

ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
-определении линий пересечения Рτ с касательными плоскостями к передней поверхности для определения γ и соответственно к задней для α;
-определение значений углов γ и α в секущей плоскости в рассмат-
риваемой системе координат.
Эта методика является общей для графических и аналитических способов определения передних и задних углов в той или иной координатной плоскости.
Определения и положения стандарта "Обработка резанием" [3] являются основой методики определения и других параметров рабочей части инструментов.
Так угол в плане ϕ определен как угол между плоскостью резания Рn и рабочей плоскостью Рs в основной плоскости Рv. Изменение положения указанных плоскостей приводит к изменению определения угла ϕ. Таким образом методика определения угла в плане в рассматриваемой точке режущей кромки в соответствующей системе координат состоит в:
-определении плоскости резания Рn в рассматриваемой точке режущей кромки:
-определение в рассматриваемой точке режущей кромки рабочей
плоскости Рs как плоскости, в которой расположены скорость главного движения и скорость движения подачи;
-определение в соответствующий системе координат линий пересечения основной плоскости Рv с плоскостями Рn и Рs;
-определение угла в плане в основной плоскости Рv.
По аналогии можно представить методики определения и других параметров режущей части инструмента.
Рассмотренные методики позволяют решать задачи определения геометрических параметров в любой точке режущей кромки того или иного инструмента в различных системах координат.
Эти методики представляют собой основу общей теории определения геометрических параметров любого инструмента и служат алгоритмами для разработки в теории проектирования инструмента на ЭВМ подсистемы "Определение геометрических параметров инструмента".
Рассмотрим пример использования данных методик при рассмотрении геометрии передней поверхности спирального сверла.
Геометрия передней поверхности сверла
Передняя поверхность сверла является винтовой поверхностью, угол наклона которой на наружном диаметре сверла равный ω, выбирается при конструировании инструмента. В произвольном цилиндрическом сечении, концентричном оси сверла, угол наклона ωх, соответствующий винтовой
7
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
линии, расположенной на винтовой поверхности равен
tgωx = RRx tgω
где Rx – радиус рассматриваемой точки режущей кромки; R – радиус сверла.
При анализе геометрии режущей части сверла наиболее часто рассматривается статическая система координат.
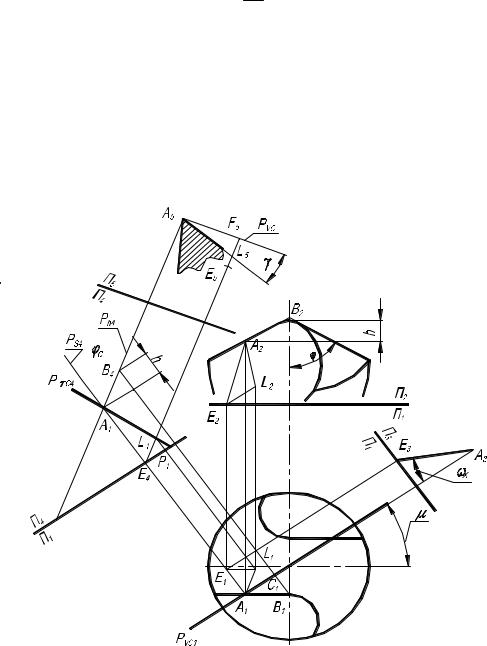
Определим статический передний угол γс в статической системе координат в исследуемой точке А режущей кромки (рис. 1).
Согласно предложенной методике рассмотрим направление скорости главного движения в точке А, которое определяется вектором V.
Рисунок 1 – Определение статических переднего угла и угла в плане
Плоскость, касательная в точке А режущей кромки к передней поверхности, определяется двумя прямыми: режущей кромкой АВ и прямой АЕ, касательной к винтовой поверхности в точке А. Прямая АЕ лежит в плоскости, касательной к цилиндрическому сечению, концентричному оси сверла, в котором угол наклона соответствующей винтовой линии равен ωх. В истинную величину угол ωх проецируется на плоскость П3. Зная проекции точки А в системе плоскостей проекции П1/П2, по правилу перемены
8
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
плоскостей проекций, находится проекция А3 точки А на плоскость П3. При известном угле ωх изобразив положение прямой АЕ в системе П1/П2, находятся проекции А1Е1 и А2Е2 прямой АЕ в системе П1/П2.
Определяем положение основной плоскости Рvc в точке А, как плоскости перпендикулярной направлению скорости V главного движения в точке А. Вводится система плоскостей проекций П1/П4. Плоскость П4 проводится параллельно основной плоскости Рvc. Определяется проекция А4В4 режущей кромки АВ на плоскость П4, которая характеризует величину угла в плане ϕс. Проводится через точку А статическая главная секущая плоскость Рτс. Находится линия АL пересечения передней плоскости и главной статической секущей плоскости Рτс. Передняя плоскость в этом случае задается двумя параллельными прямыми АВ и ЕL. Прямая АВ пересекается с плоскостью Рτс в точке А, а прямая ЕL пересекается с плоскостью Рτс в точке L. Прямая АL определяет величину статического переднего угла γ, который измеряется в плоскости Рτс . Вводится система плоскостей проекций П4/П5. Плоскость П5 проводится параллельно плоскости Рτс . На плоскость П5 в истинную величину проецируется передний угол γ, заключенный между проекцией А5L5 и основной плоскостью Рvc.
Анализируя графическое решение будем иметь
|
|
|
tgγ = |
F5L5 |
|
|
|
||
|
|
A F |
|
||||||
|
|
|
|
|
|
||||
|
|
5 |
5 |
|
|
|
|||
|
|
|
A4L4 = A5F5= A4E4 sinϕc |
|
|||||
|
|
|
F5E5 = A1E1 = A4E4 tgωx |
|
|||||
|
|
|
E4L4 = A4E4 cosϕc |
|
|||||
E4P4 |
= E4L4 sinϕc = A4E4 cosϕc sinϕc |
|
|||||||
L5E5 |
= E4P4 tgµ = A4E4 cosϕc sinϕc tgµ |
|
|||||||
F5L5 = F5E5 − L5E5 = A4E4 tgωx − A4E4 tgµ cosϕc sinϕc |
|
||||||||
Таким образом: |
|
|
A4E4tgωx − A4E4 tgµ cosϕc sinϕc |
|
|
||||
tgγc |
= |
|
|
|
|||||
|
A4E4 sinϕc |
|
|||||||
Отсюда |
|
|
|
||||||
|
|
|
tgωx |
|
|
|
|
||
|
|
|
tgγc = |
− tgµ cosϕc |
(1) |
||||
|
|
|
sinϕc |
||||||
|
|
|
|
|
|
|
|
||
Для определения значений статического переднего угла γ в любой из точек режущей кромки необходимо знать значение угла µ и величину главного угла в плане ϕс в исследуемой точке режущей кромки.
Значение угла µ определяется соотношением
9
ISBN 966-7851-19-2 Надійність інструменту та оптимізація технологічних систем. №14 2003.
sin µ = Rrx
где r – радиус сердцевины сверла.
Анализ зависимости (1) показывает, что при малых значениях угла наклона винтовой канавки ωх в рассматриваемой точке режущей кромки статические передние углы γс у спиральных сверл отрицательны.
Определим величину угла в плане ϕс в точке А в соответствии с принятой методикой. в системе П1/П4 проводим рабочую плоскость Рs угол между следом Рs4 и проекцией А4В4 режущей кромки будет углом ϕс, который в истинную величину проецируется на плоскость П4.
Рассматривая графическое решение будем иметь
tg ϕc |
= |
A1C1 |
|
|
h |
|
|||
|
|
|
||
A1B1 = h tgϕ |
|
|||
A1C1 = A1B1 cosµ = h tgϕ cosµ |
|
|||
Отсюда |
|
|
|
|
tgϕc |
= tgϕ cosµ |
(2) |
||
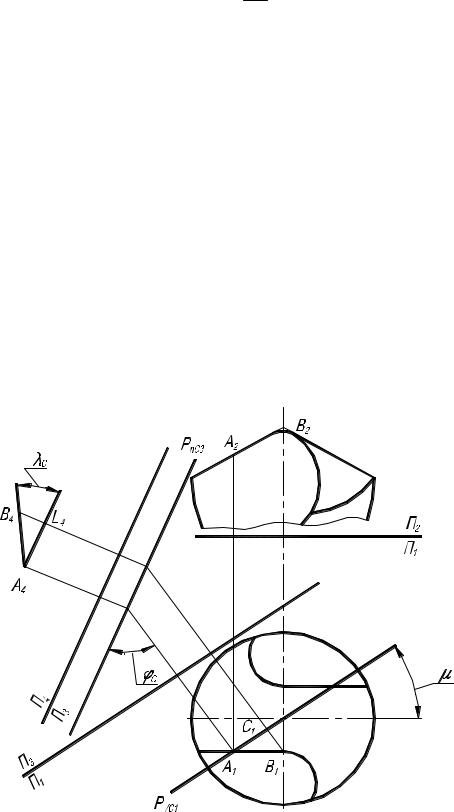
Определим статический угол наклона режущей кромки λс (рис. 2).
Рисунок 2 – Определение статического угла наклона режущей кромки
10