

Томский политехнический университет
Кафедра теоретической и прикладной механики
КУРСОВОЙ ПРОЕКТ ПО ТЕОРИИ МЕХАНИЗМОВ И МАШИН
Студенту Машиностроительного факультет, группа 4А12 Султанову А.В.
КУЛАЧКОВЫЙ МЕХАНИЗМ
Определение наименьшего размера и построение профиля кулачка
Задание № 6
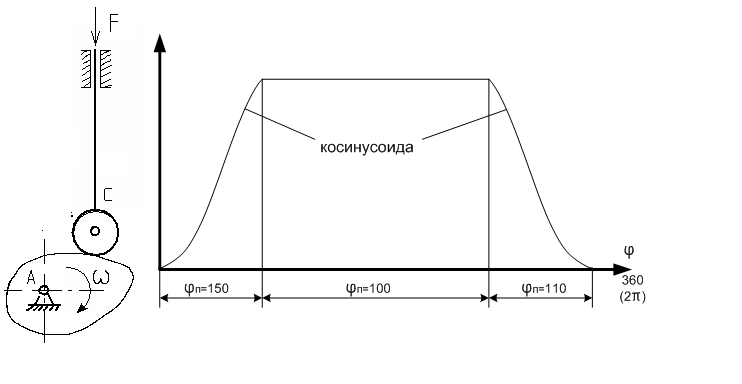
Схема механизма
Исходные данные:
Ход толкателя……………………………………………………………………………………………………………………………………………..Sc=48мм
Минимальные углы передачи движения: при подъёме …………………..……………………γпmin, град =55
при отпускании…………………………..……………. γomin, град =30
полезное усилие, преодолеваемое толкателем …………………………………………………………………………F=440H
Частота вращения кулачка……………………………………………………………………………………………………………….. n=60 об/мин
Дополнительные условия: d=45мм
Дата выдачи задания:
Срок выполнения:
Руководитель: доцент Горбенко В.Т.
3. Кулачковый механизм
(Лист 3)
3.1 Синтез и анализ кулачкового механизма
Одним из основных достоинств кулачкового механизма является лёгкость синтеза, т.е. получение профиля кулачка с большой степенью точности удовлетворяющему заданному закону движения ведомого звена (толкателя).
Целью данной работы является приобретение навыков в определении радиуса ролика, профилирование и силовом расчёте кулачкового механизма.
3.2 Определение размеров, профилирование кулачкового механизма
Вычерчивается
в масштабе график: Sc=Sc(![]() ).
).
Принимаем
линейный масштаб перемещения
![]() =0,5
(мм/мм).
=0,5
(мм/мм).
Тогда высота графика h будет [5, стр.14]:
![]()
![]()
Определяем угловой масштаб [5, стр.14]:
![]() ,
1/мм.
,
1/мм.
![]() 1/мм.
1/мм.
При заданной частоте вращения кулачка n об/мин определяем масштаб времени [5, стр.14]:
![]() с/мм,
с/мм,
где L – длина графика S - (принимается в зависимости от формата чертежа).
![]()
3.2.1 Масштабы графиков первой производной
Приняв
полюсное расстояние H,
методом графического дифференцирования
(метод касательных или метод хорд)
строятся графики первой производной
![]() или
или
![]() -
аналоги cкоростей.
Масштабы графиков: [5, стр.15]:
-
аналоги cкоростей.
Масштабы графиков: [5, стр.15]:
![]() ,
,
где
![]()
![]() ММ
ММ
Масштабы линейных и скоростей этих графиков определяется из выражений [5, стр.15]:
![]()
![]() ,
,
![]()
3.2.2. На основании графиков S | -φ определяется значения отрезков z по формуле и строится график zi=zi(S) в прямоугольной системе координат и выбираем наименьший радиус кулочка
При построение этих графиков следует иметь в виду, что направление отрезков Z определяется по следующему правилу: необходимо вектор скорости толкателя повернуть на 90 o,в сторону вращения кулачка. По заданным углам давления или углам передачи движения находится область возможных положений центра вращения кулачка и определяются размеры кулачкового механизма: радиус кулачка, Для нахождения области возможных положений центра вращения кулачка под заданными углами передачи движения на фазах подъёма и опускания проводятся касательные к графику zi=zi(φ) (из графика romin = 15мм,) величина смещения(e=7мм), расстояние между центрами вращения кулачка и коромысла.
Тогда радиус ролика будет в соответствии с методикой изложенной в [5, стр. 4-5]; в данном случае начальный радиус центрового профиля ro больше радиуса профиля кулачка pmin, поэтому
rp=(0,4…..0,5)ro=(0,4…...0,5) ·15 =6мм