

1491
.pdfТаким образом, применение специализированного программного обеспечения для оптимизации параметров синхронных машин позволит повысить качество электромагнитных расчетов, сократить время и снизить трудоемкость благодаря автоматизации процесса проектирования в целом.
Процесс оптимального проектирования синхронной машины подразумевает выделение нескольких критериев оптимальности, поскольку расчет синхронных машин является трудоемкой задачей.
Во-первых, необходимо уменьшить материальные затраты на производство синхронной машины, обеспечив при этом энергетические показатели электрической машины «неоптимальной» конструкции. Во-вторых, необходимо уменьшить временные затраты на проектирование синхронной машины, обеспечив полный расчет.
Заключение
возрастающих переходных процессов синхронных машин / Е.А. Чабанов [и др.] // Фундаментальные исследова-
ния. – 2014. – № 12–10. – С. 2135–2141.
На основе анализа существующей теории разрабатывается метод оптимизации параметров мощных синхронных машин при их проектировании. Реализация разрабатываемого метода оптимизации будет способствовать уменьшению технико-экономических и энергетических ресурсов при сохранении заданных технологических показателей, а значит, решению важной задачи энерго- и ресурсосбережения.
Список литературы
1.Пахомин С.А. Проектирование синхронных генераторов: учеб. пособие
ккурсовому проекту по электромеханике / Юж.-Рос. гос. техн. ун-т. – Новочер-
касск, 2007. – 91 с.
2.Вероятностно-статистические методы идентификации синусоидально
171
УДК 621-83-52
ИССЛЕДОВАНИЕ РАБОТЫ АСИНХРОННОГО ВЕНТИЛЬНОГО КАСКАДА
М.Е. Тюленев, М.С. Байбаков
Пермский национальный исследовательский политехнический университет
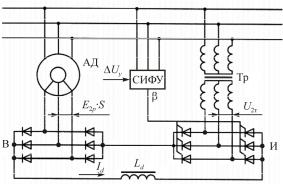
Рассмотрена структура асинхронного вентильного каскада, состоящего из асинхронного двигателя с фазным ротором, выпрямителя, сглаживающего фильтра, зависимого инвертора и системы импульс- но-фазового управления. Представлена модель данной системы, разработанная с использованием программного продукта MatLab/Simulink. Рассмотрено несколько режимов работы данной системы.
Ключевые слова: асинхронный двигатель с фазным ротором, асинхронный вентильный каскад, система импульсно-фазового управления, моделирование.
RESERCH OPERATION OF WOUND-ROTOR SLIP RECOVERY SYSTEM
M.E. Tyulenev, M.S. Baibakov
Perm National Research Polytechnic University
The article describes the structure wound-rotor slip recovery system, consisting of a wound-rotor induction motor rectifier, inductive filter and phased-back rectifier with pulse control system. Presented the model of this system, developed with using the software Matlab/Simulink. Considered several modes of operation this system.
Keywords: wound-rotor induction motor, wound-rotor slip recovery system, pulse control system, simulation.
Значительное количество производственных механизмов, укомплектованных асинхронными двигателями (АД) с фазным ротором, нуждаются сегодня в модернизации электропривода. Наиболее распространенный тип такого привода – так называемые резистивные роторные станции. Данный тип привода обладает следующими недостатками:
–низкая энергоэффективность;
–необходимость обслуживания;
–отсутствие возможности плавного регулирования скорости [1].
Одним из возможных решений данной проблемы на сегодня является установка асинхронно-вентильного каскада (АВК). Структура АВК представлена на рис. 1.
Преобразователи данного типа работают в рекуперативном режиме, что обеспечивает высокий коэффициент полезного действия [2]. АВК включает в себя асинхронный двигатель с фазным ротором, выпрямитель в цепи ротора,
сглаживающий реактор, зависимый инвертор с системой импульсно-фазового управления, и согласующий трансформатор. Принцип действия АВК заключается в следующем: при работе двигателя ЭДС, наводимая в роторных обмотках двигателя, выпрямляется, после чего инвертируется обратно в сеть инвертором.
Рис. 1. Структурная схема АВК
При изменении угла опережения инвертора можно получить ряд механических характеристик, представленных на рис. 2.
172

Рис. 2. Механические характеристики при изменении угла опережения инвертора
Практический диапазон регулирования скорости в каскадных схемах обычно не превышает 2. Объясняется это тем, что по мере роста диапазона регулирования скорости и тем самым скольжения АД требуется увеличивать уста-
новленную |
мощность |
всех |
устройств |
в его роторной цепи. |
|
|
|
Для анализа работы АВК была |
|||
разработана |
модель |
[3] |
в среде |
Simulink при использовании библиотеки
SimPowerSystems. Данная модель вклю-
чает в себя следующие элементы: реальный источник напряжения 0,4 кВ (источник напряжения ограниченной мощ-
ности), асинхронный двигатель с фазным ротором, трехфазный мостовый выпрямитель, сглаживающий фильтр, зависимый инвертор с системой импульснофазового управления, согласующий трансформатор. В качестве асинхронного двигателя был выбран двигатель небольшой мощности, при этом запуск двигателя возможен без использования добавочного сопротивления. Схема модели представлена на рис. 3.
Данная модель позволяет проанализировать все режимы работы АВК, например пуск двигателя с последующим изменением значения угла опережения инвертора (β). На рис. 4 представлены графики изменения механических характеристик двигателя.
В момент времени 0,3 с происходит уменьшение угла β со значения 90 до 40°, при этом наблюдается снижение скорости под действием нагрузочного момента, также можно заметить, что снижение значения β приводит к появлению пульсаций момента двигателя.
Анализируя зависимости изменения тока, потребляемого двигателем (рис. 5), можно заметить, что в момент пуска амплитуда тока статора превышает установившееся значение в 10 раз.
Рис. 3. Схема модели АВК в Simulink
173
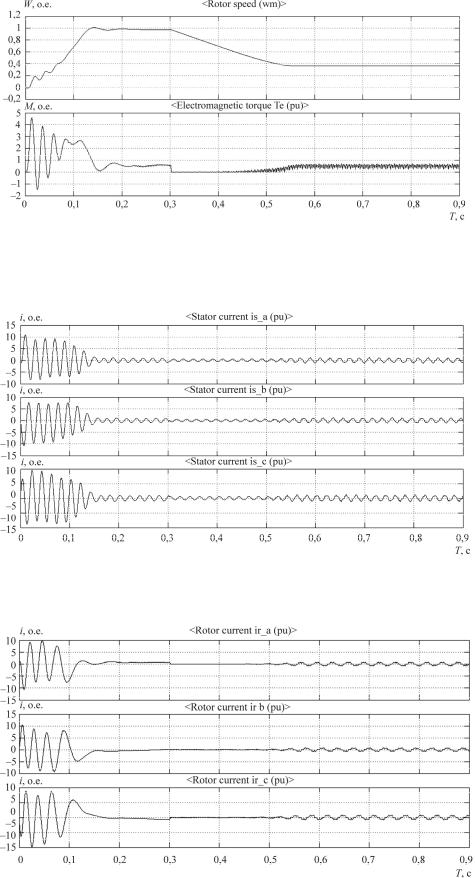
Рис. 4. Изменение угловой скорости и момента двигателя в относительных единицах от времени (при пуске с последующим изменением значения угла опережения инвертора в момент времени 0,3 с)
Рис. 5. Изменение статорных токов в относительных единицах от времени (при пуске с последующим изменением значения угла опережения инвертора в момент времени 0,3 с)
Рис. 6. Изменение токов ротора в относительных единицах от времени (при пуске с последующим изменением значения угла опережения инвертора в момент времени 0,3 с)
174
При снижении значения β в момент времени 0,3 c наблюдается искажение формы токов статора двигателя. Аналогичная картина наблюдается также и при анализе токов ротора (рис. 6). Данные искажения вызваны спецификой работы выпрямителя в цепи ротора двигателя. Кроме того, снижение угла опережения приводит к росту статорного и роторного токов двигателя.
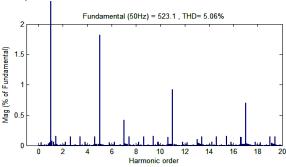
Поскольку данная система включает в себя зависимый инвертор, целесообразно оценить влияние работы АВК на питающую сеть. На рис. 7 представлена спектральная диаграмма напряжения сети при работе АВК с углом β = 90°.
Рис. 7. Спектральная диаграмма напряжения сети
Анализ показал, что на искажение формы питающего напряжения в большей степени оказывают влияние 5, 7, 11, 17-я гармоники, при этом наибольшее значение коэффициента гармонических искажений наблюдается при больших значениях угла опережения.
Также стоит отметить, что влияние гармонических составляющих увеличивается при снижении мощности питающей сети. При соотношении мощности привода к мощности источника 1:60 значение коэффициента гармонических искажений достигает 40 %.
Более того, АВК обладает низким коэффициентом мощности. Среднее значение коэффициента мощности исследуемой системы для режима при β = 90°
составило 0,5, а для режима работы при β = 15° – 0,55. Следовательно, для уменьшения влияния высших гармоник и компенсации реактивной мощности при работе АВК необходимо использовать фильтрокомпенсирующие устройства.
Список литературы
1.Вольдек А.И. Электрические машины: учебник для студентов втузов. – 2-е изд., перераб. и доп. – Л.: Энергия, 1974. – 840 с.
2.Онищенко Г.Б., Локтева И.Л. Асинхронные вентильные каскады и двигатели двойного питания. – М.: Энер-
гия, 1979. – 200 с.
3.Копылов И.П. Математическое моделирование электрических машин: учебник для вузов. – 3-е изд., перераб.
идоп. – М.: Высш. шк., 2001. – 327 с.
175
УДК 662.276;621.313
ИНДУКЦИОННЫЙ НАГРЕВАТЕЛЬ ЗАБОЯ НЕФТЯНОЙ
Е.С. Вильданов, Е.М. Огарков
Пермский национальный исследовательский политехнический университет
Рассматриваются вопросы расчета индукционного нагревателя, предназначенного для прогрева призабойного пространства нефтяных скважин. Прогрев забоя скважины является одним из эффективных способов усиления нефтеотдачи пласта и повышения производительности скважины. Рассматривается индукционный нагреватель соленоидного типа, который прост в изготовлении и обеспечивает максимальную энергетическую эффективность в условиях стесненного пространства скважины. Расчетная модель нагревателя состоит из нескольких слоев с постоянными значениями электропроводности и магнитной проницаемости. Влияние насыщения учитывается итерационным путем. Расчетная модель построена в прямоугольной системе координат, что позволяет резко упростить расчет электромагнитного поля и энергетических характеристик нагревателя.
Ключевые слова: индукционный нагреватель, нефтяная скважина, забой скважины, обсадная труба, шихтованный магнитопровод, катушка из медного изолированного провода, электрический ток, линейная токовая нагрузка, расчетная модель, векторный потенциал, электромагнитная мощность.
INDUCTION HEATER FOR OIL-WELLS
E.S. Vildanov, E.M. Ogarkov
Perm National Research Polytechnic University
It is dealt with calculations of inductor heater which is destined for warmup of oil-well’s hole-bottom region. Warmup of bottom hole is one of the most effective ways to step out a reservoir recovery and to increase oil-well production rate. It is dealt with a solenoid type of induction heater which is easy to manufacture and one of its advantages is maximizing of energy efficiency in conditions of crampedoil-well space. Computed model of induction heater consists of several parts which include constant values of electric conductance and inductivity. Saturation effect is counted towards to iterative way. Computed model is built in rectangular coordinate system to provide an opportunity to simplify calculations of electromagnetic field and calculations of an inductive heater energy characteristic.
Keywords: inductor heater, oil-well, bottom hole, casing pipe, laminated magnetic conductor, coil from copper isolated wire, electric current, linear current load, computed model, vector potential, electromagnetic power.
Условия для выпадения кристаллов парафина из нефти в призабойной зоне пласта могут возникать в процессе эксплуатации неглубоких месторождений высокопарафинистой нефти. Очевидно, что в случае закупорки призабойной зоны кристаллами парафина нагревание призабойной зоны приводит к раскупорке пласта и может дать значительное повышение притока нефти.
Рассматриваемый индукционный нагреватель предназначен для прогрева забоя и призабойного пространства нефтяных скважин. Такой прогрев является одним из эффективных способов усиления нефтеотдачи пласта и повышения производительности скважины.
Существует несколько видов прогрева пласта: огневой, паровой и электрический нагрев. Электрический нагрев делится на два вида: нагрев ТЭНами и индукционный нагрев. ТЭНы всё тепло отдают скважинной жидкости. Большая часть тепла уносится скважинной жидкостью, а до обсадной трубы и призабойного пространства доходит малая часть тепла, созданного нагревателем. Также минусом ТЭНов является высокая температура, которая приводит к закоксовыванию забоя. Такие нагреватели малоэффективны при нагреве забоя и призабойного пространства скважины.
Индукционные нагреватели лучше подходят для нагрева забоя скважины,
176

так как электрическая энергия от катушки нагревателя передается к обсадной трубе с помощью магнитного поля. Немагнитный зазор между корпусом нагревателя и обсадной трубой достигает 10 мм, поэтому здесь следует применять индукционный нагреватель соленоидного типа представленный на рис. 1.
Протяженность слоев расчетной модели по оси y принимаем равной длине окружности обсадной трубы, так как основной процесс преобразования энергии происходит в стенке трубы.
Рис. 1. Индукционный нагреватель для скважин: 1 – шихтованный магнитопровод; 2 – катушка нагревателя; 3 – обсадная труба
Индукционный нагреватель имеет катушку 2 из медного провода, по которой протекает переменный ток. При этом создается сильное переменное магнитное поле, которое индуцирует в обсадной трубе 3 вихревые токи, нагревающие металл.
Для усиления магнитного поля в нагревателе используется магнитопровод 1 из листовой электротехнической стали.
Индукционный нагреватель забоя нефтяной скважины имеет форму цилиндра диаметром 100–140 мм, состоит их трех секций длиной 0,5–1 м.
Поскольку длина нагревателя много больше диаметра, то изменение магнитного поля на концах нагревателя мало скажется на общем магнитном поле, поэтому магнитное поле по длине нагревателя можно считать неизменным. Магнитное поле по окружности тоже равномерное, таким образом, необходимо рассчитать изменение магнитного поля только по одной координате z (по радиусу). Такой расчет можно выполнить аналитически, с помощью расчетной модели, полученной из схемы нагревателя.
Рис. 2. Расчетная модель нагревателя: 1 – шихтованный магнитопровод; 2 – катушка нагревателя; 3 – обсадная труба; 4 – затрубное пространство
Зона 1 на рис. 2 соответствует внутреннему магнитопроводу нагревателя, выполненному из листовой электротехнической стали. Магнитная проницаемость этой зоны по оси х равна магнитной проницаемости стали (µ1x = µ1).
Магнитная проницаемость по оси z принята равной бесконечности, т.е. магнитное поле по сечению магнитопровода распределяется равномерно. Это допущение упрощает расчеты без ущерба для их точности. Электропроводность зоны 1 равна нулю (γ1 = 0).
Зона 2 – немагнитное пространство между внутренним магнитопроводом и обсадной трубой. Магнитная проницаемость равна µ0 , электропроводность
равна нулю (µ2 = µ0 , γ2 = 0). Эта зона
учитывает зазор между нагревателем и обсадной трубой, а также пространство катушки.
Зона 3 соответствует стенке обсадной трубы. Магнитная проницаемость и электропроводность материала обсадной трубы µ3, γ3 соответственно.
Зона 4 – затрубное пространство Магнитная проницаемость ровна µ0,
177

электропроводность ровна нулю (µ4 = µ0,
γ4 = 0).
Решение для векторного потенциала всех зон расчетной модели имеет вид
Α1 =V1z,
Α2 =V2eαz +V3e−αz , Α3 =V4eP3z +V5e−P3z ,
Α4 =V6e−αz .
Напряженность электрического поля при принятых в расчетной модели допущениях имеет одну составляющую, направленную по оси у:
E = − ∂Α∂t = − jωΑ.
Магнитная индукция находится через векторный потенциал:
Bx = − ∂Α∂zy .
Напряженность магнитного поля через индукцию
Hx = Bx .
µx
Граничные условия. Внешние гра-
ничные условия при z = 0 и z = ∞ учтены в решениях Α1 и Α2.
На границах зон расчетной модели должны быть равны касательные составляющие напряженностей электрического и магнитного полей:
En = En+1, Hn = Hn+1 + Jл.
Из шести граничных условий получаем систему уравнений
z1V1 −eαz1V2 −e−αz1V3 = 0,
V1 −α µ1 eαz1V2 +α µ1 e−αz1V3 = µ1Jл,
µ0 µ0
eαz2V2 +e−αz2V3 −eP3z2V4 −e−P3z2V5 = 0,
178
eαz2V2 −e−αz2V3 − µ0 P3 eP3z2V4 + µ3α
+µ0 P3 e−P3z2V5 = 0,
µ3α
eP3z3V4 +e−P3z2V5 −eαz3V6 = 0,
|
µ0 P3 |
eP3z3V − |
µ0 P3 |
e−P3z3V +e−αz3V = 0. |
||
|
µ3α |
|
||||
|
4 |
µ3α |
5 |
6 |
||
|
Решив систему уравнений, найдем |
|||||
значения неизвестных V1, |
V2 , V3 , |
V4 , V5 |
||||
и V6 , через которые получаем значение
векторного потенциала во всех зонах. Далее находим значение магнитной
индукции в первой и третьей зонах B1 и B3 и по их значениям уточняем значения магнитной проницаемости первой и третей зон µ1 и µ3, так как магнитная про-
ницаемость – величина непостоянная и зависит от индукции магнитного поля.
Мощность, передаваемая от катушки нагревателя к обсадной трубе, называется электромагнитной. Эту мощность проще всего определить через линейную токовую нагрузку и напряженность электрического поля на границе зон 1 и 2 расчетной модели:
L
Sэм = −b∫ E1Jл*dx.
0
Здесь b – длина окружности обсадной трубы; E1 – напряженность электриче-
ского поля на границе зон 1 и 2.
При равномерности распределения магнитного поля по оси х, выполнив интегрирование, получим электромагнитную мощность в таком виде:
Sэм = jωV1z1JлbL.
Активная, реактивная и полная мощность нагревателя
Pэм = Re Sэм,
Qэм = Im Sэм,

Sэм = Pэм2 +Qэм2 .
Сопротивления, соответствующие электромагнитной мощности,
R |
= |
Pэм |
, X |
|
= |
Qэм |
. |
|
|
|
|||||
эм |
|
I 2 |
эм |
|
I 2 |
||
Изложенный выше алгоритм расчета был положен в основу программы расчета электромагнитного поля и энергетических характеристик индукционного нагревателя. Программа расчета нагревателя реализована в среде MathCAD. По разработанной программе был выполнен расчет индукционного нагревателя соленоидного типа при следующих исходных данных:
d1 =100 мм, d2 =160 мм, h3 = 9 мм,
L =1 м, γ3 = 3106 |
1 |
, |
w = 300, |
|
|
||||
Ом м |
||||
|
|
|
kз1 = 0,6.
Обсадная труба выполнена из малоуглеродистой литой стали. Источник питания – сеть 380 В, 50 Гц. Остальные величины определялись и уточнялись
впроцессе расчета.
Врезультате расчета были получены следующие результаты:
− ток катушки I1 = 65,4 A;
− активная мощность нагревателя
P=13,5 кВт;
−коэффициентмощностиcosϕ = 0,54;
−мощность в стенке обсадной тру-
бы 12,8 кВт.
Заключение
Из результатов видно, что индукционные нагреватели соленоидного типа очень хорошо подходят для прогрева забоя нефтяных скважин. Это обусловлено тем, что 95 % энергии выделяется в обсадной трубе и идет непосредственно на нагрев забоя скважины. Внутри нагревателя выделяется около 5 % общей мощности, что облегчает решение главной
проблемы – защиты катушки нагревателя от перегрева.
Список литературы
1.Справочное руководство по проектированию разработки и эксплуатации нефтяных месторождений. Добыча неф-
ти. – М.: Альянс, 2007. – 455 с.
2.Кувалдин А.Б. Индукционный нагрев ферромагнитной стали. – М.: Энер-
гия, 1988. – 200 с.
3.Огарков Е.М. Квазитрехмерная теория линейных асинхронных двигателей / Перм. гос. техн. ун-т. – Пермь, 2003. – 240 с.
4.Мищенко И.Т. Скважинная добыча нефти. – М.: Изд-во РГУ нефти и газа, 2007. – 826 с.
5.Мищенков И.С. Воздействие на нефтяные залежи и призабойные зоны продуктивных пластов. – Пермь, 1974. – 128 с.
6.Муслимов Р.Х. Современные методы повышения нефтеизвлечения. – Ка-
зань, 2004. – 582 с.
7.Справочник мастера по ремонту нефтегазового технологического оборудования. – М.: Инфра-Инженерия, 2008. – 576 с.
8.Огарков Е.М. Квазитрехмерная теория линейных асинхронных двигателей. – Пермь: Изд-во Перм. нац. исслед. политехн. ун-та, 2003. – 240 с.
9.Огарков Е.М., Вильданов Е.С. Расчетная модель индукционного нагревателя для нефтяных скважин // Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления. – 2016. – № 15. – С. 115–123.
10.Установки индукционного нагрева. – Л.: Энергоиздат, 1981. – 272 с.
11.Кувалдин А.Б. Индукционный нагрев магнитной стали на промышленной частоте. – М.: ВИНИТИ, 1976. – 83 с.
179
УДК 629.423:621.313:517.958
ПАРАМЕТРИЧЕСКИЙ СИНТЕЗ ЭЛЕКТРОМАГНИТОВ БРОНЕВОГО ТИПА МИНИМАЛЬНОЙ МАССЫ
Ю.А. Бахвалов, В.В. Гречихин, А.Л. Юфанова
Южно-Российский государственный политехнический университет (НПИ) им. М.И. Платова, Новочеркасск
Предложен метод параметрического синтеза электромагнитов броневого типа минимальной массы, основанный на решении обратной задачи стационарного магнитного поля и преобразовании ограничения на силу притяжения в целевую функцию. Минимизация функции выполняется методом градиентного спуска. Минимизация второй целевой функции (массы электромагнита) осуществляется аналитически. Приведены результаты экспериментальных исследований. Метод отличается высокой эффективностью и может быть использован при проектировании электромагнитов других типов.
Ключевые слова: синтез, электромагнит, обратные задачи, метод градиентного спуска, метод конечных элементов.
PARAMETRIC SYNTHESIS OF SHELL-TYPE ELECTROMAGNET WITH
MINIMUM MASS
Yu.A. Bakhvalov, V.V. Grechikhin, A.L. Yufanova
Platov South-Russia State Polytechnic University (NPI), Novocherkassk
The article is proposed the parametric synthesis method of the shell-type electromagnets of minimum mass based on the solution of the inverse problem of the stationary magnetic field and the transformation of restrictions on the tractive force in the objective function. Minimizing the function is performed by the gradient descent method. Minimizing the second objective function (mass of electromagnet) is carried out analytically. Results of experimental researches are given. The method characterized by high efficiency and can be used for the design electromagnets of other types.
Keywords: parametric synthesis, electromagnet, inverse problems, method of gradient descent, finite element method.
Электромагниты броневого типа находят широкое применение в электротехнических системах. В связи с этим совершенствование методов проектирования таких электромагнитов, обладающих улучшенными характеристиками, в том числе минимальными массой и габаритными размерами, является актуальной задачей.
Синтез будем осуществлять с применением методологии обратных задач, которая является одним из перспективных направлений в идентификации физических явлений и оптимальном проектировании технических объектов и технологических процессов [1].
Решение обратных задач сводится к последовательности прямых задач мате-
матической физики и применению методов минимизации функций или функционалов. Обратные задачи относятся к некорректным в классическом смысле. Возможно неединственность их решений и неустойчивость по отношению к малым изменениям исходных данных. Далее будем рассматривать задачи, существование и единственность решений которых доказаны в опубликованных работах, а для обеспечения устойчивости решения будем искать в классе функций с ограниченной нормой. Такие задачи называют условно корректными или корректными по А.Н. Тихонову [3].
Конструкция рассматриваемого электромагнита показана на рисунке. Критерием оптимальности является мас-
180