1491
.pdfса электромагнита Mэм. Исходные данные: сила притяжения якоря к сердечнику Fz, допустимая относительная погрешность определения силы ε(Fz ),
зазор δ, длина якоря l. Требуется определить магнитодвижущую силу катушки iw, геометрические размеры электромагнита R1, R2, R3, h1, h2, l1, обеспечивающие заданную силу Fz при минимальной массе Mэм и известной погрешности ε(Fz ).
Рис. Эскиз электромагнита с обозначением размеров: 1 – намагничивающая катушка; 2 – сердечник; 3 – якорь
Масса электромагнита Mэм на основании рисунка определяется по формуле
M |
эм |
= |
πR2h +πR2h +π(R2 |
− R2 )h + |
||||||||
|
|
|
1 2 |
3 1 |
2 |
|
|
|
1 |
|
1 |
|
+π(R |
2 |
− R2 )(2h +δ) +πR2l |
|
ρ |
ст |
+ |
||||||
|
|
3 |
2 |
2 |
1 |
1 |
|
|
||||
|
|
+ π(R2 |
− R2 )(2h +δ)ρ |
м |
, |
|
|
(1) |
||||
|
|
|
|
2 |
1 |
2 |
|
|
|
|
|
|
где ρст, ρм – плотности стали и меди соответственно.
Для того чтобы в каждом элементе магнитной системы электромагнита магнитная индукция B была одинакова, сечения элементов должны иметь одинаковую площадь. На основании этого положения составим дополнительные условия:
πR2 |
= 2πR h , |
(2) |
|
1 |
1 |
1 |
|
πR12 = π(R32 − R22 ), |
(3) |
||
R2 = R1 +l, |
(4) |
||
l1 = 2h2 +δ. |
(5) |
||
Ограничения на силу притяжения представим в виде
Fz ≤ Fzp ≤ Fz (1+ε(F )), |
(6) |
где Fzp – вычисленное значение силы притяжения Fz.
Силу притяжения будем рассчитывать по формуле
|
|
1 |
|
1 |
2 |
|
|
Fp |
= |
|
∫∫ B (B, n)− |
|
B |
n dS , (7) |
|
µ0 |
2 |
||||||
|
|
S |
|
|
|||
где µ0 |
|
– |
магнитная |
|
постоянная, |
||
µ0 = 4π10−7 |
Гн/м; S – поверхность, ох- |
||||||
ватывающая якорь (или сердечник) и лежащая в среде с µ0; n – нормаль к поверхности S. Нас интересует z-состав-
ляющая силы Fzp = (Fp ,ez ).
Для определения Fp необходимо
решать уравнения плоскомеридианного магнитного поля, которые дополняют математическую модель магнитной системы электромагнита. При этом принимаем допущения: зависимость магнитной индукции от напряженности магнитного поля B(H) однозначна; среды изотропны. Начальное значение магнитной индукции в зазоре принимаем равным Bδ(0) =1 Тл.
Введем |
обозначения |
S |
п |
= πR2 ; |
|
Sок = l (2h2 +δ) = iw (kз j), где kз |
|
1 |
|||
– |
коэф- |
||||
|
|
|
|
|
181 |

фициент заполнения окна катушки по ме- |
коэффициент, учитывающий выпучива- |
|||||
ди; j – плотность тока в проводниках ка- |
ние магнитного потока. Тогда |
|
|
|||
тушки. |
|
|
|
Sп(0) = Fp 2µ0 (Bδ(0)2kв ). |
|
(11) |
Имеем два дополнительных условия: |
|
|
|
|||
S |
п |
−πR2 = 0, |
(8) |
По известным значениям S |
(0) |
и S(0) |
|
1 |
|
п |
ок |
||
Sок −lh2 = 0. |
(9) |
найдем h2(0) из условий |
|
|
||
Исключая с помощью соотношений
(2)–(5), (8), (9) параметры R1, R2, R3, h1, h2, l, l1, получим зависимость
Mэм = f (Sп, Sок, h2 ) .
Рассматривалось два метода оптимизации: метод множителей Лагранжа и лексикографический метод упорядочения. Применение метода Лагранжа к решению рассматриваемой задачи затруднено из-за наличия достаточно сложного ограничения (6). В связи с этим далее применяется второй метод. Ограничение
(6) преобразуем в целевую функцию вида
|
2 |
. |
J = Fzp − Fz (1 |
+ε(Fz )) |
Таким образом, приходим к задаче с двумя критериями, которые ранжируем следующим образом:
|
|
2 |
, |
J1 = Fzp − Fz (1 |
+ε(Fz )) |
|
J2 = Mэм .
Далее используем лексикографический метод упорядочения [2], модифицированный в связи с особенностями задачи: первая целевая функция зависит в основном от Sп и Sок, вторая – от h2.
Определим начальные значения Sп(0)
и Sок(0) , используя приближенные форму-
лы теории электрических аппаратов. Полагая магнитную проницаемость ферро-
магнетика |
|
|
µст = ∞, |
|
|
|
получим |
|||
iw = B(0)δ µ |
0 |
, откуда |
|
|
|
|
|
|||
δ |
|
|
|
|
|
|
|
|
|
|
|
|
|
Sок(0) |
= iw (kз j) |
м2. |
(10) |
||||
Силу притяжения рассчитываем по |
||||||||||
формуле |
F |
p |
= B(0)2k |
в |
(2µ |
S |
п |
), |
где kв – |
|
|
|
δ |
|
0 |
|
|
|
|||
dMэм |
= 0, |
d 2Mэм |
> 0 , |
|
|
||
dh |
dh2 |
||
2 |
|
2 |
|
а затем начальные приближения других параметров:
R1(0) = Sп(0) π, l(0) = Sок(0) |
(2h2(0) +δ), |
|||
R(0) = R(0) +l(0) |
, |
h(0) = 0,5R(0) , (12) |
||
2 |
1 |
|
1 |
1 |
R3(0) = R2(0)2 +(R1(0) +l(0) )2 .
Алгоритм решения обратной задачи для каждого n = 0,1, 2, ... состоит из сле-
дующих этапов:
1. Решаем прямую задачу расчета стационарного магнитного поля с пара-
метрами iw(n), R1(n), R2(n) , R3(n) h1(n) , h2(n) , l(n)
методом конечных элементов. В результате получим распределение магнитного поля, далее определим силу Fzp по фор-
муле (7).
2. Вычисляем значение первой целевой функции, подлежащей минимизации:
J1 = Fzp(n) − Fz (1+ε(Fz )) 2 ,
и проверяем выполнение условия
J |
1 |
≤ ε(F )2 |
F 2 . |
(13) |
|
z |
z |
|
3. Если условие (13) выполняется, то вычисляем искомое значение Mэм по формуле (1). Если условие (13) не выполняется, то переходим к этапу 4.
4. Вычисляем следующие приближения: iw(n+1) (Sок(n+1) ) и Sп(n+1) по формулам метода градиентного спуска:
182

iw(n+1) = iw(n) −t1 ∂∂(J1(n)) , iw
Sп(n+1) = Sп(n) −t2 ∂∂(J1(n))
Sп
где t1, t2 – шаги.
Составляющие gradJ1 вычисляются
путем решения прямых задач расчета стационарного магнитного поля.
5. Вычисляем h2(n+1) , решая уравнение dMэм  dh2 = 0 с новыми значениями
dh2 = 0 с новыми значениями
iw(n+1) и Sп(n+1) .
6.Вычисляем остальные параметры по формулам (12) с заменой верхнего индекса (0) на (n + 1).
7.Переходим к этапу 1.
Рассмотрим пример реализации предлагаемого метода оптимизации. Пусть требуется найти оптимальные размеры электромагнита броневого типа,
обеспечивающего |
при δ = 5 10−3 мм |
силу притяжения |
F = 25 Н; ε(F) =1 % |
при минимальной массе Mэм. Материал сердечника и якоря – сталь марки Steel1010; начальная индукция в зазоре Bδ =1 Тл, плотность тока в обмотке уп-
равления j = 3·106 А/м2, ρст = 7800 кг/м3,
ρм =8900 кг/м3, kв =1,5, kз = 0,7.
Вычисляем по формуле (11) Sп =168 10−6 м2, принимая Sп = πR12 м2, определяем R1(0) = 7,3 10−3 м. Решая урав-
нение (1), получаем h2(0) = 96,25 10−3 м. Найдем другие параметры по фор-
мулам (12): h(0) |
= 3,65 10−3 м, l(0) |
= |
|
|
1 |
|
|
= 4,79 10−3 м, |
|
R(0) =12,10 10−3 |
м, |
|
|
2 |
|
R(0) =14,13 10−3 |
м. |
|
|
3 |
|
|
|
Зная начальные значения параметров, перейдем к их уточнению путем решения обратных задач.
На шестой итерации определены
iw(6) = 2431, |
R(6) =10,2 10−3 |
м; |
h(6) = |
|
|
|
1 |
|
2 |
=86,84 10−3 |
м, |
l(6) = 6,47 10−3 |
м, |
R(6) = |
|
|
|
|
2 |
=16,67 10−3 |
м, |
R(6) =19,54 10−3 |
м. Для |
|
|
|
3 |
|
|
полученных параметров имеем J1(6) = 0,06 и J1(6) < ε2 (Fz ) Fz2. Решение задачи завершено. Принимаем рассчитанные параметры за искомые.
На основании проведенного исследования можно сделать следующие выводы:
Предложен метод параметрического синтеза электромагнитов броневого типа минимальной массы. Метод основан на решении обратной задачи стационарного магнитного поля и преобразовании ограничения на силу притяжения в целевую функцию. Минимизация последней выполняется численным методом градиентного спуска. Минимизация второй целевой функции (массы электромагнита) осуществляется аналитически. Целевые функции ранжируются по важности.
В методе используется модификация лексикографического метода упорядочения, учитывающая особенности объекта проектирования: каждая целевая функция зависит от ограниченного числа параметров объекта.
Метод отличается высокой эффективностью и может быть использован для проектирования электромагнитов других типов.
Список литературы
1.Бахвалов Ю.А., Горбатенко Н.И., Гречихин В.В. Обратные задачи электротехники: монография. – Новочеркасск: Изд-во журнала «Известия вузов. Электромеханика», 2014. – 211 с.
2.Корнеенко В.П. Методы оптими-
зации. – М.: Высш. шк., 2007. – 664 с.
3.Самарский А.А., Вабищевич Л.П. Численные методы решения обратных задач математической физики. – М.:
ЛКИ, 2009. – 480 с.
183
УДК 621.313
ЭКСПЕРИМЕНТАЛЬНОЕ И РАСЧЕТНОЕ, НА ОСНОВЕ ПОЛЕВЫХ МОДЕЛЕЙ, ИССЛЕДОВАНИЕ ЭЛЕКТРОМЕХАНИЧЕСКИХ ПРОЦЕССОВ В АСИНХРОННЫХ МАШИНАХ, ОБЪЕДИНЕННЫХ ОБЩИМ ВАЛОМ, ПРИ ИСПЫТАНИЯХ МЕТОДОМ ВЗАИМНОЙ НАГРУЗКИ
Ю.Б. Казаков, И.А. Палилов
Ивановский государственный энергетический университет
Энергоэффективные постпроектные испытания асинхронных машин могут проводиться методом взаимной нагрузки в системе двигатель – генератор, где машины объединены общим валом. Разработан лабораторный опытный стенд для экспериментальных исследований электромеханических характеристик двухмашинного агрегата. Выполнено моделирование такой системы испытаний с использованием взаимосвязанных моделей электромагнитных полей двигателя и генератора. Проведено экспериментальное и расчетное, на основе полевых моделей, исследование электромеханических процессов в асинхронных машинах при испытаниях методом взаимной нагрузки. Сравнительный анализ характеристик подтвердил адекватность разработанных моделей.
Ключевые слова: полевая модель, электромагнитные процессы, асинхронный двигатель, асинхронный генератор, испытания, метод взаимной нагрузки.
THE EXPERIMENTAL AND CALCULATED, BASED ON FIELD MODELS, STUDIES ELECTROMECHANICAL PROCESSES IN ASYNCHRONOUS MACHINES, UNITED BY A COMMON SHAFT, THE TEST METHODS MUTUAL LOAD
Yu.B. Kazakov, I.A. Palilov
Ivanovo State Power University
Energy-efficient testing of asynchronous machines can be carried out by the mutual stress in the system motor-generator, where the machines are combined on-conductive shaft. A laboratory prototype stand for experimental studies of electromechanical characteristics Two-machine units. Modeling of a test system using interlocking patterns of electromagnetic fields and the motor generator. The experimental and calculated on the basis of field models, the study of electromechanical processes in induction machines in tests by mutual load. Comparative analysis of performance confirmed the adequacy of the developed models.
Keywords: field model, electromagnetic processes, induction motor, asynchronous generator, test, mutual load method.
Энергоэффективные приемо-сдаточ- ные испытания асинхронных машин могут проводиться методом взаимной нагрузки в системе двигатель – генератор с соединенными валами и рекуперацией энергии в сеть, где асинхронный двигатель подключен к преобразователю частоты (ПЧ) с регулировкой частоты питающего напряжения, а асинхронный генератор включен на сеть постоянной частоты. С возрастанием мощности испытуемых асинхронных машин и возможными более тяжелыми последствиями неверных решений становится не-
обходимым предварительное математическое моделирование, расчетное и экспериментальное исследование работы таких систем.
Моделирование системы испытаний асинхронный двигатель – асинхронный генератор может быть выполнено на разном уровне. В работе [1] предложено осуществлять моделирование двухмашинного агрегата с использованием общих соотношений для асинхронных машин без учета насыщения, изменения сопротивлений машин с изменением режима работы и нагрузки, несинусои-
184
дальности выходного напряжения ПЧ. Корректное моделирование установившихся и динамических процессов в системе асинхронные двигатель – генератор требует одновременного совместного использования моделей и генератора, и двигателя с их взаимоувязкой по результирующему моменту на валу. Разработка уточненных взаимосвязанных моделей машин в такой системе целесообразна на основе теории электромагнитного поля при реализации динамической взаимосвязи нескольких двухмерных полевых моделей асинхронных машин, работающих с общим валом [2].
Электромагнитное поле в электрической машине в плоскопараллельной постановке описывается уравнением, являющимся следствием системы уравнений Максвелла:
rot |
1 |
rot |
|
|
= |
|
ст + γ |
∂ |
A |
|
+ |
|
||||||||
A |
j |
|
||||||||||||||||||
µ |
∂t |
|
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||
+ γ( |
|
|
|
)−γ |
|
|
|
|
dS, |
|
||||||||||
|
|
×rot |
|
|
1 |
∫ |
∂A |
(1) |
||||||||||||
v |
A |
|||||||||||||||||||
S |
∂t |
|
||||||||||||||||||
где jcт – вектор сторонней плотности тока; γ – удельная электропроводность;
v – вектор скорости проводящих частей, движущихся в электромагнитном поле; µ – магнитная проницаемость (переменная величина, функция напряженности);
S – сечение проводящего стержня; A – векторный магнитный потенциал, определяемый по величине индукции В соотношением
В |
= rot |
A |
. |
(2) |
При конечно-элементном моделировании электромагнитных полей в обеих машинах значение индукции (2) и плотности тока в пределах каждого отдельного конечного элемента расчетной области представляются неизменным. Для того чтобы описать полную картину поля, необходимо решить систему, со-
стоящую из уравнений вида (1), размерность которой равна числу конечных элементов. Для упрощения решения уравнения (1) частная производная от векторного магнитного потенциала по времени представляется в виде конечной разности
∂A = Ai − Aj . ∂t ∆t
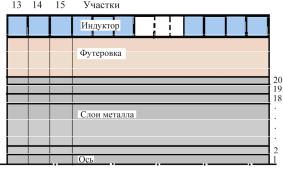
Вращение вала, общего для обеих машин, учитывается изменением угла поворота вала, что приводит к изменениям угловых положений роторов и в двигателе, и в генераторе. Каждый раз при изменении угла поворота вала меняется геометрия расчетных областей двигателя и генератора, что приводит к необходимости многократного и связанного перестраивания сеток конечных элементов двигателя (Д) и генератора (Г) на каждой итерации связанного расчета электромагнитных полей в обеих машинах (рис. 1).
Рис. 1. Конечно-элементная сетка
вдвухмашинном агрегате
Сэтой целью уравнение (1) дополняется уравнением движения вала при действии на вал электромагнитных моментов двигателя Мд, генератора Мг, статического момента Мст с моментами инерции Jд и Jг при угловой частоте
вращения вала ω:
Mд + Mг = Mст −(Jд + Jг ) ddωt ,
в котором производная от угловой скорости ω по времени тоже выражена в конечно-разностном виде.
185


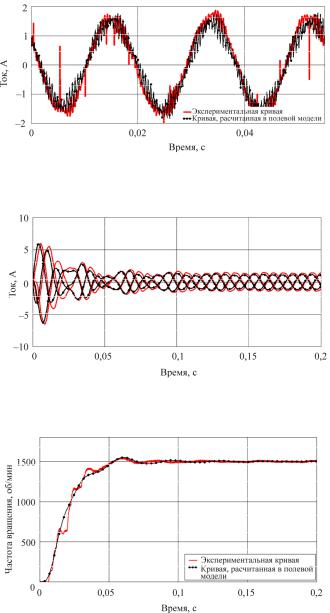
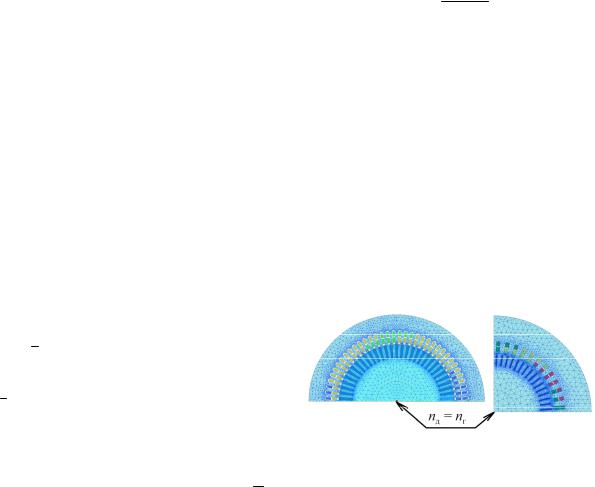
минальной нагрузке при питании от ПЧ |
стью совпадают, погрешность не пре- |
с частотой 54 Гц. Несущая частота |
вышает 7 %. Это подтверждает доста- |
ШИМ 2 кГц. Представлена эксперимен- |
точную точность полевой модели в |
тальная и расчетная кривые. |
динамическом и статическом режимах. |
При исследовании динамических ре- |
Получены экспериментальные и рас- |
жимов рассматривался пуск двухмашин- |
четные кривые разгона двухмашинного |
ного агрегата без механической нагрузки |
агрегата при пуске без нагрузки со сто- |
на валу. На рис. 7 показаны кривые изме- |
роны генератора и на общем валу (рис. 8). |
нения токов трех фаз статора двигателя |
Машина разгоняется и за 0,1 с выходит |
при пуске, полученные экспериментально |
на установившийся режим. Эксперимен- |
и путем расчета в полевой модели. |
тальная кривая разгона и кривая, рассчи- |
По всем трем фазам кривые дина- |
танная в полевой модели, совпадают с не- |
мического режима с достаточной точно- |
значительной погрешностью. |
Рис. 6. Зависимость тока в фазе от времени при работе АД от ПЧ с ШИМ при испытаниях методом взаимной нагрузки
Рис. 7. Экспериментальные и расчетные зависимости токов фаз статора двигателя при пуске двухмашинного агрегата
Рис. 8. Кривая разгона агрегата асинхронный двигатель – асинхронный генератор
188
На основании проведенного иссле- |
испытаний крупных асинхронных элек- |
|||||||||
дования можно сделать следующие вы- |
тродвигателей // Известия Томск. поли- |
|||||||||
воды: |
|
|
|
|
|
техн. ун-та. – 2009. – Т. 315, № 4. – |
||||
Выполнено экспериментальное |
и |
С. 69–73. |
|
|
|
|
||||
расчетное, на основе полевых моделей, |
2. Казаков Ю.Б., Палилов И.А. Мо- |
|||||||||
исследование электромеханических про- |
делирование |
энергоэффективной |
авто- |
|||||||
цессов в асинхронных машинах, объеди- |
матизированной |
системы |
испытаний |
|||||||
ненных общим валом, при испытаниях |
тяговых электрических машин с исполь- |
|||||||||
методом взаимной нагрузки. |
|
|
зованием полевых моделей // Автомати- |
|||||||
Разработанная математическая |
мо- |
зация в электроэнергетике и электротех- |
||||||||
дель работы |
системы |
асинхронный |
нике: материалы I Междунар. науч.-техн. |
|||||||
двигатель |
– |
асинхронный |
генератор |
конф. – Пермь: Изд-во Перм. нац. исслед. |
||||||
с общим валом при испытаниях с |
политехн. ун-та, 2015. – С. 133–139. |
|
||||||||
рекуперацией энергии, основанная на |
3. Демирчян |
К.С., Чечурин |
В.Л. |
|||||||
расчете |
взаимосвязанного |
моделиро- |
Машинные |
расчеты электромагнитных |
||||||
вания электромагнитного поля в обеих |
полей. – М.: Высш. шк., 1986. – 240 с. |
|||||||||
асинхронных |
машинах, |
позволяет |
по |
4. Автоматизированный |
комплекс |
|||||
лучать адекватные расчетные резуль- |
расчета |
переходных |
и установившихся |
|||
таты. |
режимов системы асинхронный ге- |
|||||
Список литературы |
нератор |
– |
асинхронный |
двигатель: |
||
свид. о гос. рег. программы для ЭВМ |
||||||
|
||||||
1. Бейерлейн Е.В. Обоснование |
№2014663172 |
/ |
Палилов |
И.А. – |
||
применения энергосберегающей схемы |
18.12.2014. |
|
|
|
||
189