

1491
.pdfной замене в процессе расчета тока одного вида модуляции другим. Известно, что процесс ШИМ придает преобразователю нелинейные свойства, существенно затрудняющие исследование его математических моделей. Покажем, что достигаемая в процессе ПИМ-преобразования эквивалентность ШИМ и амплитудноимпульсной модуляции (АИМ) может быть использована для линеаризации расчетных уравнений. Для этого в управляющем канале модели необходимо осуществить переход от широтной к фиктивной амплитудной модуляции той же частоты, причем условием адекватности замены должно служить потактное равенство вольт-секундных площадей импульсов напряжения в исходной (нелинейной) и эквивалентной (линеаризованной) моделях. Покажем, что данный прием способен значительно упростить вычисления тока как в импульсных, так и непрерывных моделях систем автоматического управления с данным устройством.
Вариант 1. Происходящие в ПИМпреобразователе модуляционные процессы можно отразить с помощью структурной схемы, представленной на рис. 6.
Квантование на двух кратных частотах: f0 = mω0/2π – частоте сетевых пульсаций и f = 2f0N – несущей частоте – потребовало введения в эту схему N + 1 импульсных элементов (ИЭ), соединенных последовательно-параллельно. В по-
лученной таким образом «многократной импульсной системе восходящего типа» [7, 8] переключения импульсных элементов происходят с одинаковой сетевой частотой f0, при этом элементы ИЭ2−ИЭ(N + 1) переключаются с взаимным фазовым сдвигом, равным периоду несущей частоты 1/(2Nf0). Для отображения особенностей ПИМ-преобразо- вания амплитудные изменения питающего напряжения компенсируются разной величиной коэффициентов передачи параллельных каналов K0, K1, ..., KN–1 с указанными импульсными элементами. Представим данную модель в виде последовательного соединения двух импульсных систем с разными частотами квантования и передаточными функциями формирующего элемента Wф(z, ε) и нагрузки Wн(z, ε). Тогда выражение дискретной передаточной функции системы запишется как
|
|
W (z,ε) = |
i(z,ε) |
= |
|
|
|
|
|
|||||||
|
|
x(z,ε) |
|
|
|
|
|
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
l |
|
|
n −1 |
|
|
|
|
|
|
|
n −1 |
|
+ |
|||
|
|
|
|
|
|
|
||||||||||
= ∑Wф z, |
|
N |
|
Kn Wн z,ε− |
N |
|
||||||||||
n=1 |
|
|
|
|
|
|
|
|
|
|
|
|
||||
|
|
+z |
−1 |
N |
|
|
n −1 |
× |
|
|
|
|
||||
|
|
|
∑Wф z, |
N |
|
|
|
|
|
|
||||||
|
|
|
|
|
l+1 |
|
|
|
|
|
|
|
|
|
||
|
|
|
|
|
|
|
|
|
1− |
n −1 |
|
|
(15) |
|||
|
× Kn Wн z,ε+ |
|
N |
|
|
|
||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Рис. 6. Структурная схема импульсной модели ПИМ-преобразователя
121
при |
l −1 |
≤ ε ≤ |
l + γn |
; l =1, 2, ..., N. |
В ис- |
N |
|
||||
|
|
N |
|
||
ходном варианте с ШИМ применение выражения (15) ограничивается итерационным расчетом выходной координаты i(z, ε), для чего необходимо задаться начальным значением тока i(z, 0) и при-
нять x(z,0) = xz/xоп(мин) · (z – 1); K0 = K1 ... = = KN–1 = 1. Затруднения вызывает неявная форма задания управляющего сигнала, требующая пошагового отыскания длительностей импульсов напряжения ∆t1n. Эти вычисления должны предшествовать отысканию n-го значения тока и осуществляться исходя из равенства площадей импульсов в течение периода повторяемости выпрямленного напряжения
∆t1n = arccos(cos(nT + f ) −S0 /N )−
− f −nT , |
(16) |
π/2−θ |
|
где S0 = ∫ sin (ω0t )dω0t; |
f = π/2 −θ; |
π/2−θ
n= 0,1, ..., N −1.
Вкачестве примера ниже приведены
значения ∆t1n для случая m = 3; x/xоп(мин) = = 1; f = 600 Гц; N = 4. В таблице пред-
ставлены параметры многократной импульсной системы.
Параметры многократной импульсной системы
n |
0 |
1 |
2 |
3 |
|
|
|
|
|
∆t1n/T |
0,644 |
0,434 |
0,413 |
0,489 |
Kn |
1,362 |
0,898 |
0,837 |
1,045 |
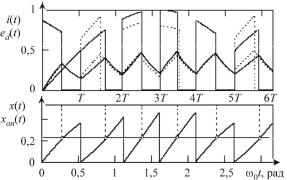
Переход от дискретных значений аргумента t = nT к его непрерывному аналогу ε = (t – nT)/nT позволил рассчитать кривую тока i(t) на выходе модели в режиме непрерывного времени (рис. 7).
Аналогичный расчет переходного процесса проведен с помощью линеаризованного варианта модели на основе эквивалентной АИМ. В условиях данного вида модуляции регулируемым пара-
122
метром становится амплитуда синусоидальной огибающей импульсного напряжения, задаваемая на каждом такте сигналом уставки x(nT), в то время как частота f = 2Nf0 и относительная длительность импульсов ∆t1n/Т = 0,5 остаются неизменными. Как уже сказано, выравнивание импульсного напряжения питания потребовало потактного изменения амплитуды импульсов. Эта задача решена с помощью использования в параллельных каналах схемы рис. 6 пропорциональных звеньев, коэффициенты передачи которых K0, ..., KN–1 вычислены исходя из равенства вольт-секундных площадей импульсов при x = xоп(мин). Полученные на рис. 7 результаты подтверждают адекватность линеаризованной модели, так как кривые тока нагрузки в условиях ШИМ и эквивалентной АИМ оказались идентичными.
Рис. 7. Кривые выходного напряжения ed(t) и тока i(t), управляющего x(t) и опорного xоп(t) сигналов, полученные расчетом в исходной модели с ШИМ (сплошная линия) и линеаризованной модели с эквивалентной АИМ (пунктирная линия)
Вариант 2 представляет непрерывную модель ПИМ-преобразователя с переменной структурой, учитывающей изменения конфигурации и параметров схемы замещения во время импульсов и пауз.
Записывая исходные уравнения состояний многомерного объекта с ПИМ в форме переменных состояния

d |
Y(t) = A |
Y(t) +B |
U |
(t), (17) |
|
||||
dt |
1(2) |
1(2) |
1(2) |
|
|
|
|
|
получаем решения (17) в предположении постоянства внешних воздействий:
–на интервале n-го импульса nT ≤
≤t ≤ nT + ∆t1n
Y(t) = eA1(t−nT ) Y(nT ) +
+ A1−1 (eA1(t−nT ) −1)B1U1(nT ); (18)
–на интервале n-й паузы nT + ∆t1n ≤
≤t ≤ (n + 1)T
Y(t) = eA2 (t−nT −∆t1n ) Y (nT +∆t1n ) +
+ A−21 (eA2 (t−nT ) −1)B2U2 (nT ). (19)
d i1 = − r1 i1 +sin(α+t), dt L1
d |
i |
= − |
r2 |
i . |
(21) |
|
dt |
L |
|||||
2 |
|
2 |
|
|||
|
|
2 |
|
|
||
Рассматривая решения этих уравнений как частный случай выражений (18), (19), принимаем
A1 = –r1/L1; A2 = –r2/L2; B1 = 1; B2 = 0; U1[nT] = sin(φ + nT); U2[nT] = 0; ∆t1n/T = ∆t2n/T = 0,5; β1 = T/τ1; β2 = T/τ2; α = (π/2) – θ.
Последующий переход к относительному аргументу t = t/T = n +ε, где
Задаваясь моментом времени t =
=nT + ∆t1n в уравнении импульса и t =
=(n + 1)T в уравнении паузы, методом подстановки выражения (18) в формулу (19) получаем многомерное разностное уравнение объекта с ПИМ-преобразова- телем
ε = (t −nT ) / nT , позволяет переписать разностное уравнение (18) в следующем виде:
i[n +1] −e−βЭ i[n] = R , |
(22) |
n |
|
где βЭ = (τ1 +τ2 ) / 2τ1τ2 ; Rn = Kn τ1 ×
×(e−1/2τ2 −e−βЭ ).
Y[(n +1)T ] = eAЭ(∆t1n ) Y[nT ] +Rn , (20) |
Теперь уравнение (21) |
оказывается |
|||||
где |
линейным; его решение получим с по- |
||||||
AЭ (∆t1n ) = A1 ∆t1n + A2 (T −∆t1n ); |
мощью z-преобразования. Принимая в |
||||||
Rn = A1−1 (eA1 ∆t1n −1)eA2 (T −∆t1n )B1 U1(nT ). |
правой части Rn (z, 0) = Rn z/z −1, |
запи- |
|||||
шем изображение выходной координаты |
|||||||
Уравнение (20) позволяет рассчи- |
i* (z) = e−βЭ Rn z / (z −1)(z −e−βЭ ). |
|
|||||
тать переходный процесс при каждом из |
Обратный переход в область ориги- |
||||||
указанных выше способов модуляции. |
|||||||
нала позволяет |
получить |
дискретные |
|||||
Однако в условиях ШИМ данное выра- |
значения тока в начале каждого n-го |
||||||
жение оказывается нелинейным. Его |
такта: |
|
|
|
|
|
|
расчет, так же как и ранее, требует по- |
2 |
|
|
|
|
|
|
тактного отыскания длительностей им- |
|
|
|
|
= |
||
i(n, 0) = ∑Re s (i* (z) zn−1 ) |
|
||||||
пульсов ∆t1n с помощью трансцендент- |
ν=1 |
|
|
|
z=zν |
|
|
ных уравнений. Переход к эквивалент- |
|
1−e−βЭn |
|
|
|
|
|
ной АИМ позволяет принять ширину |
= |
Rn . |
|
|
(23) |
||
1−e−βЭ |
|
|
|||||
импульсов постоянной, что значительно |
|
|
|
|
|
||
упрощает расчеты. Покажем это на про- |
Не останавливаясь, ввиду очевидно- |
||||||
стейшем примере, когда описание пре- |
сти, на решении исходных уравнений |
||||||
образователя на интервалах импульса и |
(21), приведем результаты этого реше- |
||||||
паузы осуществляется с помощью урав- |
ния в общем виде: |
|
|
|
|
||
нений первого порядка: |
– для импульса 0 ≤ ε ≤ 0,5 |
|
|
||||
|
|
|
|
|
|
123 |
|

i(n +ε) = R |
+(i(n, 0) − R |
)e−β1ε; (24) |
n |
n |
|
–для паузы 0,5 ≤ ε ≤ 1 i(n +ε) =
|
− Rn )e |
−β1 |
0,5 |
−β2 |
(ε−0,5) |
. (25) |
= Rn +(i(n, 0) |
|
e |
|
|
Порядок вычислений тока с помощью выражений (24), (25) требует, чтобы на каждом такте принимались новые начальные значения i(n, 0) и Rn. Представленные на рис. 7 результаты демонстрируют достаточно близкое совпадение кривых тока вариантов 1 и 2.
Вариант 3. Получим модель ПИМпреобразователя с постоянной структурой, работа которой возможна при управляющем сигнале произвольного вида. Условием служит равенство электромагнитных постоянных времени цепи нагрузки на интервалах импульсов и пауз τ1 ≈ τ2 = σ–1. Для этого представим ПИМ-преобразователь непрерывным инерционным звеном первого порядка, входной координатой которого служит кусочно-синусоидальная ЭДС еd(t). Полагается, что регулирование преобразователя происходит по закону эквивалентной АИМ (см. рис. 7). Непрерывность модели достигается описанием еd(t) на всем периоде Т0 с помощью одного выражения. Такую возможность предоставляет математический аппарат комплексных коммутационных функций (ККФ) [9]. Так, например, представленную на рис. 7 кривую выпрямленного напряжения на каждом такте удается описать единым комплексным выражением
ed (k, N ) =
=(1+e jπk )(0,5e j0,523 +0,03e j(0,54+πk /2) +
+0,065e j(0,807+πk /4) +0,065e j(0,25+3πk /4) )×
×exp( jω0t),
124
где k – порядковый номер гармонической составляющей в спектре кривой ed(t), k = 0, 1, …, N – 1. Тогда z-изображе-
ние тока как реакции на единичное управляющее воздействие x(z, 0) = z/z – 1 примет вид
i* (z,ε) = |
|
K |
|
ze jω0Tε |
ze−σTε |
|
|||||||||
|
|
|
|
|
|
|
|
− |
|
|
|
|
|
× |
|
|
|
|
|
|
jω |
T |
z −e |
−σTε |
|||||||
|
σ+ jω0 z −e |
0 |
|
|
|
|
|||||||||
N −1 |
|
|
|
|
z −e jω0T |
|
|
|
|
|
|||||
×∑ |
e |
(N, k) |
|
|
|
|
|
|
. |
|
|
||||
|
j |
ω T + |
2πk |
|
|
|
|||||||||
k =0 |
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|||
|
|
|
|
|
|
z −e |
|
|
N |
|
|
|
|
|
|
Обратное z-преобразование позволяет вернуться к оригиналу в виде решетчатых функций в комплексной форме записи:
|
|
|
|
|
|
|
|
|
K |
|
|
N −1 |
|
|
|
|
|
|
i* (k, n,ε) = |
|
|
|
|
|
∑ |
e |
(N, k)× |
|
|||||||||
|
σ+ jω |
|
||||||||||||||||
|
|
|
|
|
|
|
k =0 |
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
j |
ω T +2πk |
(n+ε) |
|
|
|
|
|
|
|||||||
|
|
|
|
0 |
|
|
|
|
|
|
|
|
−e−σTε × |
|
||||
|
× e |
|
|
|
|
N |
|
|
|
|
|
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
j |
ω T + |
2π |
k (n+1) |
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
||||||||
|
|
|
0 |
|
N |
|
|
|
|
−e−σT (n+1) |
|
|||||||
|
|
e |
|
|
|
|
|
|
|
|||||||||
|
× |
|
|
|
|
|
|
|
|
|
|
|
|
|
+ |
|
|
|
|
|
|
j |
ω |
|
T + |
2 |
π |
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||
|
|
|
|
|
|
0 |
|
|
−e−σT |
|
||||||||
|
|
|
e |
|
|
|
|
N |
|
|||||||||
|
|
|
|
|
|
|
|
j |
ω T +2πk n |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
0 |
N |
|
−e−σTn |
|
||||
+ e |
j(ω T −σTε) |
|
e |
|
|
|
. (26) |
|||||||||||
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
Построение непрерывной кривой тока i(t) требует, чтобы значения дискретного n = 0, 1, 2, ... и непрерывного τ = 0…T аргументов были связаны соотношениями
n = ∑ |
|
|
|
t −t |
i |
|
|
− |
|
|
t −t |
i+1 |
|
|
|
i |
, |
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||
|
|
|
|
|
|
|
|
|||||||||||
|
|
|
t −t |
|
|
|
|
|
t −t |
|
|
|
2 |
|||||
i=1,2,.. |
|
|
i |
|
|
|
|
|
+ |
|
|
|
(27) |
|||||
|
|
|
|
|
|
|
|
|
|
i 1 |
|
|
|
|
|
|||
|
|
ε = t −nT . |
|
|
|
|
|
|
||||||||||
|
|
|
|
|
|
|
T |
|
|
|
|
|
|
|
|
|||
Решение |
этой |
|
задачи упрощается |
|||||||||||||||
в пакете встроенных функции MathCad. Для этого в поле графика i(t) кроме соотношений (26) необходимо задать опе-
ратор мнимой части данного выражения Im(i*(k, n, ε)). Приведенная на рис. 7 кривая тока получена при Т = π/12; σ = 3,7; K = 1/3,7; N = 8. Не трудно заметить, что аналогичным образом можно получить реакцию ПИМ-преобразователя на управляющий сигнал любой другой формы. Сравнение кривых на рис. 7 показывает полную тождественность результатов расчета тока всеми тремя методами.
Список литературы
1.Розанов Ю.К. Полупроводниковые преобразователи со звеном повышенной частоты. – М.: Энергоатомиздат, 1987. – 184 с.
2.Розанов Ю.К., Рябчицкий М.В., Кваснюк А.А. Силовая электроника: учебник для вузов. – М.: Изд-во МЭИ, 2007. – 632 с.
3.Бутырин П.А., Васьковская Т.А., Алпатов М.Е. Исследование упрощенных математических моделей трансформаторов // Электротехника, электроэнергетика, электротехническая промышлен-
ность. – 2007. – № 1. – С. 10–12.
4.Сидоров С.Н. Алгоритмы управ-
ления двухоперационными вентилями в преобразователях с непосредственной связью // Электротехника. – 2001. – № 5. –
С. 6–12.
5.Способ широтно-импульсного регулирования напряжения на выходе сетевого преобразователя: пат. РФ 2110136 / Сидоров С.Н., Шикин Ю.Л. Бюл. № 12, 1998.
6.Способ прямого преобразования напряжения сетевого источника: пат. РФ
2250551 // С.Н. Сидоров. Бюл. № 11, 2005.
7.Цыпкин Я.З. Теория линейных импульсных систем. – М.: Физматгиз, 1963. – 968 с.
8.Управляемый выпрямитель в системах автоматического управления /
Н.В. Донской, А.Г. Иванов, В.М. Никитин, А.Д. Поздеев; под ред. А.Д. Поздеева. – М.: Энергоатомиздат, 1984. – 352 с.
9.Шипилло В.П., Зезюлькин Г.Г. Комплексные коммутационные функции
иих применение для исследования цепей с периодической ступенчатой модуляцией // Электричество. – 1982. –
№ 12. – С. 62–65.
10.Придатков А.Г., Исхаков А.С. Устойчивость вентильных преобразователей с системой управления интегрального типа // Электричество. – 1977. –
№ 10. – С. 39–44.
125

Секция 2 ЭЛЕКТРОМЕХАНИЧЕСКИЕ СИСТЕМЫ
УДК 622.64:621.313.13
ТРАНСПОРТНАЯ СИСТЕМА НА ОСНОВЕ КОМБИНИРОВАННЫХ ЛИНЕЙНЫХ ЭЛЕКТРОДВИГАТЕЛЕЙ
В.В. Тиунов
Пермский национальный исследовательский политехнический университет
Представлены принципы построения, конструкции, результаты исследований и характеристики разработанных электроприводов на основе комбинированных линейных асинхронных двигателей для транспортных систем перемещения и позиционирования тележек в герметизированных камерах технологических робототехнических комплексов, работающих в условиях агрессивных и токсичных сред.
Ключевые слова: робототехнические комплексы, транспортные системы, линейные электроприводы, перемещение и позиционирование тележек, комбинированные линейные асинхронные двигатели, конструкции, исследование, характеристики.
THE TRANSPORTATION SYSTEM ON THE BASE
OF COMBINED LINEAR ELECTRIC MOTORS
V.V. Tiunov
Perm National Research Polytechnic University
The principles of designing, the constructions, results of investigations and characteristics of created electric drives based on combined linear induction motors for trolleys movement and positioning inside the sealed chambers of the robots-equipped facilities working in aggressive and toxic medium are presented.
Keywords: robots-equipped facilities, transportations’ systems, linear electric drives, moving and positioning of trolleys, combined linear induction motors, constructions, investigations, characteristics.
|
Введение |
|
|
самую простую механическую конст- |
|
Создание |
безопасных |
герметизиро- |
рукцию, что в должной степени не обес- |
||
ванных систем технологического транс- |
печивается при использовании канатных |
||||
портирования и обработки агрессивных |
или цепных транспортеров, электромаг- |
||||
или экологически опасных объектов яв- |
нитных муфт или механизмов с магнит- |
||||
ляется важнейшей научно-технической |
ной связью. |
|
|||
проблемой. Решение данной задачи осо- |
Использование редукторных |
тяго- |
|||
бо усложняется при работе с радиоак- |
вых приводов на основе электрических |
||||
тивными материалами, когда стараются |
машин вращательного действия вызыва- |
||||
уменьшить применение |
электронных |
ет проблемы из-за проскальзывания ве- |
|||
систем управления и регулирования из- |
дущих колес тележек, а также проблемы |
||||
за вредного влияния на них ионизирую- |
с их точным позиционированием. Для |
||||
щих излучений. |
|
|
исключения влияния инерции |
ротора |
|
При этом для обеспечения высокой |
после отключения двигателя (при под- |
||||
надежности |
протяженные |
по |
длине |
ходе тележки к очередной технологиче- |
|
транспортные |
системы должны |
иметь |
ской позиции) нужно использовать са- |
||
126 |
|
|
|
|
|
мотормозящиеся двигатели или электромагнитные муфты, отсоединяющие вращающийся по инерции ротор от редуктора, или переводить двигатель в режим электрического торможения, или использовать иные, достаточно сложные, алгоритмы и схемы управления.
Всё это существенно усложняет электропривод и снижает его надежность. Кроме того, для питания движущихся тележек с установленным на них редукторным электроприводом (также повышающим вес тележек, что ухудшает условия для их управляемости) необходим токоподводящий кабель или скользящий токосъем, что также уменьшает надежность и безотказность работы всей системы электропривода.
Таким образом, весьма актуальной является задача по разработке электроприводов перемещения тележек специальных транспортных систем на основе иных типов электродвигателей, использование которых позволяет в существенной степени освободиться от отмеченных выше недостатков.
Применение линейных электродвигателей в специальных транспортных системах
В специальных транспортных системах всё чаще используют различные линейные электродвигатели, которые относятся к классу специальных электрических машин, так как их принципы работы, конструкции, размеры и системы управления должны быть тесно увязаны с рабочей установкой, для движения которой они предназначены. В описанных выше системах тяговое усилие транспортной тележки можно эффективно обеспечить бесконтактным путем (посредством бегущего электромагнитного поля индукторов). При этом усилие не будет зависеть от силы сцепления колес тележки с направляющими рельсами.
Согласно отечественным и зарубежным данным, применение таких линейных электродвигателей, например в атомной, химической и микробиологической промышленности, уже продемонстрировало их высокую эффективность и надежность.
Принцип действия линейных электродвигателей может быть различным. В частности, последние годы большое внимание уделяется линейным асинхронным двигателям (ЛАД) различных модификаций, линейным шаговым двигателям (ЛШД), линейным вентильным двигателям (ЛВД) и т.п.
Использование таких электродвигателей, например в условиях радиоактивных сред, позволило добиться существенных преимуществ по сравнению с использованием канатных или цепных транспортеров, а также, в целом ряде случаев, по сравнению с транспортными устройствами на основе механизмов с магнитной связью (с электромагнитными тяговыми муфтами).
В частности, электроприводы с ЛАД обладают значительно большей надежностью и долговечностью, требуют минимального ухода, могут быть надежно герметизированы и, следовательно, защищены от влияния агрессивной окружающей среды, обладают хорошей радиационной стойкостью. Более того, индукторы ЛАД могут быть вообще вынесены за пределы герметичной камеры с агрессивной средой, так как они способны передавать на тележку тяговое усилие посредством бегущего магнитного поля дистанционно, через стенку камеры. Это обеспечивает безопасную для персонала возможность замены или обслуживания индукторов двигателей и исключает их контакт с очень агрессивными жидкостями, например при дезактивациях.
127
Анализ показывает, что наиболее надежной является следующая конструктивная компоновка ЛАД: длинный односторонний многосекционный индуктор, устанавливаемый вне герметичной камеры вдоль всей трассы движения, и короткое рабочее тело, закрепленное на транспортной тележке, движущейся в этой камере. При этом тележка не нуждается в токоподводе при движении между технологическими точками остановки, а при фиксации ее в точках остановки токоподвод для питания установленных на тележке технологических роботов-манипуляторов может быть обеспечен с помощью герметизированных сильфонных штекерных соединителей.
Вместе с тем такая компоновка ЛАД обладает и существенными недостатками. В частности, при сохранении удовлетворительных характеристик ЛАД (с небольшим полюсным делением и стандартной частотой питающей сети 50 Гц) из-за больших немагнитных зазоров трудно получить достаточно низкие скорости движения тележки, требуемые по условиям безопасности, в этом случае необходимо применять частотный преобразователь значительной мощности, т.е. вся система будет иметь существенное энергопотребление и низкие коэффициенты полезного действия и мощности, усложняется ее обслуживание и снижается надежность эксплуатации.
Сказанное свидетельствует о том, что индукторы линейных электродвигателей всё же необходимо располагать внутри герметичной камеры, так как при этом существенно уменьшаются немагнитные зазоры между индуктором и рабочим телом. Секции индуктора могут помещаться в тонкие герметичные кожухи, например из немагнитной нержавеющей стали, или герметизироваться в виде моноблоков путем заливки устой-
128
чивыми к коррозии эпоксидными смолами или другими материалами.
Компоновка линейного двигателя остается прежней: длинный многосекционный индуктор внутри камеры и короткое рабочее тело, закрепленное на движущейся в ней тележке робототехнического комплекса. При этом возникает альтернатива: использовать линейные асинхронные двигатели, линейные шаговые двигатели или линейные вентильные двигатели.
Применение этих двигателей может обеспечить требуемую низкую скорость транспортировки объектов, позволяет выдерживать заданную тахограмму движения, дает перспективы решения проблемы точного позиционирования тележки в фиксированных точках остановки для проведения технологических операций над ее грузом, позволяет снизить энергопотребление системы.
Линейный электропривод (ЛЭП) на базе ЛШД и ЛВД сравнительно просто сочленяется с компьютером, так как эти двигатели являются электрическими машинами дискретного действия. Магнитопроводы их индукторов при низких частотах напряжения питания могут не шихтоваться, что упрощает и удешевляет конструкцию и технологию изготовления таких двигателей.
Вместе с тем ЛЭП на базе ЛШД и ЛВД обладает рядом существенных недостатков, главным из которых, по мнению специалистов, является сложность (а как следствие, низкая надежность и ремонтопригодность, высокая стоимость установки и обслуживания) системы управления, которая должна содержать комплекс электронных силовых и управляющих устройств.
Для этих двигателей характерны весьма жесткие требования к величине и постоянству воздушного зазора, влияние которого на их характеристики значи-
тельно выше, чем в ЛАД. При этом уве- |
электронной системой управления явля- |
||||||||||
личение воздушного зазора не только |
ется использование специальных комби- |
||||||||||
сильно уменьшает тяговое усилие двига- |
нированных |
линейных |
асинхронных |
||||||||
телей, но и существенно ухудшает каче- |
двигателей (КЛАД) модульного типа, |
||||||||||
ство движения: появляются рывки, опас- |
содержащих двигательные и тормозные |
||||||||||
ные для перевозимых манипуляторов и |
блоки. |
|
|
|
|
|
|||||
изделий. |
|
|
|
|
Принцип |
действия и |
|
конструкция |
|||
Стремление |
улучшить |
качество |
таких КЛАД весьма просты и обеспечи- |
||||||||
движения при увеличенных зазорах вы- |
вают высокую надежность работы гер- |
||||||||||
нуждает увеличивать число фаз двигате- |
метичных транспортных систем в усло- |
||||||||||
ля, что влечет за собой усложнение его |
виях специальных производств, напри- |
||||||||||
коммутатора, увеличение числа жил пи- |
мер с радиоактивной средой, где, с |
||||||||||
тающего кабеля и т.п. С ростом воздуш- |
учетом приведенного выше теоретиче- |
||||||||||
ного зазора |
приходится |
увеличивать |
ского анализа и практики внедрения, их |
||||||||
единичный шаг двигателя, что нежела- |
использование |
весьма |
|
рационально |
|||||||
тельно, так как в этом случае возрастает |
и эффективно. |
|
|
|
|
||||||
амплитуда колебаний рабочего тела око- |
Суть работы |
КЛАД |
|
заключается |
|||||||
ло точки остановки во время точного по- |
в сочетании двигательного режима, соз- |
||||||||||
зиционирования |
тележки. |
Применение |
даваемого разделенными плоскими од- |
||||||||
ЛШД и ЛВД также усложняет жесткую |
носторонними индукторами трехфазных |
||||||||||
точную фиксацию тележки на техноло- |
ЛАД, и режима динамического тормо- |
||||||||||
гических позициях в точках останова. |
жения, создаваемого разделенными пло- |
||||||||||
К определенным трудностям в про- |
скими |
односторонними |
|
тормозными |
|||||||
ектировании |
и |
применении |
силовых |
блоками на основе постоянных магни- |
|||||||
ЛШД и ЛВД для специальных транс- |
тов. При этом короткое рабочее тело, за- |
||||||||||
портных систем, работающих в герме- |
крепленное на транспортной тележке, |
||||||||||
тичных камерах с агрессивной средой, |
всегда при своем перемещении как ми- |
||||||||||
следует также отнести и существенно |
нимум перекрывает площадь одного дви- |
||||||||||
меньший, по сравнению с ЛАД, опыт |
гательного и одного тормозного блока. |
||||||||||
разработки и внедрения таких двигате- |
Компоновка ЛЭП перемещения те- |
||||||||||
лей на практике. Это может отрицатель- |
лежки на основе КЛАД схематично изо- |
||||||||||
но сказаться на качестве и темпах разра- |
бражена на рис. 1. Принцип действия |
||||||||||
ботки и внедрения новых проектов. Хотя |
КЛАД – это получение результирующей |
||||||||||
следует подчеркнуть, что заниматься |
силы при использовании действия обоих |
||||||||||
проблемами создания систем с такими |
блоков при движении рабочего тела. |
||||||||||
двигателями, с точки зрения перспекти- |
Исходя из этого работа КЛАД опи- |
||||||||||
вы их применения в будущем, необхо- |
сывается комбинацией двух режимов: |
||||||||||
димо. |
|
|
|
|
двигательного режима (создаваемого бе- |
||||||
Альтернативная конструкция |
гущим полем индукторов ЛАД) и тор- |
||||||||||
мозного |
режима, обеспечиваемого ста- |
||||||||||
линейного электродвигателя |
|||||||||||
ционарным (неподвижным) |
полем тор- |
||||||||||
для специальных транспортных |
|||||||||||
мозных |
блоков на |
основе |
постоянных |
||||||||
|
|
систем |
|
|
|||||||
|
|
|
|
магнитов. Сложение механических ха- |
|||||||
|
|
|
|
|
|||||||
Альтернативой применению слож- |
рактеристик от двигательных и тормоз- |
||||||||||
ных вариантов ЛЭП на основе ЛШД и |
ных блоков |
позволяет |
одновременно |
||||||||
ЛВД, а также на основе обычных ЛАД с |
уменьшить рабочую скорость движения |
||||||||||
|
|
|
|
|
|
|
|
|
|
129 |
|

ЛАД-1 |
N |
S N |
ЛАД-2 |
|
|
v0 |
N |
S N |
v0 |
|
v0 |
||
|
Короткое рабочее тело |
|
|
Сталь |
|
|
v |
|
|
|
|
Двигательный блок |
Медь |
Тормозной блок |
Двигательный блок |
|
|
|
|
Рис. 1. Структура комбинированных линейных асинхронных двигателей
тележки (что обусловливается требованиями технического задания) и повысить «жесткость» результирующей механической характеристики ЛЭП, что также является благоприятным фактором и улучшает параметры движения тележек.
Применение постоянных магнитов в тормозных блоках существенно упрощает систему ЛЭП, так как это наиболее простой и надежный вариант конструкции и тормозные блоки с постоянными магнитами не требуют электропитания. Однако, при необходимости, вместо тормозных блоков с постоянными магнитами может быть использован вариант применения в качестве тормозных блоков обычных индукторов ЛАД, обмотки которых питаются постоянным током (работа в режиме динамического торможения). Или для получения необходимых характеристик может быть применено двухтоковое питание индукторов основных двигательных блоков ЛЭП. При создании новых модификаций линейного электропривода данный вопрос требует дополнительной проработки с учетом конкретных параметров транспортной системы и требований технического задания заказчика.
Сочетание двигательного и тормозного режимов позволяет снизить и стабилизировать рабочую скорость движе-
ния тележки при питании индукторов ЛАД от стандартной трехфазной сети с частотой 50 Гц. При этом, как показала практика, для исключения ударов не нужно переводить ЛАД в режим «ползучей скорости» при подходе тележки к точкам остановки, а можно использовать механическое фиксирующее устройство с простым пружинным демпфером. Таким образом, в ЛЭП с КЛАД отпадает необходимость использовать для позиционирования специальную систему управления, которая обычно применяется в подобных транспортных системах на основе обычных двухсторонних или односторонних ЛАД и существенно усложняет систему в целом.
Кроме того, ограничивается возможность опасного неуправляемого движения и ударов тележки при аварийном исчезновении напряжения питания на тяговых ЛАД и устройствах позиционирования, так как под действием неподвижного поля постоянных магнитов тормозных блоков тележка плавно тормозится и останавливается. При подаче напряжения на тяговые ЛАД она легко продолжит движение в нужном направлении с любой точки остановки.
В соответствии с представленной концепцией использования КЛАД были разработаны, изготовлены и испытаны
130