кодов на основе интегральной микросхемы
К161ПР2. Микросхема содержит индикационный
регистр из пяти триггеров для запоминания
двоично-десятичного кода и сигнала
запятой, преобразователь кодов и восемь
транзисторов для управления анодными
токами. Одна микросхема обеспечивает
один десятичный разряд. Схема включения
микросхемы
111
Рис. 4.24
хг . X*
I
к
ЕЬч
&
£
£
t*
v>
I
*
&
J
m
0~B
Bn
ff
^
>~
I
'b
\
к
44
5S
I
л
х3
**4
J
I
X1
'
|^>
■
•
I
*+■
х3
'
4*'
I
xs
■
Xf
XZ
■
К161ПР2
для управления семисегментными
цифровыми катодолюминесцентными
индикаторами серии ИВ в статическом
режиме приведена на рис. 4.25.
Выпускаются
микросхемы для управления цифровыми
индикаторами также других типов:
К176ИЕ4 — жидкокристаллическими,
К155ИД1— газоразрядными,
К314ИД1
— полупроводниковыми.
При
числе разрядов, не превышающем 3-4,
применяются только статические
схемы управления индикаторами.