

1491
.pdfУДК 62-523.3
МЕТОДОЛОГИЯ ПОСТРОЕНИЯ АДАПТИВНЫХ РЕГУЛЯТОРОВ С ЭКЗОМОДЕЛЬЮ ДЛЯ РУЛЕВЫХ ЭЛЕКТРОГИДРОПРИВОДОВ
В.Е. Кузнецов
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Исследованы возможности подавления влияния априорной неопределенности и нелинейных факторов в рулевой следящей системе с помощью адаптивного управления, синтезированного методом функций Ляпунова на основе экзомодели. Отмечается диссипативность по адаптации и наличие форсировки адаптивного сигнала, степень диссипативности определяется порядком быстрых динамик в системе. Приводится пример рулевой следящей системы с результатами практических исследований.
Ключевые слова: адаптивное управление, экзомодель, настраиваемая модель, следящий электрогидропривод.
METHODOLOGY OF CONSTRUCTION OF ADAPTIVE CONTROLLER WITH EХO MODEL FOR STEERING ELECTRIC HYDRODRIVE
V.E. Kuznetsov
Saint Petersburg Electrotechnical University “LETI”
Investigation of the possibility of suppressing the influence of a priori uncertainty and nonlinear factors in the steering servo system using adaptive control, synthesized by the method of Lyapunov functions based on exo model is discussed. Dissipative adaptation and presence of adaptive signal boost, order of which is determined by the order of fastest system dynamic are noted. An example of a steering servo system with the results of practical research is given in detail.
Keywords: adaptive control, exo model, adjustable model, electric hydraulic servo drive.
При построении управления техническим объектом обычно исходят из того, что его математическая модель, вопервых, корректно описывает его поведение, а во-вторых, заранее известна. Однако в реальности это не всегда так, практически любая модель представляет собой идеализированное (т.е. упрощенное) описание реального объекта. Кроме того, некоторые характеристики объекта могут быть заранее неизвестными или значительно меняться в процессе его функционирования. Будем говорить об априорной неопределенности объекта, имея в виду прежде всего параметрическую неопределенность объекта. Кроме того, будем рассматривать структурные возмущения, обусловленные наличием неучтенной динамики или динамических подсистем с малыми параметрами, а
также внешние факторы в виде возмущающих воздействий.
Рассматриваются системы позиционирования, включающие в себя следующие особенности:
–Полоса пропускания следящей системы на порядок меньше, чем полоса пропускания входящих в нее звеньев (инерционных или колебательных), определяющих быстрые процессы электрической, механической и гидравлической природы.
–Имеются трудности при составлении модели ввиду отсутствия возможности на практике прямого измерения некоторых параметров динамических процессов системы [1].
Рассматривается технический объект с одним входом Х и одним выходом Y в виде нелинейной следящей системы
81
со структурной схемой, изображенной на рис. 1, где D() – «функциональная
добротность» как зависимость от режимных условий работы, которая может быть выражена через коэффициент гармонической линеаризации; M (s) =
= s p +a s p−1 + +a , |
N (s) = sk + |
|||
|
1 |
|
0 |
|
+ b sk −1 |
+ |
+b |
– полиномы числителя и |
|
1 |
|
0 |
|
|
знаменателя соответственно, где k ≥ p.
Рис. 1. Схема технического объекта – следящей системы
Для синтеза адаптивного управления этим техническим объектом используется подход на основе использования экзомодели.
Под термином «экзомодель» понимается модель системы, определяющая функции для взаимодействия между реальными процессами системы и целесообразного описания представления процессов неопределенных фрагментов системы. Для указанных особенностей технического объекта нетрудно показать, что модель системы на рис. 1 может быть преобразована к виду, представленному на рис. 2, где D и D* – близкие величины, а оператор F(s) определяет быструю динамику внутренних физических процессов технического объекта.
Рис. 2. Экзомодель технического объекта
Определим оператор F(s) в следующем виде:
F (s) = F = (λs +1)p  (τs +1)k , (1)
(τs +1)k , (1)
где через τ обозначим наибольшую из постоянных времени звеньев, входящих
всостав объекта, а через λ−1 в общем случае выразим нули передаточной функции.
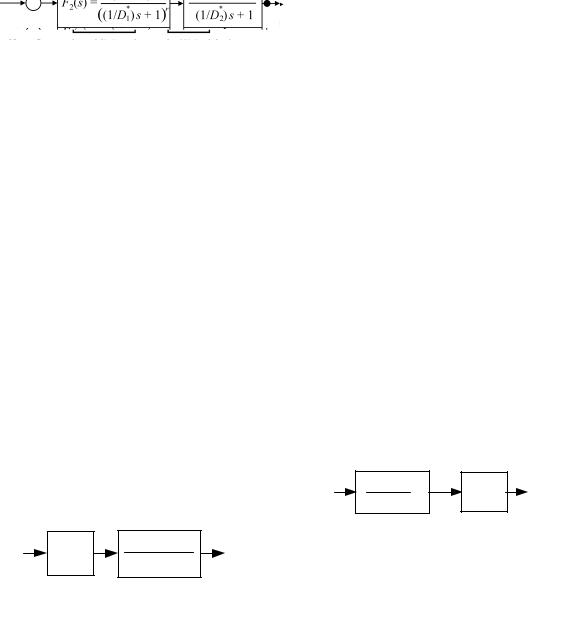
Если экзомодель 1 на рис. 2 входит
всостав другого объекта, внешнего по отношению к рассмотренному на рис. 3, то результатом будет новая экзомо-
дель 2, изображенная на рис. 4, где D2 и D2* – близкие величины. Оператор F2(s) определяет быструю динамику внешнего контура, D1* – малая постоянная времени новой экзомодели, r = k +k2 , k2 – порядок быстрых динамик внешнего контура.
Рис. 3. Внешний контур следящей системы
Рис. 4. Экзомодель внешнего контура
Модель (или внешний контур) на рис. 2 (или рис. 4) в удобной для синтеза законов адаптивного управления форме представлена на рис. 5, где а – параметр
контура D*(·) (или D2*(·)).
Рис. 5. Модель для синтеза адаптивного управления
Синтез адаптивной системы с настраиваемой моделью (НМ)
на основе экзомодели
В качестве НМ используется стационарный наблюдатель состояния. Описание адаптивной системы с НМ со-
82

держит уравнения: объекта управления, где выделена стационарная часть с параметрами а0, b0; экзомодели, описываемой оператором F, содержащей малую постоянную времени τ; настраиваемой модели и адаптивного алгоритма:
x =−a0 x+b0u +(a0 |
−a) x+ |
(2) |
|||||||||||
+ (b−b0 )u, u =g +µ, |
|||||||||||||
|
|||||||||||||
|
|
(λD +1)p |
|
|
|
|
|
|
|||||
x =Fx, F = |
|
t |
|
|
|
, |
Dt =d dt , (3) |
||||||
( |
τD +1)k |
||||||||||||
|
|
|
|
|
|
|
|
||||||
x =−(a0 |
|
|
t |
|
|
|
|
|
|
|
|
|
|
+ g1 ) x + g1x +b0u +b0 z, |
|
||||||||||||
ˆ |
|
|
ˆ |
|
|
|
|
|
|
|
|
(4) |
|
z =h sign b0 |
( |
x |
|
ˆ) |
, |
|
|||||||
|
|
|
|||||||||||
|
|
−x |
|
|
|
||||||||
µ=−b0−1Ff F −1z, Ff |
= (Tf |
Dt |
+1)−1 , |
(5) |
|||||||||
F −1 =(τD +1)k |
|
(λD +1)p . |
|||||||||||
|
|
||||||||||||
|
|
t |
|
|
|
|
|
t |
|
|
|
|
|
Уравнение объекта (2), выраженное через переменную x, имеет следующий вид:
x = −a0 x + Fb0u + F (a0 |
−a) x + |
(6) |
|
+ F (b −b0 )u + Dt Fx. |
|||
|
|||
Из выражения (2) и уравнения настраиваемой модели (4) получим уравне-
ние ошибки идентификации (e = x − xˆ): e =−a0 x +Fb0u +F (a0 −a) x +
+F (b−b0 )u +Dt Fx +
+(a0 +g )xˆ −gx −b0u −b0 z =
=−(a0 + g1 )e +(F −1)b0u +
+F (a0 −a) x + F (b −b0 )u +
+Dt Fx −b0 z.
Сходимость движения системы (2)–
(5) к эталонному исследуем методом функций Ляпунова [2] с функцией
V (e) = 0,5e2. Полная производная по
времени выбранной функции с учетом алгоритма (5) имеет вид
V (e) = −(a0 + g1 )e2 +eσ−heb0 sign b0e,
где
σ= (F −1)b0u + F (a0 −a) x +
+F (b −b0 )u + Dt Fx,
выражение Dt Fx ограничено в силу предполагаемой ограниченности решения х(t).
При малом τ > 0 и выборе h ≥ b0−1 σ
имеет место экспоненциальная сходимость в целом ошибки идентификации e(t ) системы (2)–(5).
Остановимся на рассмотрении процессов адаптации объекта управления посредством адаптирующего воздействия µ.
При малом τ > 0 имеем
µ = −b−1F |
F −1z |
|
||
|
0 |
f |
|
|
−b−1F −1 |
(F −1)b u + F (a −a) x + |
|||
0 |
|
0 |
|
0 |
+F (b −b |
)u + D Fx . |
|||
|
0 |
|
t |
|
Подстановка последнего выражения в уравнение (6) дает
x= −a0 x + Fb0u + F (a0 −a) x +
+F (b −b0 )u + Dt Fx = −a0 x + Fb0 g −
−Fb b−1F −1 |
(F −1)b u + F (a |
−a) x + |
|||
0 0 |
|
0 |
|
0 |
|
+ F (b −b |
)u + D Fx + |
|
|||
|
0 |
|
t |
|
|
+F (a0 −a) x + F (b −b0 )u + Dt Fx, |
|||||
и с учетом малости τ, |
так что |
F −1 ≈ 0, |
|||
получим |
|
|
|
|
|
−(F −1)b0µ = −a0 x +b0 g −(F −1)b0µ. (7)
Последнее слагаемое отражает комбинированную динамику малоинерционных фильтров Ff и F в цепи адапта-
ции, которое в силу устойчивости процессов ограничено, и обозначим его как
(F −1)b0µ τF .
Относительно системы (7) запишем уравнение возмущенного движения с заменой переменных x на y:
83

y = −a0 y +τF .
Зададим функцию Ляпунова V = y2 , тогда V = −2a0V + 2τF V .
Пусть τF < εF , εF > 0 в силу ограниченности τF .
Использовав подстановку w2 вместо V, w > 0, получим
w ≤ −a0w +εF
или
w ≤ w0e−a0(t −t0 ) +εF a0−1 (1−e−a0(t −t0) ).
При |
t →∞ w ≤ w e−a0 (t−t0 ) +ε |
F |
a−1 |
, |
|
0 |
0 |
|
w∞ = εF a0−1.
Неравенство выражает экспоненциальную диссипативность [1, 2] процессов сходимости системы (7) с радиусом
предельного множества εF a0−1.
На основании вышеизложенного можно сделать следующие выводы:
1. Адаптивная система с настраиваемой моделью обладает диссипативностью по адаптации и экспоненциальной сходимостью по ошибке идентификации e при достаточно малом значении параметра τ.
2. Присутствие быстрой динамики в технической системе требует наличия форсирующих звеньев в адаптивном сигнале, количество которых определя-
ется числом k учитываемых физических процессов системы.
Адаптивный регулятор для сервопривода на основе экзомодели
Для технического объекта, в качестве которого рассматривается гидропривод позиционирования, используется экзомодель, представленная на рис. 6. Параметры a, b,τ получены усреднением
τ(), D().
u |
|
b |
x |
|
1 τ |
x |
||
|
|
|
u |
|
s +1 τ |
|
|
|
|
|
s + a |
|
|
|
|
||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6. Экзомодель для сервопривода
Структура адаптивного регулятора показана на рис. 7 [1]. Сигнал адаптации µ содержит форсирующее звено со степенью k =1.
Результаты экспериментов
На рис. 8, 9 показаны результаты сравнительного экспериментального исследования сервопривода при включении адаптивного регулятора (см. рис. 9) и без него (см. рис. 8) на разных уровнях (менее 0,03 мм) и больших (более 0,2 мм) уровнях задания. При включении адаптивного регулятора наблюдается более плотное группирование высокочастотных ветвей частотных характеристик.
|
Рlant |
SV |
|
|
|
k(i ) |
|
kQx (x) |
XР |
USV |
imax |
|
|
|
|||
|
k Р |
k SV |
|
|
1 |
|
1 |
|
|
|
–i min |
∆i |
T SV s |
1 |
s |
||
|
|
|
|
|||||
|
µ |
|
|
|
Vmax |
k М2 |
x SV |
|
|
|
|
kМ1 |
|
kv |
|||
|
|
h1 |
|
|
s |
xМ |
||
|
|
T s |
1 |
|
|
|||
|
|
|
|
kv1 |
|
|||
|
|
|
Tf s |
1 |
|
|
|
|
|
|
|
|
|
|
|
xSV Y
1 |
s |
h
Рис. 7. Адаптивный регулятор для сервопривода
84
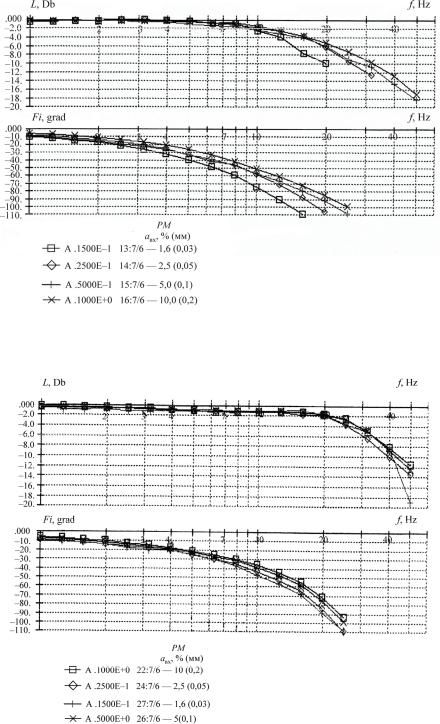
Рис. 8 Характеристики сервопривода (задание 0,03; 0,05; 0,1; 0,2 мм) без адаптивного регулятора
Рис. 9. Характеристики сервопривода (задание 0,03; 0,05; 0,1; 0,2 мм) с адаптивным регулятором
Список литературы |
|
[и др.]. – СПб.: Изд-во |
СПбГЭТУ |
1. Электрогидравлические |
рулевые |
«ЛЭТИ», 2011. – 513 с. |
системы с |
приводы с адаптивным управлением ма- |
2. Электромеханические |
||
адаптивным и модальным управлением / |
|||
невренных самолетов / С.В. Констан- |
Ю.А. Борцов, Н.Д. Поляхов, В.В. Путов. – |
||
тинов, В.Е. Кузнецов, Н.Д. |
Поляхов |
Л.: Энергоатомиздат, 1984. – 216 с. |
|
85
УДК 621.314
АКТИВНАЯ ФИЛЬТРАЦИЯ НАПРЯЖЕНИЯ НА ВЫХОДЕ СТАТИЧЕСКОГО ПРЕОБРАЗОВАТЕЛЯ
В.С. Лавриновский
Санкт-Петербургский государственный электротехнический университет «ЛЭТИ» им. В.И. Ульянова (Ленина)
Рассматриваются вопросы качества и безопасного режима работы судовой энергетической сети, которые являются важными задачами для обеспечения безопасности судна и его экипажа. Исследуется работа активных фильтров в структуре статического преобразователя. Приводятся результаты экспериментов.
Ключевые слова: активная фильтрация, статический преобразователь.
THE ACTIVE FILTERING OF STATIC CONVERTER OUTPUT VOLTAGE
V.S. Lavrinovskii
Saint Petersburg Electrotechnical University “LETI”
The issues of quality and safe mode of ship power network, which are critical tasks for the safety of the ship and its crew are discussed. The active filters work in static converter structure is considered. The results of the experiments are breathy discussed.
Keywords: active filter, static converter.
В последние годы значительно увеличилось количество электрооборудования, в том числе на судах. Работа электрооборудования в целом вносит существенные искажения в работу судовой энергетической сети. Поддержание качества и безопасного режима работы судовой энергетической сети является важной задачей при обеспечении безопасности судна и его экипажа. Существенное влияние на качество электроэнергии оказывает электропривод (ЭП). При работе частотно-управляемого ЭП в сеть непрерывно вносятся искажения, вызванные работой преобразователя частоты (ПЧ).
Основными компонентами влияния ПЧ на сеть являются высокие значения di/dt и du/dt, а также нелинейность полупроводниковых элементов. Следствием указанных факторов является: формирование нежелательных гармоник в спектре потребляемого тока и напряжения и небаланс фаз в многофазной сети.
Основными методами снижения влияния ПЧ на сеть являются:
–использование фильтрующих устройств;
–алгоритмическое снижение амплитуд нежелательных гармоник;
–использование многоуровневых преобразователей.
Разнообразие структур построения статических преобразователей частоты со звеном постоянного тока высоко и продолжает расти с каждым годом.
Из-за дороговизны, громоздкости и сложности изготовления первые многоуровневые статические преобразователи не получили широкого применения.
Прорыв в схемотехнических решениях для многоуровневых автономных инверторов напряжения (АИН) был совершен в 1981 г. [1]. Схема с изолирующими диодами была предложена с целью повышения КПД преобразования и снижения пульсации электромагнитного момента электродвигателя. Достигалась заданная цель путем снижения коэффициента гармонических искажений выходного напряжения инвертора за счет
86
увеличения количества уровней в выходном напряжении.
В 1995 г. был предложен каскадный АИН с независимыми источниками напряжения [2]. Ключевым недостатком каскадной структуры является необходимость формировать большое число электрически не связанных источников.
Альтернативным подходом, служащим также для снижения числа составных элементов и габаритов статических преобразователей (СП), является использование источников напряжения разной величины. Такое решение позволяет увеличить число уровней СП при формировании напряжения, при этом схема меньше усложняется, нежели при использовании симметричных каскадных преобразователей. Инверторы, использующие такой подход, называют асимметричными [3]. При этом по своей сути они фактически являются последовательными активными фильтрами (АФ).
Последовательный АФ в распределительной сети присоединяется последовательно с нагрузкой и компенсирует как гармонические токи, генерируемые нагрузкой, так и искажение напряжения, уже присутствующее в системе электропитания. Это решение с технической точки зрения напоминает линейный фильтр и должно быть подобрано исходя из полной нагрузки. Рассчитанный на полный ток нагрузки, последовательный активный фильтр имеет высокую мощность и, соответственно, стоимость. Кроме того, не может прямо исправлять токи нагрузки, подключенной за ним, влияя на них только посредством изменения напряжения. Существенным преимуществом последовательного активного фильтра является исправление искаженной формы напряжения независимо от природы возникновения искажений.
Однако формируемые СП искажения тока и напряжения сети предсказуе-
мы и определяются структурой и алгоритмом управления СП. Как правило, АФ и СП проектируются раздельно, соответственно, при создании АФ приходится полагаться только на данные о токах и напряжениях на шинах СП, что усложняет синтез алгоритма управления и накладывает высокие требования по быстродействию на систему управления АФ. Если же разработка как СП, так и АФ происходит совместно либо разработчик АФ имеет возможность вмешаться в СУ СП, то появляется возможность упростить управление последовательным АФ.
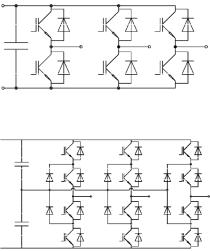
Среди СП, работающих в трехфазных сетях, широкое распространение получили трехфазный транзисторный мост (схема Ларионова), показанный на рис. 1, а, и трехфазный трехуровневый СП с изолированной нейтралью, показанный на рис. 1, б. Рассмотрим возможности объединения их с последовательным активным фильтром. Для удобства рассмотрения на рис. 2, а и б представлены соответственно фаза двухуровневого и трехуровневого СП с последовательным активным фильтром.
а
б
Рис. 1. Схемы трехфазных СП с одним источником в звене постоянного тока
87
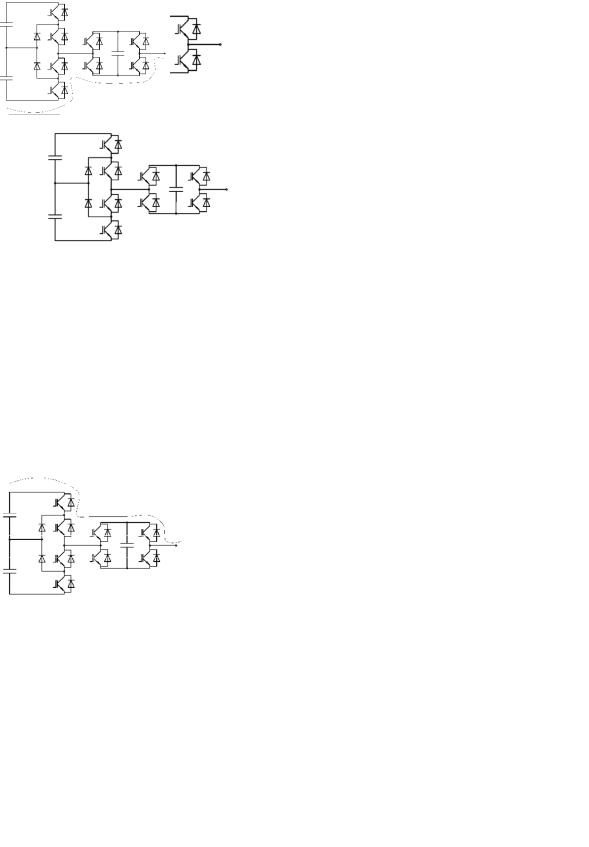
а
б
Рис. 2. Схема фазы СП с последовательным активным фильтром
Ниже представлены состояния ключей для формирования желаемых состояний на выходе двухуровневого СП и
балансировки напряжений в конденсаторах АФ.
Схема U = 1 o.e. |
|
Схема U = 0,5 o.e. |
|
|
|
|
|
|
Схема U = 0,5 o.e. |
|
Схема U = 0 o.e. |
|
|
|
|
|
|
|
|
|
|
|
|
Далее приведены состояния ключей для формирования желаемых состояний на выходе трехуровневого СП и балансировки напряжений в конденсаторах АФ.
Схема |
Схема |
Схема |
|
|
|
|
|
|
|
|
|
88
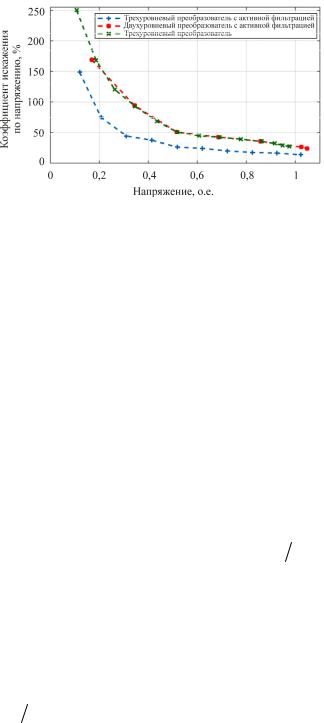
Рис. 3. Коэффициент гармонического искажения по току при равной нагрузке для СП с АФ и без АФ
Результаты работы рассматриваемых схем преобразователей в сравнении с трехуровневым СП с изолированной нейтралью показаны на рис. 3. Двухуровневая схема с активной фильтрацией показывает результаты, схожие с трехуровневой схемой, трехуровневая схема с активной фильтрацией, в свою очередь, обеспечивает меньшее искажение тока, нежели трехуровневый СП без фильтрации. Таким образом, АФ обеспечивает улучшение гармонического состава тока и напряжения на СП. В то же время рассматриваемый подход к формированию АФ для реализации СУ АФ требует только измерения напряжения конденсаторов в АФ.
Емкость в звене постоянного тока во вторичных каскадах определяется из требования изменения напряжения на емкости не более 5 % за период Tшим:
С ≥ (imax Tшим ) 0,05 UDC . |
(1) |
Соответственно, исходя из выражения (1), можно сделать вывод, что для выполнения функции фильтрации напряжения необходимая емкость в звене постоянного тока вторичных каскадов измеряется десятками мкФ, что позволяет использовать в них пленочные и бумажные конденсаторы, имеющие малое эквивалентное последовательное сопро-
тивление и способные выдержать большой ток заряда и разряда.
Однако среди номенклатуры современных конденсаторов имеются конденсаторы большой емкости с малым ЭПС. При условии доступности таких конденсаторов появляется возможность использовать иное условие выбора конденсатора в звене постоянного тока вторичных каскадов, а именно изменение напряжения не более чем на 5 % за четверть периода выходного сигнала. Тогда необходимая емкость будет определяться как
C ≥ imax (0,05 UDC 4 f0 ). |
(2) |
Увеличение емкости во вторичных каскадах позволяет задействовать два дополнительных уровня как для двух-, так и для трехуровневого преобразователя с фильтрацией, превратив их соответственно в пяти- и семиуровневые преобразователи. Также такое решение позволяет расширить диапазон линейного регулирования до 120 и 110 % для двух- и трехуровневых преобразователей соответственно.
Как видно из рис. 3, использование дополнительного каскада позволяет снизить коэффициент искажения по напряжению и привести его к значению, характерному для СП с большим числом уровней.
89
Список литературы
1.Nabae A. A new neutral-point- clamped PWM inverter // IEEE Transaction in Industry Applications. – 1981. – Vol. 1A-17. – № 5.
2.A multilevel voltage-source inverter with separate DC sources for static VAr generation // Fang Zheng Peng, Jih-Sheng
Lai, McKeever J., Van Coevering J. // Industry Applications Conference. Thirtieth IAS Annual Meeting, IAS '95. Conference Record of the 1995 IEEE. – 1995. – Vol. 3.
3. Malinowski M. A survey on cascaded multilevel inverters // IEEE Transactions on Industrial Electronics. – 2010. – Vol. 57, № 7.
90