

1491
.pdf0 до 10 МВар (для ЛР от –5 до +5 град), |
алгоритма: св-во о гос. регистрации про- |
требуется найти такие места размещения |
граммы для ЭВМ № 2012613690 / Швы- |
КУ (ЛР) и их параметры, чтобы суммар- |
ров И.В. – 19.04.2012. |
ные потери активной мощности в сети |
4. Оптимизация режима 30-узловой |
были минимальными. |
схемы с помощью пчелиного алгоритма: |
На рис. 4 представлена зависимость |
св-во о гос. регистрации программы для |
целевой функции (потерь активной |
ЭВМ № 2013613037 / Швыров И.В. – |
мощности) от числа итераций ЭА для за- |
21.03.2013. |
дачи размещения ЛР в ЭС. С помощью |
5. Pham D.T. The bees algorithm – |
ЭА при размещении ЛР и КУ удалось |
a novel tool for complex optimization prob- |
снизить потери активной мощности в ЭС |
lems // Intelligent Production Machines and |
до 8 и 7,95 МВт соответственно. |
Systems. – 2006. |
|
6. Ying Lin, Hua Chun Cai. Pseudo |
|
parallel ant colony optimization for con- |
|
tinuous functions // Third International |
|
Conference on Natural Computation, Com- |
|
puter Society. – 2007. |
Рис. 4. Зависимость целевой функции от числа итераций
Применение эволюционных алгоритмов в задачах с дискретными значениями переменных не требует какихлибо допущений и упрощений задачи. В результате оптимизации потери в системе уменьшились на 3,5 %, время расчета задачи снизилось почти в два раза.
Список литературы
1. Вычислительные модели потокораспределения в электрических системах / Б.И. Аюев, В.В. Давыдов, П.М. Ерохин, В.Г. Неуймин. – М.: Наука, 2008.
2.Поляхов Н.Д., Приходько И.А., Швыров И.В. Оптимальное размещение устройств FACTS в электрической системе с помощью эволюционных алгоритмов // Образование и наука XXI ве-
ка. – 2013. – Т. 14.
3.Комплексная оптимизация 30-уз- ловой схемы с помощью генетического
111
УДК 621.376.54:62.83
ПРЯМОЕ ИМПУЛЬСНО-МОДУЛЯЦИОННОЕ ПРЕОБРАЗОВАНИЕ СЕТЕВОГО НАПРЯЖЕНИЯ
Ю.К. Розанов1, С.Н. Сидоров2, Я.К. Старостина2
1 Национальный исследовательский университет «Московский энергетический институт»
2 Ульяновский государственный технический университет
Рассматривается алгоритм управления среднетактовыми значениями напряжения в непосредственных преобразователях с высокочастотной широтно-импульсной модуляцией, обеспечивающий независимость формы тока активно-индуктивной нагрузки от низкочастотных изменений сетевого напряжения.
Ключевые слова: качество выходного напряжения, устройства однократного преобразования сетевого напряжения, высокочастотная широтно-импульсная модуляция.
FORWARD IMPULSIVE AND MODULAR TRANSFORMING
OF CIRCUIT VOLTAGE
Yu.K. Rosanov1, S.N. Sidorov2, Ya.K. Starostina2
1 National Research University “Moscow Power Ingineering Institute”
2 Ulyanovsk State Technical University
High freguency pulse modulation processes of net voltage in primary windings of matching transformers are considered. They enable the current to vary independently from low freguency pulses and current fluctuations without applying huge balancing filters on pulse transformer terminals. Diagrams, analysis and synthesis technigues of impulse transformers.
Keywords: quality of the output voltage, device one-time conversion of the mains voltage, high frequency pulse width modulation.
Введение
Одна из тенденций в области разработки источников вторичного электропитания состоит в устранении многоэтапности преобразования сетевого напряжения с частичной передачей функций промежуточных звеньев и пассивных фильтров ключевым элементам. В условиях прямого однократного преобразования сетевого напряжения основная роль в обеспечении заданных параметров электроэнергии отводится методам высокочастотной импульсной модуляции [1, 2]. Прямое импульсномодуляционное (ПИМ) преобразование привлекает возможностью сокращения цепи «питающая сеть – нагрузка», что может оказаться целесообразным в устройствах различного функционального назначения. Так, например, в преобразователях переменного/постоянного на-
пряжения это может привести к исключению громоздких сглаживающих фильтров, в то время как в преобразователях переменного/переменного напряжения с высокочастотным промежуточным преобразованием – к устранению традиционных элементов звена постоянного тока. Анализу свойств и возможностей ПИМ в указанных схемах посвящена данная работа.
Особенности ПИМ преобразования переменного/постоянного напряжения
Рассмотрим преобразование на примере диодно-транзисторного преобразователя, выполненного по однофазной мостовой полууправляемой схеме выпрямления (рис. 1, а). Допущение идеальности вентилей и мгновенности коммутаций позволяют представить расчетную схему замещения данного вы-
112
прямителя в виде RL-цепи, периодические высокочастотные подключения которой к источнику сетевого напряжения чередуются с шунтированием нагрузки во время пауз. Поставим задачу модуляционного устранения из гармонического состава выпрямленного напряжения и тока низкочастотной сетевой составляющей [4–6]. Для этого запишем решения дифференциальных уравнений для тока активно-индуктивной нагрузки на интервалах импульса и паузы выходного напряжения внутри n-го такта высокой несущей частоты (см. рис. 1, б):
|
(t) = cos(ϕ1 ) sin (ω0t −ϕ1 + nT ) + |
|
||
i1n |
|
|||
+ (i1n (0) −cos(ϕ1 ) sin (nT −ϕ1 ))× |
|
|||
|
|
|
|
|
×exp(−t / τ1 ); |
(1) |
|||
i |
(t) = i |
(t |
)× |
|
2n |
1n |
1n |
|
|
|
|
|
|
|
×exp(−(t −t1n ) / τ2 )при 0 ≤ t ≤T , |
|
|||
где Т − тактовый период несущей частоты, t1n −длительность импульса напряжения внутри n-го такта; φ1, φ2 – фазовый угол тока на интервалах импульса и паузы выходного напряжения ed; τ1, τ2 – постоянные времени цепи на указанных интервалах; ω0 – круговая частота сети.
Подставляя выражение тока i1n(t1n) на границе указанных интервалов из первого во второе уравнение системы (1), получаем разностное уравнение, связывающее значения тока нагрузки выпрямителя в начале и конце n-го такта:
i[(n +1)Т] = i[nТ] exp(−(t1 / τ1 +t2 / τ2 ))+
+ cos(ϕ ) sin (ω t |
−ϕ + nT )× |
|
|
1 |
0 1 |
1 |
|
×exp(−t2 / τ2 ) −sin (nT −ϕ1 )× |
|
||
×exp(−(t1 / τ1 +t2 / τ2 )) , |
(2) |
||
где i[nТ] = i1n (0); |
i[(n +1)Т] = i2n (T ) |
– |
|
значения тока в начале при t = 0 и конце при t = Т периода несущей частоты соответственно.
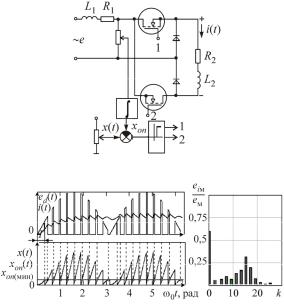
а
бв
Рис. 1. Модуляционные процессы выравнивания вольт-секундных значений напряжения на выходе ПИМ-преобразователя: а – один из вариантов исполнения ПИМ-преобразователя по однофазной мостовой полууправляемой схеме выпрямления; б – диаграммы выходного напряжения ed(t) и тока i(t) управляющего x(t) и опорного xоп(t) сигналов; в – приведенные к амплитуде сетевого напряжения составляющие выпрямленного напряжения в функции порядкового номера гармо-
ники k = 0, 1, 2, … fk /50
Приравнивая значения тока на границах рассматриваемого промежутка времени i[(n +1)Т] = i[nТ], получаем усло-
вие, которому должны удовлетворять интервалы между переключениями t1n, t2n = = Т – t1n для поддержания постоянства мгновенных значений тока активно-ин- дуктивной нагрузки в установившемся режиме
i[nT ] = |
( |
cos(ϕ )sin (ω t −ϕ + nT )× |
|
|
1 |
0 1 1 |
|
×exp(−t2 / τ2 ) −
−sin (nT −ϕ1 )×exp(−(t1 / τ1 +t2 / τ2 )) )/
/ (1−exp(−(t1 / τ1 +t2 / τ2 ))). |
(3) |
Трансцендентная форма и большое число переменных затрудняют исследование данного выражения. Для упрощения анализа рассмотрим предельное зна-
113
чение тока, которое можно получить в результате увеличения постоянной времени цепи
limi[nТ] = |
e−t2n /τ2 S |
|
|
n |
|
||
e−t2n /τ2 −1 |
|
|
|
при τ1 → ∞; φ1 → π/2. |
(4) |
||
Из выражения (4) видно, что постоянство дискретных значений тока i[nТ] = = const достигается выравниванием вольт-секундных площадей импульсов, а также пауз между ними в течение всего периода повторяемости выпрямленного напряжения Tп = 2π/mω0:
nT +ω t |
|
Sn = ∫0 1n sin (ω0t −ϕ1 )dt = |
|
nT |
|
sin(nT ) −sin (nT +ω0t1n ) = const; |
|
t2n = const, |
(5) |
причем данные меры будут тем эффективнее, чем больше реактивная составляющая в составе полного сопротивления цепи ω0(L1 + L2) → ∞. Результатом служит устранение в гармоническом составе выпрямленного напряжения составляющей с частотой сетевых пульсаций mω0, на что указывает спектрограмма этого напряжения на рис. 1, в. Подтверждением практической реализуемости данного режима служит условие устойчивости периодического импульсного процесса. Можно видеть, что данное условие выполняется на кратных частотах переключений Тп/Т = N (N = 1, 2, ...), придавая процессу признаки асимптотической устойчивости [7–10]:
|
∂i[(n +1)Т] |
= |
∂i[(n +1)Т] |
/ |
|
∂i[nТ] |
<1, |
|
(6) |
||||||||||||||
|
|
∂i[nТ] |
|
|
|
∂i |
(t |
) |
|
|
∂i |
(t |
|
) |
|
||||||||
|
|
|
|
|
|
|
|
|
1n |
1n |
|
|
|
|
1n |
1n |
|
|
|
|
|
|
|
где |
|
∂i[(n +1)Т] |
= exp(−t |
|
/τ ); |
∂i[nТ] |
|
= |
|||||||||||||||
|
|
|
∂i |
|
(t |
) |
|||||||||||||||||
|
|
|
∂i |
(t |
|
) |
|
|
|
1n |
1 |
|
|
|
|||||||||
|
|
|
1n |
1n |
|
|
|
|
|
|
|
|
|
|
|
1n |
1n |
|
|
|
|||
= exp(t2n /τ2 ) при t1n + t2n = T.
В свою очередь, уменьшение постоянных времени τ1 → 0, τ2 → 0 приводит к появлению в выражении (4) нулевого корня, говорящего об отсутствии единственного решения, а значит, о возникновении нейтрального типа устойчивости. Следовательно, уменьшение электромагнитной инерционности цепи превращает равенство вольт-секундных площадей импульсного напряжения из достаточного в одно из необходимых условий решения поставленной задачи.
Согласно способу ШИМ-2, переключения вентилей в режиме ПИМ задаются равенством управляющего сигнала уставки x(t) и циклически изменяющегося опорного сигнала xоп(t). В соответствии с интегральной версией ШИМ сигнал xоп(t) можно получить периодическим интегрированием выпрямленного напряжения и обнулением интегратора в тактовые моменты времени (см. рис. 1, б). Однако этот способ не полностью удовлетворяет требованию (4), так как амплитудные значения сигнала xоп(t) и длительность пауз между импульсами не остаются постоянными. Покажем, что эта особенность ведет к недоиспользованию сетевого напряжения питания. Из диаграмм рис. 1, б видно, что для избежания режима насыщения изменения сигнала уставки должны быть ограничены минимальной амплитудой опорного сигнала x(t) ≤ xоп(мин). Выполнение этого условия при Т = const ведет к возникновению значительных пауз между импульсами, снижая коэффициент использования сетевого напряжения Ku = евых/евх < 1. Данное явление усугубляется увеличением несущей частоты, создавая препятствия для работы на частотах порядка десятков и сотен килогерц. Зависимость Ku(f) можно оценить, вычисляя отношение площадей под кривыми импульсно-регулируемого
114

и нерегулируемого напряжений на выходе m-пульсного выпрямителя
|
|
|
|
|
N |
|
|
|
|
|
|
|
|
|
Ku = |
∑edn |
= |
S0 N |
|
|
|
|
|
|
|
n=1 |
, |
(7) |
||||
|
|
|
|
ed 0 |
|
|||||
|
|
|
|
|
|
Sмакс |
|
|||
где S0 − усредненная вольт-секундная |
||||||||||
площадь |
|
одного |
импульса, |
S0 = |
||||||
= |
1 |
Т sin |
π(m −2) |
+ω0t dω0t; |
Sмакс − |
|||||
Tп |
|
|||||||||
|
∫0 |
|
2m |
|
|
|||||
максимальное среднее выпрямленное напряжение на выходе нерегулируе-
мого выпрямителя, Sмакс = 1 ×
Tп
Т |
|
π(m −2) |
|
|
|
π |
|
|
|
×∫п sin |
+ω0t dω0t = m sin |
|
; |
||||||
|
|
||||||||
0 |
2m |
|
π |
m |
|
||||
N − кратность отношения несущей частоты к частоте повторяемости нерегули-
руемого выпрямителя, |
N = |
Tп |
= |
f |
. По- |
|
|
||||
|
|
Т |
fп |
||
лученные на рис. 2 с помощью выражения (7) графики Ku(f) демонстрируют реальную возможность использования ПИМ при Т = const на высоких частотах лишь в многопульсных схемах выпрямления при m ≥ 3.
Рис. 2. Зависимость коэффициента использования сетевого напряжения в функции несущей частоты модуляции Kи(f): 1 – для m = 3-пульсной схемы выпрямления; 2 – для m = 2-пульсной схемы выпрямления
Рассмотрение альтернативного варианта, способного расширить частот-
ную полосу пропускания ПИМ, приводится ниже на примере преобразователя переменного/переменного напряжения.
Особенности ПИМ преобразования переменного/переменного напряжения в трансформаторных цепях промежуточного повышения частоты
Рассмотрение проведем на примере двухтактного импульсного преобразователя с нулевым выводом трансформатора (рис. 3, а, б). Согласно второму варианту реализации ПИМ формирование опорного сигнала в этих схемах осуществляется непрерывным интегрированием модульного значения сетевого напряжения. Как показано на диаграммах рис. 3, в, процесс должен сопровождаться мгновенным сбросом выходного сигнала интегратора в моменты достижения этим сигналом некого постоянного порогового уровня xоп(t) ≥ xопм.
Полагается, что переключения транзисторных ключей в схеме рис. 3, а происходят в противофазе в указанные моменты времени. Эти переключения способны привести к появлению во вторичной обмотке трансформатора нерегулируемого высокочастотного напряжения евых.м, изменяющегося под воздействием нескольких видов импульсной модуляции: амплитудной со стороны сети и комбинированной (широтночастотной) со стороны управляющего входа. При x(t) = const данный процесс ведет к выравниванию вольт-секундных
площадей |
под кривой |
евых.м, которые, |
с целью |
наглядности, |
выделены на |
рис. 3, в, г сплошной штриховкой. Не трудно заметить, что при τ → ∞ этот процесс способен, как и ранее, устранить в составе выходного напряжения низкочастотную составляющую, обеспечив постоянство отклонений тока между соседними переключениями вентилей. Достигаемое улучшение формы тока i(t)
115
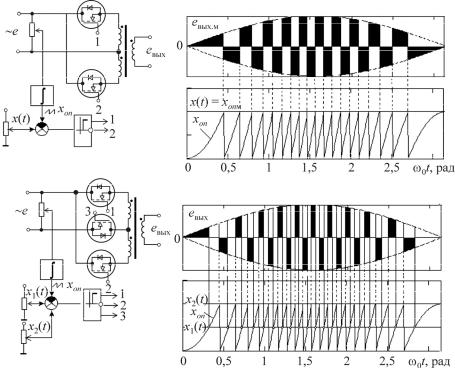
является результатом автоматического изменения частоты переключений (Т ≠ ≠ const), происходящего вслед за изменениями огибающей сетевого напряжения. Видно, что в отличие от рассмотренного варианта, реализация данного способа ПИМ не требует создания нулевых пауз и потому не ведет к снижению максимального значения выходного напряжения. При этом не исключается возможность плавного регулирования этого напряжения евых = 0…евых.м, для чего в схеме рис. 3, б потребуется еще один транзисторный ключ, а формирование управляющих импульсов, согласно рис. 3, г, должно происходить в моменты равенства сигналов x1(t) = xоп(t), где x1(t) = 0…х2; х2 = xоп.м. Неявная форма задания моментов переключений затрудняет гармонический анализ получаемого напряжения евых.м, поэтому сначала проведем рассмотрение бли-
а
б
жайшего аналога – преобразователя, работающего при равноинтервальных переключениях. Из диаграмм рис. 4, а видно, что этот процесс сопровождается амплитудной модуляцией напряжения е(t) и тока нагрузки i(t). При условии, что частота модуляции находится в четном отношении к частоте сети k = f/50 = = 2, 4, …, состав этого напряжения определится умножением сетевого напряжения на знакопеременную переключательную функцию:
|
|
|
e(t, k) = h(t, k) sin(ω0t), |
(8) |
||
где |
h(t, k) – коммутационная |
функция |
||||
в |
|
форме |
ряда Фурье, |
h(t, k) = |
||
|
4 |
∞ |
1 |
|
|
|
= |
∑ |
|
sin ((2i −1)ω0kt ); sin(ω0t) – |
|||
|
2i −1 |
|||||
|
πi=1,2,3.. |
|
|
|||
сетевое напряжение в относительной системе единиц. Раскрывая данное выражение, представим его в виде тригонометрического ряда
в
г
Рис. 3. Модуляционные процессы ПИМ-преобразования переменного/переменного напряжения: схема нерегулируемого (а) и регулируемого (б) вариантов преобразователя с трансформаторным звеном повышенной частоты; диаграммы нерегулируемого eвых.м (в) и регулируемого напряжений eвых(t)(г) на выходе силовой цепи задающего x(t) (б), x1(t) (г) и опорного xоп(t) сигналов в управляющей цепи преобразователя
116
e(t, k) = π2 cos(k −1)ω0t −cos(k +1)ω0t +
|
+ |
1 cos(3k −1)ω t − |
|
|
|
|
|
3 |
0 |
|
|
|
|
|
|
|
|
− |
1 cos(3k +1)ω0t +... |
, |
(9) |
||
|
3 |
|
|
|
|
из которого следует, что указанное напряжение состоит из так называемых комбинационных боковых гармоник нечетного порядка с частотами ((2i – 1)k ±
± 1)ω0, где ω0 – круговая частота сети; i = 1, 2, 3, … – натуральный ряд чисел. Амплитудные значения этих гармоник обратно пропорциональны среднему порядковому номеру каждой пары (рис. 4, б). При нечетном соотношении частот модуляции и сети k = 1, 3, … в гармоническом составе напряжения кроме указанных гармоник появляются основная составляющая несущей частоты kω0
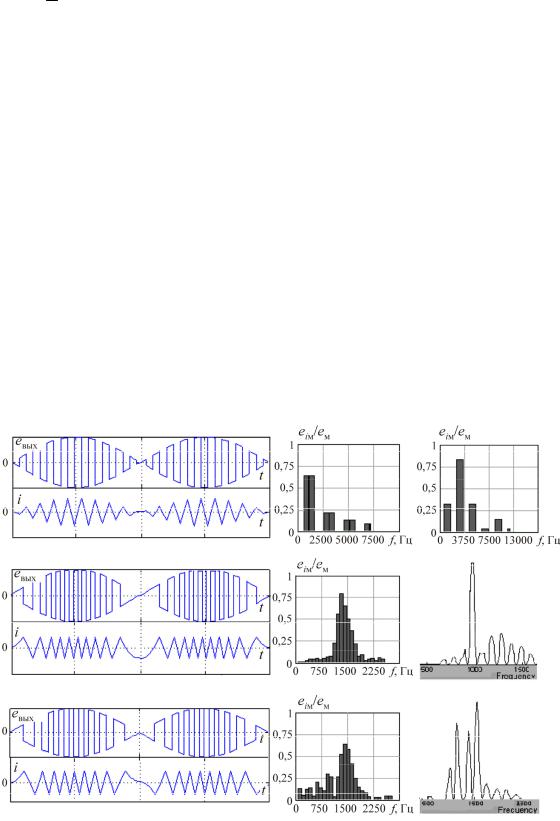
и кратные ей нечетные гармоники порядка (2i – 1)kω0 (рис. 4, в). Отрицательное влияние сетевых пульсаций на качество выходного напряжения и тока проявляется в полной мере в виде низкочастотных изменений огибающей модулированного сигнала. Согласно теории амплитудно-импульсной модуляции (АИМ), эти изменения являются результатом попарного геометрического сложения боковых гармоник. Следовательно, попытки устранения пульсаций должны быть направлены на подавление указанных гармонических пар. То обстоятельство, что в процессе АИМ участвуют все комбинационные гармоники, объясняет невозможность решения данной задачи с помощью избирательных фильтров. Как показывают результаты компьютерного моделирования (рис. 4, г, и), такая возможность появляется
а |
б |
в |
г |
д |
е |
и |
ж |
з |
Рис. 4. Диаграммы напряжения, тока, а также спектрограммы напряжения, иллюстрирующие работу компьютерной модели ПИМ-преобразователя при равноинтервальных (а–в) и равноинтегральных переключениях при четной (г–е) и нечетной (ж–и) кратности отношений частот модуляции и сети
117
при выравнивании интегральных значе- |
как основной закон управления преобра- |
|||||||||||||||||||
ний импульсного напряжения, т.е. при |
зователем направляется на выравнива- |
|||||||||||||||||||
сочетании амплитудной и время- |
ние интегральных значений напряжения, |
|||||||||||||||||||
импульсной модуляции. Проведенный с |
гарантируя тем самым изменение индук- |
|||||||||||||||||||
помощью пакета SPTool (MatLаb) спек- |
ции в заданных пределах: |
|
|
|||||||||||||||||
тральный анализ подтвердил, что при |
|
|
|
1 |
nT +∆tи |
|
|
|
|
|
|
|||||||||
так называемых равноинтегральных пе- |
Bm = |
|
|
∫ |
|
Um sin w0tdw0t ≤ BS , |
||||||||||||||
w s |
|
|
||||||||||||||||||
реключениях |
в |
составе напряжения |
|
|
|
1 |
|
nT |
|
|
|
|
|
|
||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||
евых(t) отсутствуют как сетевая состав- |
где w1, s – количество витков первичной |
|||||||||||||||||||
ляющая, так и указанные гармонические |
обмотки и площадь сечения магнитопро- |
|||||||||||||||||||
пары. Как видно из результатов числен- |
вода. Для подтверждения этого свойства |
|||||||||||||||||||
ного расчета (рис. 4, д, ж) и представ- |
проведем анализ магнитного состояния |
|||||||||||||||||||
ленных спектрограмм (рис. 4, е, з), |
сердечника с учетом гистерезиса. Запи- |
|||||||||||||||||||
выходное напряжение ПИМ-преобразо- |
шем |
исходные уравнения |
двухтактной |
|||||||||||||||||
вателя образуется основной гармоникой |
Т-схемы замещения рассматриваемого |
|||||||||||||||||||
со средней за полупериод сети частотой |
преобразователя [3]: |
|
|
|
|
|||||||||||||||
модуляции и ее кратными составляющи- |
|
|
|
dФ |
|
|
|
|
di |
|
|
|||||||||
ми как четного, так и нечетного порядка. |
e(t) −w1 dt |
|
= i1r1 + Ls1 |
dt1 , |
|
|
||||||||||||||
Видно так же, что наиболее низкочас- |
|
|
dФ |
|
|
|
|
|
|
|
|
|
di′ |
|||||||
|
|
= i2′ (r2′ +rн′) +(Ls′2 + |
Lн′ ) |
|||||||||||||||||
тотная составляющая данного спектра не |
w1 |
dt |
2 , (10) |
|||||||||||||||||
превышает |
10 % |
амплитуды |
сетевого |
|
|
+i′. |
|
|
|
|
|
|
|
dt |
||||||
= i |
|
|
|
|
|
|
|
|
||||||||||||
напряжения, |
поэтому высокочастотные |
i |
|
|
|
|
|
|
|
|
||||||||||
0 |
|
1 |
2 |
|
|
|
|
|
|
|
|
|
||||||||
изменения тока i(t) происходят практи- |
|
|
|
w |
|
|
|
= w s dB(H ) , |
|
|||||||||||
чески с неизменной амплитудой. |
|
|
|
|
dФ |
|
|
|||||||||||||
Oдной из возможностей применения |
|
|
|
1 |
|
dt |
|
|
1 |
dt |
|
(11) |
||||||||
данного способа модуляции, как отмеча- |
|
|
|
|
|
|
|
|
|
|
|
|||||||||
|
|
|
H = w1 i |
, |
|
|
|
|||||||||||||
лось, может |
стать |
промежуточное по- |
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
l |
0 |
|
|
|
|||||||||||
вышение частоты в первичных обмотках |
|
|
|
|
|
|
|
|
|
|
||||||||||
где e(t) – напряжение питания первич- |
||||||||||||||||||||
разделительно-согласующих трансфор- |
ных обмоток, e(t) = h(t) · sin(ω0t), здесь |
|||||||||||||||||||
маторов, питание которых становится |
h(t) – коммутационная функция, h(t) = ±1; |
|||||||||||||||||||
возможным без традиционных элемен- |
Ф – основной магнитный поток в сер- |
|||||||||||||||||||
тов звена постоянного тока. Будем счи- |
дечнике трансформатора; В – магнитная |
|||||||||||||||||||
тать, что работающий по данному прин- |
индукция; Н – напряженность магнитно- |
|||||||||||||||||||
ципу ПИМ-преобразователь |
выполнен |
го поля; |
Ls1, |
|
L′ |
, |
L′ – |
индуктивность |
||||||||||||
по трансформаторной двухтактной схеме |
|
|||||||||||||||||||
|
|
|
|
|
|
s2 |
|
|
н |
|
|
|
||||||||
рассеяния первичной обмотки и приве- |
||||||||||||||||||||
рис. 3, а. Известно, что пульсирующая |
||||||||||||||||||||
форма напряжения питания и прямо- |
денные значения индуктивности вторич- |
|||||||||||||||||||
угольность гистерезисной петли намаг- |
ной обмотки и нагрузки соответственно; |
|||||||||||||||||||
ничивания (ГПН) трансформаторов уве- |
r1, r′, |
|
r′ |
– активные сопротивления ука- |
||||||||||||||||
2 |
|
н |
|
|
|
|
|
|
|
|
|
|
||||||||
личивают |
вероятность выхода |
рабочей |
занных цепей; l – длина средней линии |
|||||||||||||||||
точки на участок насыщения. В двух- |
магнитопровода. |
|
|
|
|
|
|
|||||||||||||
тактных схемах к аналогичным резуль- |
Для получения кривой намагничи- |
|||||||||||||||||||
татам приводят |
различные |
проявления |
вания В(t) = f(Н(t)) воспользуемся воз- |
|||||||||||||||||
несимметрии. Покажем, что в режиме |
можностью аппроксимации восходящей |
|||||||||||||||||||
ПИМ-преобразования риск указанного |
(при коммуникационной функции h(t) = |
|||||||||||||||||||
аварийного режима сводится к нулю, так |
= –1) и нисходящей (при h(t) = +1) вет- |
|||||||||||||||||||
118 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вей ГПН одним уравнением, основу которого составляет функция гиперболического тангенса:
B(t) = B th |
H (t) ± HC |
= |
|
|
|
|||||||||
|
|
|
|
|||||||||||
|
|
|
|
S |
|
HC |
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|||
= BS |
|
|
H (t) +h(t) HC |
|
|
− |
||||||||
exp |
|
|
|
|||||||||||
|
|
|
|
|
|
|
||||||||
|
|
|
|
|
HC |
|
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
H (t) +h(t) HC |
|
|
|
||||||||
−exp− |
|
/ |
(12) |
|||||||||||
|
|
|
||||||||||||
|
|
|
|
|
|
HC |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|
||||||
|
|
|
H (t) +h(t) HC |
|
|
|
|
|
||||||
/ exp |
|
+ |
|
|||||||||||
|
|
|
|
|||||||||||
|
|
|
|
|
|
HC |
|
|
|
|
||||
|
|
|
|
|
|
|
|
|||||||
где |
f3 = (Ls1 + Ls′2 )αf1 + Ls1Ls′2 f2 ; |
α = |
||||||||||
= |
4w 2s |
|
a = |
r |
b = r′L |
−r L′ |
|
|||||
1 |
|
; |
1 |
; |
; |
|||||||
|
|
|
|
|||||||||
|
HCl |
|
|
|
|
Ls1 + Ls′2 |
2 |
s1 |
1 s2 |
|
||
|
|
|
|
|
|
|
|
|
||||
c = |
|
r2′ |
|
. |
|
|
|
|
|
|
||
L |
+ L′ |
|
|
|
|
|
|
|||||
|
|
s1 |
|
s2 |
|
|
|
|
|
|
||
|
|
После |
|
подстановки |
H(t) |
= |
w1i0(t)/l |
|||||
и дифференцирования (12) запишем необходимую для анализа зависимость ЭДС индукции в функции тока намагничивания
E = w |
dФ |
= |
4w |
2sf |
|
di |
|
|
|
1 |
1 |
0 |
, |
(14) |
|||
|
|
|
|
|||||
1 dt |
|
HClf2 |
|
dt |
|
|
||
|
|
+exp− |
|
H (t) +h(t) HC |
|
|
|
где f1(i0) |
= exp2((w1i0(t)/HCl) + |
h(t)); |
||||||||||||||||||||||||
|
|
|
|
|
, |
|
2 |
|
|
|
|
|||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
HC |
|
|
|
|
|
f2(i0) = (1 + f1) |
. |
|
|
|
||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полученные выражения позволяют |
|||||||
где HC – коэрцитивная сила, определяе- |
||||||||||||||||||||||||||||||||||
провести анализ в |
базисе |
переменных |
||||||||||||||||||||||||||||||||
мая согласно техническим условиям по |
«напряженность/индукция», принимая |
|||||||||||||||||||||||||||||||||
предельной ГПН при В = 0. Поставлен- |
одну из них (Н) за аргумент, а другую |
|||||||||||||||||||||||||||||||||
ная задача требует решения полной сис- |
(В) считая функцией. Полагая, что рабо- |
|||||||||||||||||||||||||||||||||
темы уравнений |
|
|
трансформатора [3], |
та преобразователя происходит в режиме |
||||||||||||||||||||||||||||||
представленной ниже в форме уравнения |
источника тока, зададим закон измене- |
|||||||||||||||||||||||||||||||||
Коши: |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
ния напряженности в функции тока на- |
|||||||||
di |
|
|
|
|
bL′ |
|
|
|
|
|
|
|
|
|
|
|
|
магничивания H(i0), после чего, подстав- |
||||||||||||||||
|
|
|
|
f |
2 |
|
|
|
|
|
|
|
ляя в выражение (12) BS = Bm, выясним |
|||||||||||||||||||||
|
1 |
= −i1 |
a + |
|
|
|
s2 |
|
− |
|
|
|
|
|
|
|
с помощью уравнений (11)–(14) характер |
|||||||||||||||||
|
|
|
|
f3 |
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||
dt |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
Ls1Ls′2r2′f2 |
|
|
|
|
|
|
|
|
|
|
|
|
изменения индукции В(Н) во времени. |
||||||||||||||||
− i2′c +i0 |
|
+ |
|
|
|
|
|
|
|
|
|
Результаты |
проведенных |
в |
пакете |
|||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||
|
|
|
|
|
|
|
|
f3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
MathСad |
расчетов |
представлены на |
|||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
2 |
|
|
|
|||||||||||
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
|
f |
рис. 5, а в виде частных циклов ГПН |
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
+ h(t)sin(ωt) |
|
|
|
|
|
|
− |
Ls′2 |
, |
|||||||||||||||||||||||||
Ls1 + |
|
|
|
|
|
|
и временного графика В(t). |
|
|
|||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Ls′2 |
|
f3 |
|
|
|
|
|
|||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Полученная картина дает представ- |
||||||
di′ |
|
|
|
|
|
|
bL |
|
f |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||
|
|
|
|
|
|
2 |
|
|
|
|
|
|
|
ление о меняющемся магнитном состоя- |
||||||||||||||||||||
|
2 |
= −i1 |
|
a |
+ |
|
|
|
s1 |
|
− |
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
f |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||
dt |
|
|
|
|
|
|
|
|
3 |
|
|
|
|
|
|
|
|
|
(13) |
нии трансформатора в процессе пуска |
||||||||||||||
|
|
|
|
|
2r′f |
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||
|
|
|
|
|
L |
2 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
с нулевых начальных условий. Видно, |
||||||||||||
− i2′c +i0 |
|
|
s1 |
|
2 |
|
|
+ |
|
|
|
|
|
|
|
|
|
|
|
|
что изменения тока намагничивания i0(t) |
|||||||||||||
|
|
|
|
f3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
сопровождаются так называемой |
акко- |
|||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
1 |
|
|
|
L′ |
L |
f |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
модацией петли гистерезиса, однако это |
|||||||||||||||||||
+ h(t)sin(ωt) |
|
|
|
|
|
|
|
|
|
− |
s |
2 |
s1 |
|
|
, |
||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
Ls1 + |
Ls′2 |
|
f3 |
|
|
|
не приводит к выходу рабочей точки за |
|||||||||||||||||
|
|
= i bf2 −i |
Ls1r2′f2 + |
|
|
|
|
|
|
|
пределы линейного участка характери- |
|||||||||||||||||||||||
di0 |
|
|
|
|
|
|
|
|||||||||||||||||||||||||||
|
|
1 |
|
|
|
|
|
0 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
стики. В результате на рис. 5, г отсутст- |
||||||||
dt |
|
f |
3 |
|
|
|
|
|
|
f |
3 |
|
|
|
|
|
|
|
|
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
вуют какие-либо признаки насыщения |
|||||||||
|
|
|
|
|
|
|
|
|
Ls′2 f2 |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||
+ h(t)sin(ωt) |
, |
|
|
|
|
|
|
|
|
|
|
в виде интервалов постоянства индукции |
||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
||||||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
f3 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||||
В(t) = const и соответствующего возрастания тока намагничивания i0(t). Анализ
119

б |
в |
|
г
а д
Рис. 5. К анализу магнитного состояния трансформатора в схеме ПИМ-преобразователя: а – кривая тока намагничивания i0(t) в режиме пуска на холостом ходу; б – семейство частных циклов кривой намагничивания В = F(H); в – мгновенные значения индукции B(t) в режиме пуска; г – кривые токов первичной (вторичной) обмоток i1(2)(t), а также тока намагничивания i0(t) в масштабе увеличения 500:1 в режиме пуска при относительной несимметрии вольт-секундных площадей 1,5 %; д – то же в режиме относительной несимметрии 15 %. Параметры магнитопровода: HC = 40 A/м; w1 = 100; s = 4 · 10–4 м2;
l |
= 0,125 м; Ls1 = Ls′2 |
= 0,2 · 10–6 Гн; r1 = r2′ = 7 · 10–3 Ом; rн = 1 Ом; Lн = 0 |
||
токов i1(i2), i0 показывает способность |
при частоте модуляции 600 Гц составило |
|||
ПИМ-преобразователя сохранять сим- |
не менее 1–1,5 мкс. На рис. 5, д показа- |
|||
метричный |
режим перемагничивания |
но, что превышение указанного порога |
||
в условиях различных дестабилизирую- |
способно привести к выходу рабочей |
|||
щих факторов (изменения амплитуды |
точки на участок насыщения ГПН и, со- |
|||
сетевого напряжения, несимметрии па- |
ответственно, к аварийному возрастанию |
|||
раметров двухтактной схемы замещения |
токов i0(t) и i1(t) |
|||
и др.). Влияние большинства из них уда- |
ПИМ-преобразователь как элемент |
|||
ется представить в виде эквивалентной |
||||
системы автоматического управления |
||||
несимметрии вольт-секундных площа- |
||||
дей напряжения питания трансформато- |
Интересно оценить влияние моду- |
|||
ра, которая в условиях ПИМ-пре- |
ляционных процессов на динамические |
|||
образования стремится быть на нулевом |
свойства ПИМ-преобразователя. Будем |
|||
уровне. Получено подтверждение, что |
считать, что данный объект подвержен |
|||
известное явление «накапливания ин- |
воздействию двух видов модуляции вы- |
|||
дукции» не проявляет себя до тех пор, |
ходного напряжения: амплитудной со |
|||
пока указанная несимметрия не превы- |
стороны питающей сети и широтно- |
|||
сит определенного порогового уровня. |
импульсной со стороны управляющего |
|||
Искусственно созданный, этот уровень |
входа. Взаимная компенсации влияния |
|||
для указанных параметров магнитопро- |
обоих видов модуляции на величину и |
|||
вода оказался равным порядка 1–1,5 %. |
форму тока индуктивной нагрузки по- |
|||
Соответствующее пороговое |
значение |
зволяет сделать вывод об их эквивалент- |
||
несимметрии |
управляющих |
импульсов |
ности, а значит, о возможной формаль- |
|
120 |
|
|
|
|