

1491
.pdf06:15:28.5 |
06:20:16.4 |
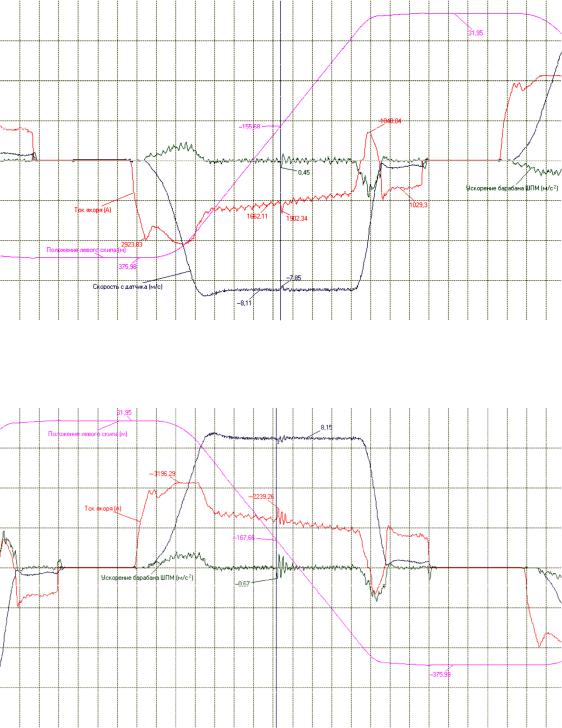
Рис. 2. Графики работы подъема с признаками неисправности |
|
Развитие ситуации подробно описа- |
тормоза (рис. 5, 6). Подъем левого скипа |
но ниже. |
начался без отклонений от работы. Ски- |
6:15:37–6:16:54. Цикл подъема гру- |
пы были разогнаны и двигались с посто- |
женого левого скипа (рис. 3). При подъ- |
янной скоростью 8,1 м/с. При прохожде- |
еме скипа на участке равномерного дви- |
нии левым скипом координаты «–167 м» |
жения наблюдается нехарактерный ска- |
ток якоря подъемного двигателя начал |
чок величины тока якоря подъемного |
резко возрастать. На графике тока якоря |
двигателя. На графике скорости также |
выделяются два пика с максимумом |
замечена просадка. Координата возму- |
3100 А. График скорости движения ски- |
щения по левому сосуду – «–155 м» от |
пов также изменился, повторив характер |
нулевой отметки. |
изменения тока. Действие возмущения |
6:17:12–6:18:28. Цикл подъема гру- |
и затухание импульсов, на графиках тока |
женого правого скипа (рис. 4). На участ- |
и скорости продолжаются 7 с, в этот пе- |
ке равномерного движения на графиках |
риод скипы прошли в стволе 56 м. |
тока якоря и скорости наблюдается воз- |
Далее скипы двигаются со скоростью |
мущающее воздействие. Координата на- |
8,1 м/с, график тока якоря имеет харак- |
чала возмущения по левому скипу – |
терную для нормальной работы величи- |
«–167 м». Амплитуда возмущения тока |
ну. Подъем левого скипа продолжался |
выражена больше, чем в предыдущем |
до координаты «–14 м», где началось |
цикле, и составляет 20 % от первоначаль- |
резкое увеличение тока якоря подъемно- |
ного уровня сигнала. Процесс затухания |
го двигателя, вызвавшее срабатывание |
импульса продолжался 2,5 с, в этот пери- |
предохранительного тормоза. В момент |
од скипы прошли в стволе 20 м. Цикл |
включения предохранительного тормоза |
подъема скипа завершен штатно. |
скорость движения скипов составляла |
6:18:50–6:19:50. Подъем левого ски- |
7,19 м/с. Левый скип имел координату |
па, срабатывание предохранительного |
«–10,77 м». Величина ускорения бараба- |
|
11 |
на подъемной машины достигла значе- |
машины. Из этих графиков видно, что |
||
ния 12,3 м/с2. Остановка подъемной ма- |
удары скипа через канат передавались |
||
шины продолжалась 2 с. Левый скип ос- |
подъемной машине. Отсюда следует, что |
||
тановился на уровне «–7,40 м». |
контроль плавности движения скипов |
||
|
На рис. 1 и рис. 3–6 приведены рас- |
возможен на основе обработки инфор- |
|
четные графики ускорений подъемной |
мации о параметрах работы подъема. |
||
|
|
|
|
|
|
|
|
06:15:04.4 |
06:17:28.3 |
|
Рис. 3. Подъем груженого скипа с первым признаком неисправности |
|
|
|
|
06:16:38.0 06:19:01.9
Рис. 4. Спуск порожнего скипа с признаками неисправности (подъем правого скипа)
12

06:18:16.1 |
06:20:40.0 |
|
Рис. 5. Цикл подъема при срабатывании предохранительного тормоза (ТП) |
|
|
|
|
06:19:45.8 |
|
|
06:19:51.4 |
||
Рис. 6. Графики параметров подъемной машины при срабатывании предохранительного тормоза |
|||||
Для |
осуществления непрерывного |
– датчиков тока в силовых цепях |
|||
контроля |
плавности движения скипов |
привода подъемной машины; |
|
||
необходимо создать аппаратно-програм- |
– |
устройства сбора и |
первичной |
||
мный комплекс. Он должен включать в |
обработки данных (на основе програм- |
||||
себя аппаратную часть, состоящую: |
мируемого |
логического |
контроллера |
||
– из первичных датчиков контроля |
(ПЛК) |
или |
персонального |
компьютера |
|
положения скипов в шахтном стволе; |
(ПК)); |
|
|
|
|
|
|
|
|
|
13 |
– устройства математической обра- |
включение исполнительных реле на за- |
|||||||
ботки, хранения и представления данных |
прет пуска машины или включение пре- |
|||||||
на базе ПК. |
|
|
|
дохранительного тормоза. |
|
|
||
Программная часть комплекса состо- |
На основании проведенного исследо- |
|||||||
ит из программы ПЛК и программы ПК. |
вания можно сделать следующие выводы: |
|||||||
Назначение первой – собирать мгновен- |
1. Разрабатываемая система контроля |
|||||||
ные данные с датчиков и передавать их в |
плавности движения скипов позволит вы- |
|||||||
обработанном виде на ПК. Программа ПК |
явить возникающие отклонения в работе |
|||||||
выполняет |
математическую |
обработку |
подъема, информировать об этом обслу- |
|||||
массивов мгновенных значений, их ана- |
живающий персонал и остановить работу |
|||||||
лиз и сравнение; производит архивацию и |
подъема при больших значениях динами- |
|||||||
вывод результатов на экран и в сеть пред- |
ческих проявлений. |
|
|
|||||
приятия; выдает предупреждения и ко- |
2. В основе системы лежит матема- |
|||||||
манды на исполнительные реле комплек- |
тическая модель шахтного подъема, кото- |
|||||||
са; производит самодиагностику исправ- |
рая позволит на основании численных |
|||||||
ности измерительных каналов комплекса. |
экспериментов |
разработать |
требования |
|||||
Алгоритм является цикличным и по- |
к системе плавного движения скипов. |
|||||||
вторяется в каждом цикле спуска-подъема |
3. Опыт |
эксплуатации |
шахтных |
|||||
сосуда. |
|
|
|
подъемных установок с |
регистраторами |
|||
Алгоритм |
работы АПК |
контроля |
параметров свидетельствует о возможно- |
|||||
плавности движения скипов основан на |
сти надежного контроля состояния систе- |
|||||||
обработке данных: |
|
мы «подъемный сосуд – армировка». |
||||||
– о положении скипа в шахтном |
Список литературы |
|||||||
стволе (для определения места нарушения |
||||||||
плавности); |
|
|
|
1. Федеральные нормы и правила в |
||||
– скорости сосуда (для определения |
||||||||
области промышленной |
безопасности |
|||||||
факта нарушения плавности); |
|
«Правила безопасности при ведении гор- |
||||||
– токе |
якоря подъемного |
двигателя |
||||||
ных работ и переработке твердых полез- |
||||||||
(для определения факта нарушения плав- |
ных ископаемых». Сер. 03. Вып. 78 / На- |
|||||||
ности); |
|
|
|
уч.-техн. центр исследований проблем |
||||
– токе регулятора давления рабочего |
||||||||
пром. безопасности. – М., 2014. – 276 с. |
||||||||
тормоза (для исключения ложных сраба- |
2. Эксплуатация шахтных подъемных |
|||||||
тываний при рабочем торможении); |
||||||||
установок / под ред. Г.Д. Трифанова. – |
||||||||
– состоянии реле предохранительно- |
||||||||
Пермь: Изд-во Перм. нац. исслед. поли- |
||||||||
го тормоза (для исключения ложных сра- |
техн. ун-та, 2015. – 315 с. |
|
|
|||||
батываний |
при |
предохранительном тор- |
|
|
|
|
||
можении);
–состоянии реле пуска подъемной машины (для контроля исправности каналов тахогенератора и тока якоря);
–напряжении тахогенератора (для контроля исправности каналов измерения скорости и тока якоря).
Результатом работы алгоритма является выдача предупредительного сообщения на экран, звукового оповещения и
14
УДК 621.311.238:681.513.6
АДАПТИВНОЕ УПРАВЛЕНИЕ АВТОНОМНЫМИ
ИНЕАВТОНОМНЫМИ ГАЗОТУРБИННЫМИ ЭЛЕКТРОСТАНЦИЯМИ
СУЧЕТОМ ЭЛЕКТРИЧЕСКОЙ НАГРУЗКИ
Б.В. Кавалеров, Г.А. Килин, И.А. Бахирев
Пермский национальный исследовательский политехнический университет
Рассмотрены особенности управления газотурбинными электростанциями малой и средней мощности с учетом электрической нагрузки. Показано, что управление такими электростанциями составляет серьезную проблему. Обоснована необходимость учитывать динамику электрической нагрузки. Показано, что для создания алгоритмов управления следует использовать динамическую модель электроэнергетической системы. Предложено создавать алгоритмы управления автономными и неавтономными газотурбинными электростанциями в классе адаптивных систем.
Ключевые слова: газотурбинная электростанция, система автоматического управления, математическая модель, адаптивные системы.
AUTONOMOUS AND NONAUTONOMOUS GAS TURBINE POWER STATION TAKING INTO ACCOUNT ELECTRIC LOADING ADAPTIVE CONTROL
B.V. Kavalerov, G.A. Kilin, I.V. Bahirev
Perm National Research Polytechnic University
Gas turbine power plants of low and average power control features taking into account electric loading are considered in this article. It is shown that control of such power station makes a serious problem. Need to consider dynamics of electric loading is proved. It is shown that for creation of control algorithms it is necessary to use dynamic model of electrical power system. It is offered to create control algorithms of independent and no autonomous gas turbine power plants in a class of adaptive systems.
Keywords: gas turbine power station, automatic control system, mathematic model, adaptive systems.
Введение |
|
|
В настоящее время широко исполь- |
ными электростанциями |
сталкиваются |
зуются газотурбинные электростанции, |
с тем обстоятельством, что образуется |
|
создаваемые на основе конвертирован- |
единая динамическая система, в которой |
|
ных авиационных двигателей. Такие |
и генератор, и электрическая сеть (на- |
|
электростанции могут работать или па- |
грузка) взаимно влияют друг на друга. |
|
раллельно на сеть, или в автономном |
В связи с этим при разработке перспек- |
|
режиме на выделенную нагрузку. Для |
тивных алгоритмов управления газотур- |
|
каждого режима существует специфика |
бинными электростанциями возникают |
|
при управлении такими электростанция- |
две взаимосвязанные задачи. Во-первых, |
|
ми. Например, в случае работы на мощ- |
необходимо исследовать |
максимально |
ную сеть напряжение и частота поддер- |
большое число возможных режимных |
|
живаются другими генераторами сети, а |
ситуаций в этой динамической системе, |
|
при автономной работе они могут при- |
во-вторых, как можно лучше учесть эти |
|
нимать любое значение в зависимости от |
изменения. Для решения первой задачи |
|
электрической нагрузки, активной и ре- |
следует использовать методы математи- |
|
активной мощности электрогенератора. |
ческого моделирования, так как прове- |
|
Более того, при управлении газотурбин- |
дение большого числа экспериментов на |
|
15
реальной электрической сети крайне затруднительно. При решении второй задачи перспективно строить алгоритмы управления в классе адаптивных систем, что позволит оперативно учитывать большое число разнородно влияющих факторов и режимных ситуаций системы электроснабжения на показатели качества вырабатываемой электроэнергии.
Газотурбинные установки для электроэнергетики
Пермским авиамоторостроительным комплексом разработаны и серийно выпускаются электроэнергетические газотурбинные установки (ГТУ) мощностью до 25 МВт [1]. Конвертированные авиационные установки обладают целым комплексом положительных качеств для успешной эксплуатации в качестве привода электростанции [2]. К сожалению,
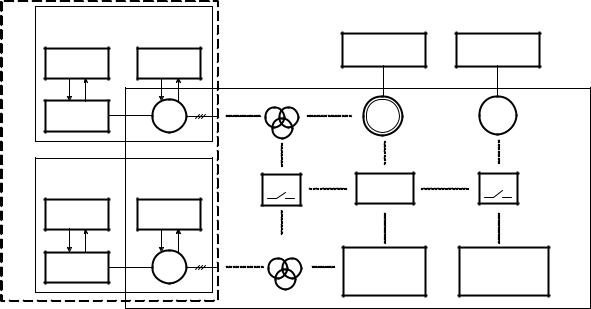
двухвальная конструкция с отсутствием механической связи между валами затрудняет управление такими ГТУ. Ситуация дополнительно осложняется взаимовлиянием ГТУ, электрогенератора и системы электроснабжения. При этом образуется единая динамическая система (рис. 1) [3]. Возникает проблема многосвязности [4, 5] при управлении электростанцией.
Как следствие, при эксплуатации газотурбинных электростанций остаются нерешенными многие проблемы, среди которых, например, отмечаются следующие: потеря устойчивости в силу взаимовлияния САУ ГТУ и САУ ГТЭС; отключения при значительных (25–30 % номинала) набросах и сбросах нагрузки; отключения при изменении режимов (с параллельного на автономный и др.); проблемы качества переходных процессов по напряжению и частоте и др.
|
Энергоблок 1 |
|
|
|
|
|
|
САУ ГТУ |
САУ СГ |
|
Механическая |
Механическая |
|
|
|
|
|
|||
|
|
|
|
|
||
электростанцияГазотурбинная |
УУ ГТУ 1 |
УУ СГ |
|
нагрузка |
нагрузка |
системаЭлектроэнергетическая |
|
|
Трансформатор 1 |
АД |
СМ |
||
|
|
|
|
|||
|
ГТУ 1 |
СГ 1 |
|
|
||
|
|
1…m |
1…k |
|
||
|
|
|
|
|
||
|
Энергоблок п |
|
|
|
ВВ s |
|
|
САУ ГТУ |
САУ СГ |
ВВ 1 |
ЛЭП 1…i |
|
|
|
УУ ГТУ n |
УУ СГ n |
|
|
|
|
|
|
|
Трансформатор n |
Активно- |
Внешняя сеть |
|
|
ГТУ n |
СГ n |
|
|
||
|
|
индуктивная |
бесконечной |
|
||
|
|
|
|
нагрузка 1…i |
мощности |
|
Рис. 1. Взаимосвязанная динамическая система: САУ – система автоматического управления; УУ – устройство управления; ВВ – высоковольтный выключатель; АД – асинхронный двигатель; СМ – синхронная машина; ЛЭП – линия электропередачи
16
Исходя из этого актуальной задачей |
уравнений Парка–Горева. Модель взаи- |
|||||||||||
является совершенствование алгоритмов |
модействия элементов основана на том, |
|||||||||||
управления ГТУ для улучшения качества |
что в каждый момент времени система |
|||||||||||
вырабатываемой электроэнергии. По- |
рассматривается как статическая, поэто- |
|||||||||||
скольку |
система |
электроснабжения |
не |
му становится возможным использовать |
||||||||
позволяет в широких пределах и, глав- |
матрицу инциденций для описания кон- |
|||||||||||
ное, оперативно проводить широкий |
фигурации системы и состава ее струк- |
|||||||||||
спектр экспериментов по исследованию |
турных элементов, динамический режим |
|||||||||||
САУ, особенно в подкритических режи- |
получается как последовательность пе- |
|||||||||||
мах, целесообразно такие исследования |
рехода на каждом шаге расчета от одно- |
|||||||||||
проводить на моделях. Необходима мо- |
го статического режима к другому [7, 8]. |
|||||||||||
дель единой взаимосвязанной системы, |
При принятом подходе к моделиро- |
|||||||||||
показанной на рис. 1, и программный |
ванию |
сложной системы |
структурные |
|||||||||
комплекс, реализующий эту модель с |
элементы |
обмениваются |
между собой |
|||||||||
удобным для пользователя интерфейсом. |
внешними переменными, по этой причи- |
|||||||||||
Модель для исследований |
|
не становится |
возможным постепенное |
|||||||||
|
уточнение |
математического |
описания |
|||||||||
|
|
|
|
|
|
|
||||||
Перечислим |
основные |
требования |
элемента. Данный метод последователь- |
|||||||||
к математической модели: |
|
|
|
ного расширения модели введением до- |
||||||||
– воспроизведение |
статических |
и |
полнительных |
факторов или |
процессов |
|||||||
динамических режимов работы; |
|
|
приводит к созданию модели, обладаю- |
|||||||||
– воспроизведение автономных ре- |
щей должной |
степенью |
адекватности. |
|||||||||
жимов работы электростанций, парал- |
В зарубежной литературе подобный под- |
|||||||||||
лельных режимов совместно с другими |
ход получил название «модельно- |
|||||||||||
электростанциями, режимов работы на |
независимый» [9]. |
|
|
|||||||||
мощную сеть; |
|
|
|
|
|
Таким образом, математическая мо- |
||||||
– моделирование |
различных вари- |
дель |
каждого |
структурного |
элемента |
|||||||
антов комплексной нагрузки электро- |
включает две составляющие: |
|
||||||||||
станций: |
двигательная, осветительная |
1) внутренняя модель |
– |
уравнения |
||||||||
и т.п.; |
|
|
|
|
|
|
динамики элемента (для расчета пере- |
|||||
– изменения в процессе моделиро- |
менных элемента системы); |
|
||||||||||
вания в конфигурации электроэнергети- |
2) внешняя модель – уравнения свя- |
|||||||||||
ческой системы и в составе структурных |
зи элемента (для связи данного элемента |
|||||||||||
элементов; |
|
|
|
|
|
с другими элементами системы). |
||||||
– моделирование систем автомати- |
Структура |
комплексной |
универ- |
|||||||||
ческого управления синхронных генера- |
сальной математической модели элемен- |
|||||||||||
торов, средств релейной автоматики, |
та показана на рис. 2. |
|
|
|||||||||
синхронизации, автоматического по- |
На рисунке обозначены: IS – внеш- |
|||||||||||
вторного включения и т.п.; |
|
|
|
ние (статорные) токи элемента; US – |
||||||||
– математическая |
модель |
должна |
внешние (статорные) напряжения эле- |
|||||||||
ориентироваться на удобство алгоритми- |
мента; I – полный вектор токов элемен- |
|||||||||||
зации для включения в состав программ- |
та ЭЭС; {P} |
– множество параметров |
||||||||||
ных моделирующих комплексов [6]. |
|
модели элемента; M – внешние механи- |
||||||||||
Модель строится на основе описа- |
ческие воздействия; Uf – внешние воз- |
|||||||||||
ния физики процессов в элементах элек- |
действия со стороны средств регули- |
|||||||||||
троэнергетической системы |
на |
основе |
рования электрических переменных. Как |
|||||||||
17
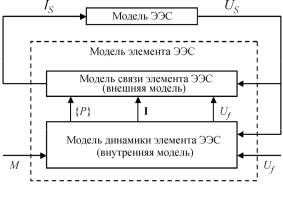
видно из рисунка, внешняя модель |
гулирования возбуждения (РВ) – посто- |
|||||||||
формируется |
на |
основе |
внутренней |
янные, при наличии РВ – меняются на |
||||||
модели элемента, при этом параметры |
каждом шаге расчета. |
|
|
|||||||
обеих моделей общие, т.е. множество |
Решения уравнений дают прира- |
|||||||||
параметров {P} внешней модели повто- |
щения токов на каждом шаге расчета, |
|||||||||
ряет множество параметров внутренней |
причем токов внешних (статорных), |
|||||||||
модели. |
|
|
|
посредством которых элемент взаимо- |
||||||
|
|
|
|
действует с другими элементами сис- |
||||||
|
|
|
|
темы. Изменение этих токов влечет за |
||||||
|
|
|
|
собой изменение внешних (статорных) |
||||||
|
|
|
|
напряжений U, которые входят в урав- |
||||||
|
|
|
|
нения. Тем самым статорные напряже- |
||||||
|
|
|
|
ния U наряду с воздействиями со сторо- |
||||||
|
|
|
|
ны средств управления H являются |
||||||
|
|
|
|
внешними воздействиями (возмущения) |
||||||
|
|
|
|
для уравнений, а статорные (внешние) |
||||||
|
|
|
|
токи – это реакция элемента на текущее |
||||||
Рис. 2. Структура комплексной универсальной |
значение токов I и внешних воздействий |
|||||||||
(U и Н). |
|
|
|
|
||||||
|
модели элемента |
|
В результате программной реали- |
|||||||
|
|
|
|
|||||||
Систему |
уравнений |
структурного |
зации |
рассмотренной модели |
построен |
|||||
элемента ЭЭС относительно внешних пе- |
целый |
ряд программных |
комплексов |
|||||||
ременных можно представить в общем |
для исследования алгоритмов управле- |
|||||||||
виде следующим векторно-матричным |
ния газотурбинными электростанциями |
|||||||||
уравнением |
(уравнения моментов для |
(рис. 3–5) [10]. |
|
|
|
|
||||
вращающихся машин здесь не рассмат- |
Для того чтобы было удобно произ- |
|||||||||
водить проверку алгоритмов управления, |
||||||||||
риваются, поскольку механическое взаи- |
||||||||||
модействие рассматривается отдельно): |
в состав программных комплексов вклю- |
|||||||||
чены |
модули |
идентификации |
(рис. 6) |
|||||||
pIS = ±AU −BI −H, |
||||||||||
и настройки САУ (рис. 7). |
|
|
||||||||
где I – вектор токов элемента; pIS – век- |
|
Алгоритмы управления |
||||||||
тор производных |
внешних |
(статорных) |
|
|||||||
|
для настройки |
|
|
|||||||
токов элемента; U – вектор напряжений, |
|
|
|
|||||||
|
|
|
|
|
|
|||||
приложенных между внешними зажима- |
Разработанная модель и програм- |
|||||||||
ми элемента; A, B – матрицы, размер- |
мные |
комплексы |
делают |
возможным |
||||||
ность которых зависит от системы коор- |
исследование различных, в том числе |
|||||||||
динат, в которых моделируется струк- |
перспективных, САУ электростанция- |
|||||||||
турный элемент, а также от того, полные |
ми. Можно проводить большое число |
|||||||||
это уравнения или упрощенные; H – век- |
экспериментов за ограниченное время. |
|||||||||
тор, определяющий воздействие на эле- |
Именно поэтому, исходя из характера |
|||||||||
мент со стороны средств регулирования |
объекта управления и условий эксплуа- |
|||||||||
электрических параметров. |
Компоненты |
тации ГТУ, следует предусмотреть |
||||||||
вектора H для пассивных элементов |
использование алгоритмов управления, |
|||||||||
электрической системы нулевые, для |
построенных |
в |
классе |
адаптивных |
||||||
синхронных машин при отсутствии ре- |
систем. |
|
|
|
|
|||||
18
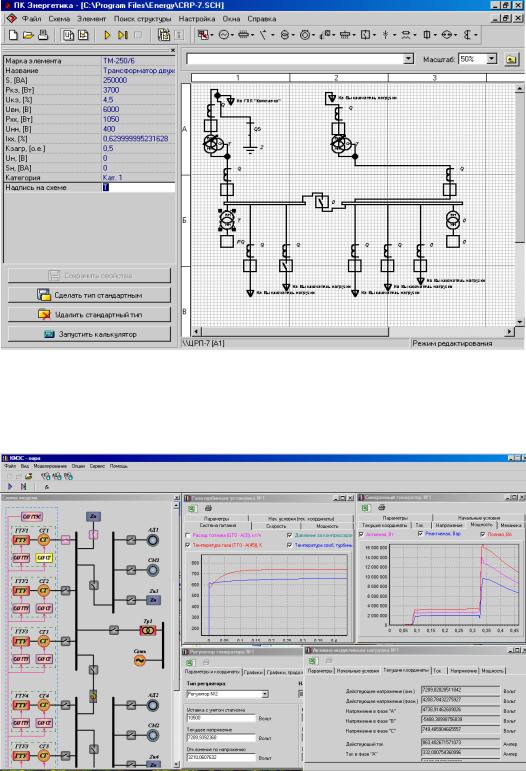
Рис. 3. Интерфейс программного моделирующего комплекса «Power System Supply»
Рис. 4. Интерфейс программного комплекса «КМЭС» для испытания и настройки САУ ОАО «Авиадвигатель»
19
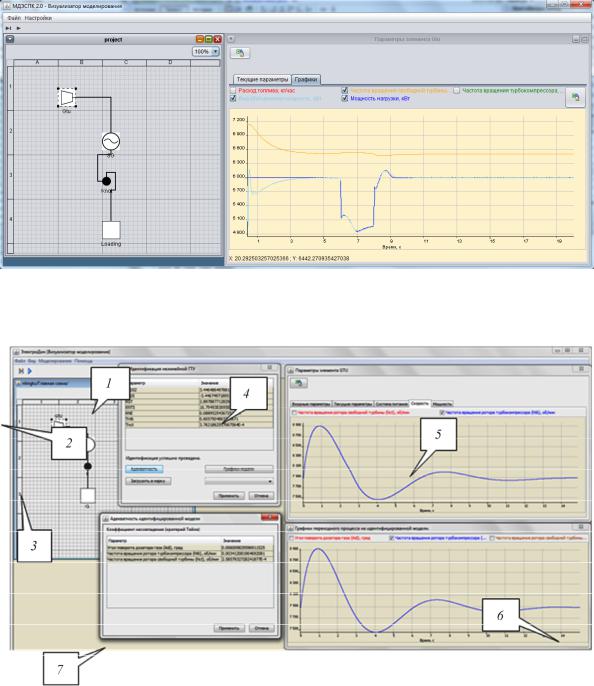
Рис. 5. Пользовательский интерфейс приложения «Визуализатор моделирования» «МДЭСПК 2.0»
Рис. 6. Модуль идентификации программного комплекса «ЭлектроДин»: 1 – главное меню приложения «Визуализатор моделирования»; 2 – панель моделирования; 3 – окно отображения схемы проекта; 4 – главное меню модуля идентификации с коэффициентами модели; 5 – окно отображения результатов исходной модели; 6 – окно отображения результатов быстрорешаемой модели; 7 – окно оценки адекватности модели
20