

1491
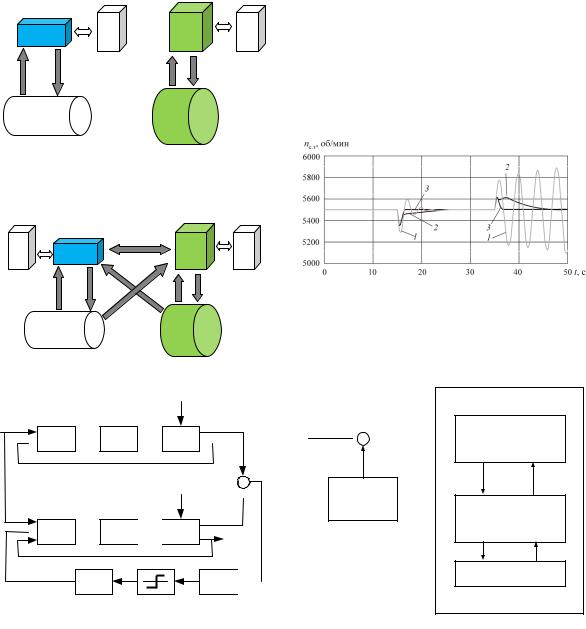
.pdfРис. 7. Модуль настройки регуляторов программного комплекса «ЭлектроДин»: 1 – главное меню приложения «Визуализатор моделирования»; 2 – панель моделирования; 3 – окно отображения схемы проекта; 4 – главное меню модуля настройки САУ ГТУ; 5 – окно отображения настроенных параметров САУ; 6 – окно отображения результатов до настройки; 7 – окно отображения результатов после настройки
Здесь |
можно выделить |
следующие |
5. Создание программного комплек- |
|||
основные задачи исследования: |
са для испытания и настройки адаптив- |
|||||
1. Исследование возможностей и ог- |
ных алгоритмов управления. |
|
||||
раничений |
традиционных |
принципов |
6. Разработка комплекса методик |
|||
раздельного управления ГТУ и синхрон- |
адаптивного управления для построения |
|||||
ных генераторов (СГ). |
|
перспективных САУ для «умной» энер- |
||||
2. Исследование возможностей тра- |
гетики. |
|
|
|||
диционных принципов управления с эле- |
Использование перекрестных связей |
|||||
ментами адаптации во взаимосвязанных |
может |
предоставлять дополнительные |
||||
САУ ГТУ и САУ СГ при учете динами- |
возможности для улучшения характери- |
|||||
ки энергоустановки в различных режи- |
стик САУ, здесь необходимо исследовать |
|||||
мах работы и топологиях электросети. |
возможности и проблемы, сопутствую- |
|||||
3. Исследование возможностей тех- |
щие этой схеме управления (рис. 8, 9) |
|||||
нологии soft-computing: нейронные сети, |
[11]. |
|
|
|
||
нечеткая логика, генетические алгорит- |
Опыт использования показал, что |
|||||
мы с элементами адаптации при исполь- |
даже |
прямое |
применение |
известных |
||
зовании в САУ при учете динамики |
подходов к построению адаптивных сис- |
|||||
электросистем в различных режимах ра- |
тем позволяет достичь очевидных поло- |
|||||
боты и топологиях. |
|
жительных результатов. |
|
|||
4. Разработка алгоритмов идентифи- |
Например, |
применение |
адаптивной |
|||
кации и оптимизации для адаптивного |
системы с эталонной моделью и сигналь- |
|||||
управления электростанциями с учетом |
ной настройкой для управления ГТУ по |
|||||
динамики активно-адаптивной («ум- |
схеме на рис. 10 позволило улучшить ди- |
|||||
ной») сети. |
|
|
намику переходных процессов (рис. 11). |
|||
|
|
|
|
|
|
21 |
УУ ГТУ |
БА |
УУ |
БА |
|
СГ |
|
|
|
|
|


 ГТУ
ГТУ







 СГ
СГ
Рис. 8. Раздельное управление: ГТУ – газотурбинная установка; СГ – синхронный генератор; УУ – устройство управления; БА – блок адаптации
моделью. В результате становится возможным в темпе процесса управления производить идентификацию объекта управления и корректировать управляющие устройства, реализуя тем самым принцип адаптивного управления.
БА |
УУ |
УУ |
БА |
|
СГ |
|
|
|
|
|


 ГТУ
ГТУ




 СГ
СГ
Рис. 9. Совместное управление
nс.т. зад
 Рс.т
Рс.т  Рд.г
Рд.г
 Рс.т
Рс.т  Рд.г
Рд.г
h
NG
 МГТУ
МГТУ  nс.т.м
nс.т.м
(–) + e
NG X 

 ГТУ
ГТУ
nс.т
BTP 
Рис. 10. Структурная схема адаптивной системы с эталонной моделью и сигнальной настройкой: Рс.т – регулятор частоты вращения ГТУ; Рд.г – регулятор дозатора газа ГТУ; NG – нагрузка ГТУ (синхронный генератор); е – вектор ошибки; nс.т – частота вращения свободной турбины; h, B, P – матрицы и векторы из алгоритма управления [12]
Адаптивный регулятор несложно встроить в штатную систему управления ГТУ (рис. 12), при этом возможно постепенное увеличение сигнала контура адаптации с тем, чтобы при проведении испытаний на натурном стенде максимально учесть требования безопасности.
Аналогичные результаты получены для систем управления с настраиваемой
22
Рис. 11. Частота вращения свободной турбины ГТУ: 1 – система со штатным регулятором частоты вращения; 2 – система с сигнальной настройкой; 3 – эталонная модель
nсуст.т
 +
+ 
z(t)
Модуль x сигнальной 
настройки
nс.тnтк
x3x4
Рис. 12. Взаимодействие модуля сигнальной настройки и штатного регулятора ГТУ
На основании проведенного исследования можно сделать следующие выводы:
Полученные результаты позволяют существенно улучшить качество переходных процессов по частоте сети (ГТУ непосредственно влияет на частоту питающей сети): сократить провалы и уменьшить их длительность при значительных колебаниях электрической нагрузки электростанций. В свою очередь, программные комплексы служат важным инструментом создания безмо-
торных испытательных стендов для создания новых САУ ГТУ электростанций на авиадвигателестроительных предприятиях. Подобным же образом планируется получить эффект и при улучшении качества электроэнергии по напряжению.
Представленные в статье результаты получены при выполнении государственного задания Минобрнауки РФ № 13.832.2014/K «Разработка методологических основ адаптивного управления автономными и неавтономными газотурбинными электростанциями мощностью до 25 МВт».
Список литературы
1.Официальный сайт ОДК-Пермские моторы. – URL: http://www.pmz.ru/ products/eps.
2.Авиационные ГТД в наземных установках / С.П. Изотов, В.В. Шашкин, В.М. Капралов [и др.]. – Л.: Машино-
строение, 1984. – 228 с.
3.Шигапов А.А., Петроченков А.Б., Кавалеров Б.В. Структурная схема математической модели системы электроснабжения для испытания алгоритмов управления // Электротехника. – 2010. –
№6. – С. 55–61.
4.Морозовский В.Т. Многосвязные системы автоматического регулирова-
ния. – М.: Энергия, 1970. – 288 с.
5.Мееров М.В., Литвак Б.Л. Оптимизация систем многосвязного управле-
ния. – М.: Наука. 1972. – 344 с.
6.Кавалеров Б.В. Математическое моделирование в задачах автоматизации испытаний систем управления энергетических газотурбинных установок // Известия Юго-Зап. гос. ун-та. – 2011. – № 1. –
С. 74–83.
7.Веретенников Л.П. Исследование процессов в судовых электроэнергетических системах. Теория и методы. – Л.: Судостроение, 1975. – 376 с.
8.Кавалеров Б.В., Петроченков А.Б. Моделирование электрической нагрузки для настройки систем управления конвертированными газотурбинными установками // Электротехника. – 2011. –
№11. – С. 11–16.
9.Stefopoulos G. A genetic algorithm solution to the governor-turbine dynamic model identification in multi-machine power systems // Proceedings of the IEEE Conference on Decision and Control. – 2005. – Bd. 2. – S. 1288–1294.
10.Методика создания программных комплексов для математического моделирования электроэнергетических систем / Б.В. Кавалеров, А.Б. Петроченков, К.А. Один, В.А. Тарасов // Электро-
техника. – 2015. – № 6. – С. 32–39.
11.О задачах исследования адаптивного управления электростанциями на базе конвертированных авиационных ГТУ / Б.В. Кавалеров, И.В. Бахирев, Г.А. Килин, Е.А. Маталасова // Вестник Пермского национального исследовательского политехнического университета. Электротехника, информационные технологии, системы управления. – 2014. –
№11. – С. 65–77.
12.Борцов Ю.А., Поляхов Н.Д., Путов В.В. Электромеханические системы с адаптивным и модальным управлением. – Л.: Энергоатомиздат, 1984. – 216 с.
23
УДК 004.415.2.031.43
МОДЕЛИ НАГРУЗОК ДЛЯ СИМУЛЯТОРОВ РЕАЛЬНОГО ВРЕМЕНИ ЭЛЕКТРОПРИВОДОВ
А.М. Зюзев, М.В. Бубнов, М.В. Мудров, К.Е. Нестеров
Уральский федеральный университет им. первого Президента России Б.Н. Ельцина, Екатеринбург
Описан общий подход к построению симуляторов и структура типового симулятора электропривода. В качестве платформы симуляторов предложено использовать программируемые логические интегральные схемы (ПЛИС). В состав симулятора входят модели механической части, силового преобразовательного полупроводникового устройства и электродвигателя, работающие в реальном масштабе времени. Рассмотрены примеры реализации механической части в симуляторе для механизмов станкакачалки и ходовой части маневрового локомотива. Был использован программно-аппаратный комплекс компании National Instruments, включающий в себя плату с ПЛИС и программное обеспечение LabVIEW для ее программирования. Данный подход позволяет в некоторых случаях отказаться от дорогостоящих испытаний и экспериментов на реальном оборудовании, поскольку симулятор способен принимать и обрабатывать сигналы испытываемого устройства, возвращая ему сигналы, подобные сигналам реального оборудования.
Ключевые слова: симулятор, ПЛИС, станок-качалка, маневровый локомотив, математическая модель.
LOAD MODELS FOR REAL-TIME SIMULATORS OF ELECTRIC DRIVES
A.M. Ziuzev, M.V. Bubnov, M.V. Mudrov, K.E. Nesterov
Ural Federal University named after the first President of Russia B.N. Yeltsin, Ekaterinburg
A common approach on simulators building and structure of typical electric drive simulator are described. A field programmable gate array (FPGA) module is proposed to use as simulator platform. The simulator is composed of mechanical part, power semiconductor converter and electric motor real-time models. Examples of mechanical part implementation in simulator are considered for pumpjack and shunting locomotive running gear machines. The hardware-software complex of National Instruments corporation was used which includes FPGA board and LabVIEW programming tool. This approach in some cases avoids the expensive tests and experiments on the real equipment, since the simulator capable of receiving and processing signals of testing device and returning the same signals, as ones obtained from the real equipment.
Keywords: simulator, FPGA, pumpjack, shunting locomotive, mathematical model.
Введение |
увеличить продолжительность и трудоем- |
Создание нового оборудования все- |
кость работы. Кроме того, необходимо |
гда включает в себя этап испытаний, но |
принимать во внимание жесткие условия |
проведение испытаний на реальном обо- |
по срокам проведения работ на объекте, |
рудовании сопряжено с рядом трудно- |
связанные с режимом работы предпри- |
стей. Во-первых, требуется поиск подхо- |
ятия и возможным прерыванием произ- |
дящего оборудования и налаживание кон- |
водственного процесса, а также необхо- |
тактов с его владельцем. Во-вторых, такая |
димость привлечения квалифицированных |
работа связана с определенными затрата- |
специалистов из числа обслуживающего |
ми и риском повреждения оборудования. |
персонала. |
В-третьих, оборудование может быть |
С теми же трудностями сталкиваются |
расположено удаленно и эксплуатиро- |
ученые-исследователи, когда выходят на |
ваться в сложных для пребывания чело- |
этап проведения эксперимента. Как пра- |
века условиях, что может значительно |
вило, материального обеспечения не хва- |
24

тает |
для проведения полномасштабных |
ван на примере механизмов станка- |
|||||||
и регулярных экспериментов на дорого- |
качалки и ходовой части маневрового ло- |
||||||||
стоящем промышленном объекте. Для |
комотива. |
|
|||||||
решения данной проблемы предлагается |
Примеры математических моделей |
||||||||
использовать симуляторы оборудования. |
|||||||||
Симулятор представляет собой про- |
для симулятора |
|
|||||||
|
|
||||||||
граммно-аппаратный комплекс, в котором |
Математическая модель станка |
||||||||
реализуется |
модель оборудования, рас- |
||||||||
качалки |
|
||||||||
считываемая в реальном масштабе време- |
|
||||||||
Кинематическая модель |
станка- |
||||||||
ни. Это позволяет воздействовать на |
|||||||||
качалки отражает один из двух типов |
|||||||||
симулятор |
реальными |
управляющими |
геометрии кривошипно-коромыслового |
||||||
сигналами, поступающими от объекта ис- |
механизма, встречающихся на практике: |
||||||||
пытаний, и получать от него сигналы, |
двуплечевого (рис. 1, а) или одноплечево- |
||||||||
аналогичные сигналам реальных датчи- |
го (рис. 1, б) с кривошипным (роторным) |
||||||||
ков. В качестве аппаратной платформы |
типом уравновешивания. |
|
|||||||
рекомендуется |
использовать |
программи- |
|
|
|||||
руемые логические интегральные схемы |
|
|
|||||||
(ПЛИС), поскольку они полностью удов- |
|
|
|||||||
летворяют |
заявленным |
требованиям. |
|
|
|||||
В рассматриваемом случае для |
построе- |
|
|
||||||
ния |
симулятора задействованы |
средства |
|
|
|||||
программно-аппаратного комплекса ком- |
|
|
|||||||
пании National |
Instruments, включающие |
|
|
||||||
плату с ПЛИС и программное обеспече- |
|
|
|||||||
ние LabVIEW для ее программирования. |
|
|
|||||||
Одним из преимуществ рассматриваемого |
а |
|
|||||||
подхода является то, что на одной плате |
|
||||||||
|
|
||||||||
может быть размещено несколько моде- |
|
|
|||||||
лей в пределах доступного количества |
|
|
|||||||
ячеек ПЛИС. |
|
|
|
|
|
|
|||
Разработка |
симулятора |
принципи- |
|
|
|||||
ально возможна для любого объекта, ко- |
|
|
|||||||
торому соответствует известное матема- |
|
|
|||||||
тическое описание. Реализация электро- |
|
|
|||||||
механической |
и преобразующей частей |
|
|
||||||
электропривода представлена в предыду- |
|
|
|||||||
щих работах [1, 2]. Данная статья посвя- |
|
|
|||||||
щена построению симуляторов механиче- |
|
|
|||||||
ской |
части |
электропривода. |
К |
типовым |
б |
|
|||
звеньям механической части электропри- |
|
||||||||
Рис. 1. Двуплечевой (a) и одноплечевой (б) типы |
|||||||||
вода можно отнести различные переда- |
геометрии станка-качалки |
|
|||||||
точные механизмы, системы упруго взаи- |
В основе математической |
модели |
|||||||
модействующих тел, полиспастную сис- |
|||||||||
тему |
и |
различные |
исполнительные |
станка-качалки лежат уравнения движе- |
|||||
механизмы. Подход к построению симу- |
ния звеньев, переменной в которых явля- |
||||||||
ляторов нагрузок будет продемонстриро- |
ется угол поворота кривошипа [1]. Систе- |
||||||||
25

ма координат включает две оси: верти- |
i=g |
|
j= f |
|
|
|
|
|
|
|
|||||||||||||
кальная проходит через центр балансира, |
JΣ = ∑ Jiui2 + ∑ mjρ2j |
, |
|
|
|
||||||||||||||||||
а горизонтальная – через ось вращения |
i=1 |
|
j=1 |
|
|
|
|
|
|
||||||||||||||
где g и f – число элементов, совершаю- |
|||||||||||||||||||||||
кривошипа |
[2]. |
Рассмотрим |
уравнения |
||||||||||||||||||||
координат узловых точек для двуплечево- |
щих соответственно вращательное |
и по- |
|||||||||||||||||||||
го станка-качалки: |
|
|
|
|
|
|
|
|
ступательное движения; Ji – момент |
||||||||||||||
xB = m + R cos α, |
yB = R sin α, |
|
инерции i-го элемента; mj – масса j-го эле- |
||||||||||||||||||||
|
мента. |
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
||
y = −β± |
β2 −4αγ , |
x = |
l 2 |
−( y −n)2 , |
Результирующим |
является |
диффе- |
||||||||||||||||
C |
2α |
|
|
|
C |
1 |
|
C |
|
ренциальное уравнение движения криво- |
|||||||||||||
|
|
|
|
|
|
|
|
|
|
шипа |
|
|
|
|
|
|
|
|
|
|
|||
α = 4((n − yB )2 + xB2 ), |
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
|
|
|
dω |
|
2 |
|
dJΣ |
(α) |
|
||||||||||||||
β = 4(d (ny − yB )−2xB2 ny ), |
|
Mcr −MΣ (α) = JΣ |
(α) |
+ |
ω |
|
, |
||||||||||||||||
|
dt |
|
2 |
|
dα |
||||||||||||||||||
|
|
|
|
|
|
|
|||||||||||||||||
γ = d 2 −(2xBl1 )2 +(2xBny )2 , |
|
где Mcr – момент, приложенный к кри- |
|||||||||||||||||||||
|
вошипу со стороны |
двигателя; |
M∑(α), |
||||||||||||||||||||
|
|
|
|
|
|
|
|
|
|
l2 |
|
J∑(α), dJ∑(α)/dα – |
соответственно приве- |
||||||||||
2 |
2 |
2 |
|
2 |
|
2 |
|
|
|
|
денные момент сопротивления, момент |
||||||||||||
d = xB −k |
+l1 |
−n |
|
+ yB , |
xE = −xC l1 |
, |
|||||||||||||||||
|
инерции и производная момента инерции |
||||||||||||||||||||||
|
yE = n −(yC −ny ) |
l2 |
, |
|
по углу поворота кривошипа, зависящие |
||||||||||||||||||
|
|
от угла поворота. Для нахождения скоро- |
|||||||||||||||||||||
|
|
|
|||||||||||||||||||||
|
|
|
|
|
|
|
|
l1 |
|
|
|||||||||||||
|
|
|
|
|
|
|
|
|
|
сти вращения кривошипа ω данное урав- |
|||||||||||||
где x и y – координаты узловых точек ме- |
|||||||||||||||||||||||
нение решается методом численного ин- |
|||||||||||||||||||||||
ханизма; α – угол поворота кривошипа; n, |
тегрирования. Для интегрирования урав- |
||||||||||||||||||||||
m, r, k, l1, l2 – длины отрезков OD, OA, AB, |
нений выбран метод Эйлера. Угловая |
||||||||||||||||||||||
BC, CD, DE соответственно. Данные урав- |
скорость двигателя находится с учетом |
||||||||||||||||||||||
нения позволяют рассчитать приведенные |
передаточного отношение редуктора (пе- |
||||||||||||||||||||||
моменты сил, прикладываемых к конст- |
редачи). |
|
|
|
|
|
|
|
|
|
|
||||||||||||
рукции через передаточное |
отношение |
Приведенный выше алгоритм перво- |
|||||||||||||||||||||
звена относительно оси вращения криво- |
начально был написан на языке Pascal для |
||||||||||||||||||||||
шипа, а также координаты точек движу- |
последующей отладки. Затем он был пе- |
||||||||||||||||||||||
щихся центров масс звеньев механизма. |
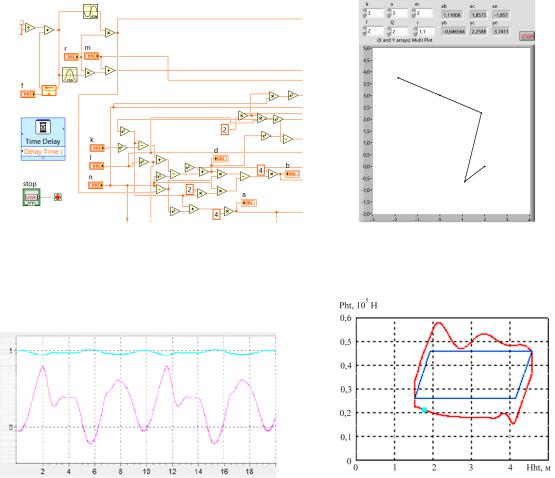
ренесен в среду объектно-визуального |
||||||||||||||||||||||
Результирующий |
|
момент нагрузки |
программирования LabVIEW (рис. 2, а). |
||||||||||||||||||||
определяется по формуле |
|
|
|
|
|
Рис. 2, б показывает лицевую панель по- |
|||||||||||||||||
|
|
i=q |
|
|
j=p |
|
|
|
|
|
лученного виртуального устройства, ко- |
||||||||||||
MΣ = ∑Miui |
+ ∑ Fjρj , |
|
торая позволяет задавать параметры стан- |
||||||||||||||||||||
|
|
i=1 |
|
|
j=1 |
|
|
|
|
|
ка-качалки и отображает положение |
||||||||||||
|
|
|
|
|
|
|
|
|
|
|
|
||||||||||||
где q и p – число моментов и сил, прило- |
звеньев механизма. |
|
|
|
|
|
|
|
|
|
|
||||||||||||
женных к механизму; u – передаточное |
Результаты расчета |
математической |
|||||||||||||||||||||
отношение i-го элемента относительно |
модели включают |
диаграммы |
момента |
||||||||||||||||||||
оси вращения кривошипа; ρ – радиус при- |
и скорости двигателя (рис. 3, а) и динамо- |
||||||||||||||||||||||
ведения j-го элемента относительно оси |
грамму насосной установки (рис. 3, б). |
||||||||||||||||||||||
вращения кривошипа. |
|
|
|
|
|
|
Динамограмма отражает изменение на- |
||||||||||||||||
Момент |
инерции |
также |
приводится |
грузки в точке подвеса устьевого штока |
|||||||||||||||||||
к оси вращения кривошипа по следующей |
в зависимости от |
перемещения |
штока |
||||||||||||||||||||
формуле: |
|
|
|
|
|
|
|
|
|
|
|
в процессе работы станка-качалки. |
|
|
|||||||||
26
а |
б |
Рис. 2. Фрагменты модели станка-качалки в LabVIEW
|
|
|
|
а |
|
|
|
|
б |
|
Рис. 3. Диаграмма скорости и момента двигателя (а) и динамограмма насоса (б) |
||||||||||
Математическая модель локомотива |
реи), двигателя постоянного тока с не- |
|||||||||
Пример |
кода |
модели электрообору- |
зависимым возбуждением, преобразова- |
|||||||
дования локомотива, созданного на осно- |
телей DC/DC с широтно-импульсной мо- |
|||||||||
дуляцией в цепи якоря и в цепи возбуж- |
||||||||||
ве системы |
уравнений, |
представленных |
дения и модель нагрузки, определяемой |
|||||||
ниже, показан на рис. 4. |
|
|
|
|
||||||
|
|
|
|
условиями движения локомотива. |
||||||
|
|
|
|
|
|
dia , |
||||
e = e |
+r |
i |
+ r |
T |
Как показано на рис. 5, локомотив |
|||||
c |
m |
a |
a |
a |
a |
|
dt |
|
состоит из двух тележек, на каждой из ко- |
|
|
|
m = ia ϕ, |
|
|
|
|
торых находятся три моста. Каждый мост |
|||
|
|
|
|
|
|
приводится в движение одним двигате- |
||||
|
|
|
|
|
|
|
|
|
||
|
|
em = ω ϕ, |
|
|
|
|
лем. На рис. 5 видно, что двигатели со- |
|||
|
|
|
|
dω |
|
|
|
единены так, что образуют три комплекта |
||
|
|
|
|
|
|
|
электроприводов. Каждый из трех ком- |
|||
|
m −mc =Tj dt . |
|||||||||
|
плектов объединяет два электродвигате- |
|||||||||
На основе моделей, перечисленных |
||||||||||
ля, якорные цепи которых и обмотки воз- |
||||||||||
выше, разработана модель электроприво- |
буждения соединены в последовательные |
|||||||||
да локомотива, включающая модель ис- |
группы с раздельным питанием от от- |
|||||||||
точника питания (аккумуляторной бата- |
дельных преобразователей DC/DC. |
|||||||||
|
|
|
|
|
|
|
|
|
27 |
|
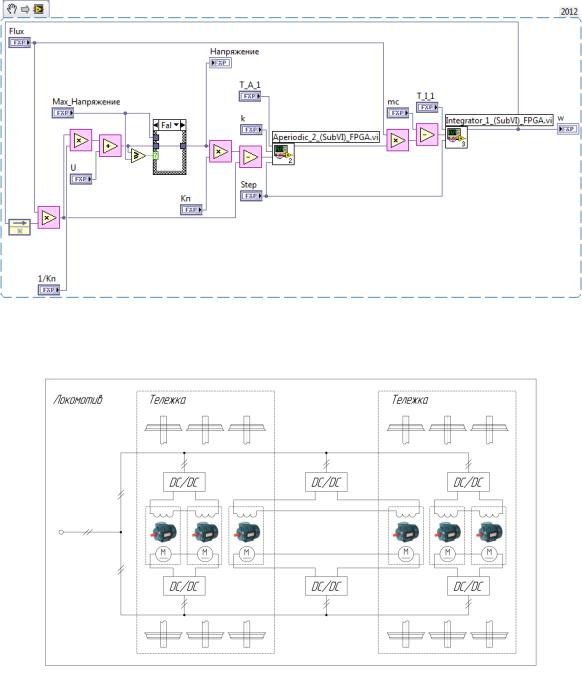
Рис. 4. Пример программного кода модели двигателя постоянного тока с независимым возбуждением в среде LabVIEW FPGA
Рис. 5. Компоновка электрооборудования локомотива
Особенностью рассматриваемой системы электропривода является то, что имеющиеся на локомотиве двигатели включены в схему независимого возбуждения, но управляются как двигатели с последовательным возбуждением. Для этого задание тока на вход регулятора тока якорной цепи подается и на вход регулятора тока цепи возбуждения.
На рис. 6 показаны реакция тока якоря и тока возбуждения на ступенча-
тое входное воздействие в контурах тока якоря и тока возбуждения соответственно при стандартной настройке контуров на модульный оптимум, которые полностью совпадают.
Для подтверждения возможности построения симулятора электропривода маневрового локомотива создана математическая модель электромеханической части локомотива в среде LabVIEW FPGA. На вход системы управления по-
28

Рис. 6. Реакция тока якоря и тока возбуждения на ступенчатое входное воздействие
Рис. 7. Расчетные осциллограммы скоростей двигателей при отработке многоступенчатого линейного задания
дано многоступенчатое задание на скорость ω*, формируемое задатчиком интенсивности. На рис. 7 представлены осциллограммы, демонстрирующие реакцию по скорости ω1 и ω2 двух двигателей, работающих без нагрузки.
Уравнения математической модели электромеханической части маневрового локомотива решаются на ПЛИС в реальном времени, что дает возможность исследовать процессы, протекающие в электроприводе, и выполнять наладку системы управления в условиях лаборатории.
Заключение
К настоящему моменту разработаны математические модели наиболее используемых в электроприводе типовых
механизмов. Кроме того, отлажена методика перевода математических уравнений в ПЛИС-код. Таким образом, в нашем распоряжении есть все средства для создания симулятора любого механизма, который может найти применение как в исследовательской научной работе, так и при испытаниях промышленного оборудования на предприятиях-произ- водителях. Основными преимуществами такого подхода являются возможность получения переменных, характеризующих состояние механизма в режиме реального времени, причем не только тех, что могут быть получены традиционными датчиками, но и тех, которые раньше были недоступны для прямого контроля. При условии построения адекватного
29
симулятора объекта это открывает широкие возможности для исследований и управления.
Список литературы
1. The dynamic simulation model and the comprehensive simulation algorithm of the beam pumping system / S. Dong, Y. Cui, M. Xing, S. Liao, L. Du // International Conference on Mechanical and Automation Engineering (MAEE). – 2013. –
P.118–122.
2.Building the dynamometer card of sucker rod pump using power consumption
of the eclectic |
motor of pumping unit / |
G. Guluyev, |
A. Pashayev, F. Pashayev, |
A. Rzayev, E. Sabziev // Problems of Cybernetics and Informatics (PCI): IV International Conference. – 2012. – P. 1–3.
3.The state of and prospects for using hardware-software simulators of electrotechnical complexes / A.M. Kostygov, A.M. Zyuzev, E.M. Solodkii, A.V. Kukharchuk, M.V. Mudrov, K.E. Nesterov // Russian Electrical Engineering. – 2015. – Vol. 86, № 6. – P. 309–313.
4.Ziuzev A.M., Nesterov K.E., Mudrov M.V. The software-hardware simulator of the electric drive // 16th European Conference on Power Electronics and Applications (EPE'14-ECCE Europe). – 2014. – P. 1–7.
30