

1461
.pdf–управление главным приводом;
–управление рабочим и предохранительным торможением;
–система защит и блокировок;
–система визуализации, архивирования и хранения информации.
Технические характеристики КПА |
|
Напряжение сети, В......................................................... |
660 |
Максимальная скорость подъема, м/с............................ |
5,0 |
Погрешность контроля скорости, м/с............................ |
0,1 |
Максимальная длина откатки, м .................................... |
2300 |
Погрешность контроля положения сосуда, м............... |
0,1 |
Количество горизонтов (заездов), не более................... |
5 |
Количество путевых выключателей, не более.............. |
20 |
Собственное время срабатывания защит от |
|
переподъема и превышения скорости, с, не более....... |
0,1 |
Частота, Гц ....................................................................... |
50 |
Габаритные размеры, мм, не более................................ |
1200×650×1100 |
Масса, кг, не более........................................................... |
400 |
На рис. 13.6 приведена функциональная схема КПА, когда в качестве главного привода ШППМ применен асинхронный электродвигатель с короткозамкнутым ротором, управляемый преобразователем частоты ПЧВ-250.
Рис. 13.6. Функциональная схема КПА
371
Взаимодействие между системами осуществляется главным контроллером К, на вход которого подаются входные сигналы:
–через блок ввода-вывода БВВ сигналы о состоянии аппаратов защиты
иблокировки, преобразователя частоты, системы охлаждения;
–через блоки искровой защиты БИЗ сигналы от датчика положения подъемных сосудов ДП и от датчика скорости ДС;
–через блок управления тормозом БУТ сигналы от органов управления тормозом ОУТ;
–от органов управления главным приводом ОУП команды «Пуск», «Стоп», «Вперед», «Назад».
Блок программирования искробезопасный БПИ служит для выбора режимаработы (работа/настройка) инастройки параметровихарактеристикКПА.
Вглавном контроллере К в соответствии с программой настройки параметров работы подъемной установки и логической обработкой входных сигналов вырабатываются выходные сигналы управления главным приводом
итормозом, обеспечиваются функции системы защит и блокировок, осуществляются формирование и запись массива данных, архивирование и хранение информации о работе подъемной установки.
Для управления главным приводом служат блок ОУП и командоаппарат задания скорости КАЗС. Аппаратами управления ОУП производятся выбор направления движения («Вперед» или «Назад») и пуск подъемной установки, командоаппаратом КАЗС, выполняется управление скоростью.
Состояние аппаратов управления и защит главного привода контролируется на панели индикации ПИ ОУП. Для проверки и взвода защит устройства управления главным приводом (ПЧВ-250) на блоке ОУП предусмотрены соответствующие органы управления.
Текущее положение подъемного сосуда (состава вагонеток) в стволе определяется главным контроллером К на основании кода датчика положения ДП, установленного на выходном валу редуктора подъемной машины. В качестве датчика положения ДП используется абсолютный поворотный энкодер, сохраняющий код текущего положения при снятии напряжения питания.
Текущая скорость подъемного сосуда вычисляется главным контроллером К на основании количества импульсов датчика скорости ДС. Датчик скорости ДС устанавливается на главном валу подъемной машины.
После логической обработки сигналов, поступивших от блока ОУП, блока управления тормозом БУТ, датчиков текущего положения и скорости подъемных сосудов, сравнения их с заданной тахограммой движения главный контроллер через блок ввода-вывода БВВ формирует выходные сигналы для управления главным приводом (пуск ПЧ, «Вперед», «Назад», текущая скорость, «Стоп», «Аварийный стоп»).
372
Для управления тормозным устройством подъемной установки служат блоки ОУТ, БУТ и командоаппарат рабочего тормоза КАТР. Органами управления ОУТ производится управление тормозом предохранительным и режимом перестановки (для двухбарабанных подъемных машин). Командоаппарат КАТР служит для управления рабочим тормозом.
Блок БУТ является источником питания электромагнитных клапанов для подъемных машин с пружинно-гидравлическим приводом тормоза или воздухораспределительных клапанов с электропневматическими вентилями для подъемных машин с пружинно-пневматическим приводом тормоза, в том числе и автономного питания для осуществления избирательного торможения.
Для контроля давления воздуха (масла) в тормозных цилиндрах в блоке ОУТ установлены стрелочные индикаторы (миллиамперметры) «левый цилиндр», «правый цилиндр», источником сигнала для которых служат датчики давления ДД1 и ДД2, установленные в панели управления (станции управления) тормозом.
Логический контроллер блока БУТ управляет питанием электроклапанных устройств и регулятором давления тормозной системы на основании команд блока ОУТ, командоаппарата рабочего торможения КАТР и главного контроллера К.
Компьютер визуализации РС и монитор М в режиме «настройка» обеспечивают настройку защитной тахограммы, настройку режима работы подъемной установки, синхронизацию датчиков положения, проверку ограничителя скорости.
В рабочем режиме компьютер визуализации РС и монитор М отображают оперативную информацию о состоянии защит, местоположении в стволе, направлении и скорости движения подъемных сосудов, необходимую машинисту подъема для управления подъемной установкой.
Дополнительная информация отображается на мониторе при возникновении неисправностей, аварийных ситуаций или при ошибочных действиях машиниста подъема или обслуживающего персонала:
–неисправности блокировок, препятствующих выполнению основных технологических функций;
–сведения о причинах аварийной остановки;
–неисправности датчиков и контрольных цепей;
–ошибочные действия персонала;
–архивная и справочная информация.
Остальная информация может быть отражена при необходимости. Конструктивно основные узлы и блоки КПА выполнены в виде пульта
управления.
373
Влевом отсеке расположена система управления рабочим и предохранительным тормозом. На его лицевой стороне расположены стрелочные индикаторы для отображения информации о давлении в тормозных цилиндрах, кнопки включения и отключения машины, переключатель перестановки барабанов (используется для двухбарабанных подъемных машин). Управление рабочим тормозом осуществляется с помощью командоаппарата КАТР, установленного на левой консоли.
Вцентральном отсеке расположены главный контроллер, элементы системы отображения и ввода-вывода. На лицевой панели установлены монитор, защищенный поликарбонатным листом, стрелочный указатель скорости, ключ, кнопки программирования.
Вправом отсеке расположена система управления главным приводом. На лицевой панели установлены стрелочные индикаторы тока главного привода и напряжения сети, светодиодная мнемосхема состояния всех аппаратов главного и вспомогательных приводов. На правой консоли размещены командоаппарат задания скорости, кнопки задания направления движения «Вперед», «Назад».
Правый отсек разработан в 2 модификациях: для подъемных машин с асинхронным двигателем с фазным ротором с ВЖР в цепи ротора и для подъемных машин с приводом ПЧ-АД.
КПА обеспечивает следующие защиты и блокировки:
–блокировку, не допускающую снятия предохранительного тормоза и включение главного привода при неисправности аппаратуры или повреждении датчиков и цепей управления;
–блокировку от чрезмерного износа тормозных колодок;
–защиту от провисания струны и напуска каната;
–блокировку, позволяющую включать главный привод после переподъема сосуда только в направлении ликвидации переподъема;
–блокировку, не допускающую снятия предохранительного тормоза, если рукоятка командоаппарата управления рабочим тормозом КАТР не находится в положении «заторможено», а рукоятка командоаппарата задания скорости главного привода – в нулевом положении;
–защиту от переподъема;
–защиту от превышенияскорости, определяемойзащитной тахограммой;
–защиту от повреждения кинематической цепи датчиков перемещения
искорости.
13.7. Блок контроля положения и скорости БКПС
Блок контроля положения и скорости БКПС (далее – БКПС) предназначен для определения и контроля положения и скорости подъемного сосуда на шахтных
374
подземных и поверхностных, одно- и двухконцевых подъемных установках в вертикальныхинаклонныхвыработкахшахт, опасныхпогазуи(или) угольнойпыли.
БКПС разработан взамен аппаратов контроля положения и скорости подъемных сосудов ШПА, ОСП и подобных аппаратов.
БКПС выполняет следующие функции:
–определение положения подъемных сосудов (сосуда) в стволе;
–определение скорости подъемного сосуда;
–подачу сигнала подхода сосуда к приемным площадкам;
–формирование сигнала переподъема;
–формирование сигнала текущей скорости и положения;
–контроль кинематических цепей датчиков положения и скорости;
–задание защитной тахограммы;
–постоянный контроль скорости по защитной тахограмме;
–автоматический непрерывный самоконтроль исправности БКПС;
–блокировку от самовосстановления схемы аппарата после исчезновения (устранения) причины его срабатывания;
–световую индикацию с запоминанием, сигнализирующую отдельно о срабатывании узла контроля скорости и узла контроля исправности аппарата;
–индикацию разности между фактической скоростью движения и скоростью по защитной тахограмме;
–проверку исправности и правильности функционирования;
–регистрацию, хранение и архивацию информации об аварийных отключениях;
–регистрацию диаграммы работы подъемной установки;
–контроль напряжения источника питания;
–выбор режимов работы «груз», «люди», «ревизия»;
–автоматическую установку в режим «ревизия» при восстановлении ранее снятого напряжения питания.
Основным элементом устройства БКПС является контроллер К. Программное обеспечение предусматривает универсальное использование контроллера. Настройкой параметров достигается применение одного и того же устройства как для вертикального поверхностного подъема, так и для наклонного подземного.
Дискретные входные сигналы БКПС вводятся в контроллер К через устройство ввода БВВ. К входным сигналам относятся настройки органов управления БКПС и выбранный режим работы ПУ (груз, люди, ревизия) для поверхностных ПУ.
На рис. 13.7 приведена функциональная схема БКПС.
Дискретные выходные сигналы выводятся через устройство вывода БВ
иподключаются в цепь защиты и управления ПУ.
375

Аналоговый сигнал величины текущей скорости может быть подан на стрелочный прибор пульта машиниста.
Отображение положения и скорости подъемного сосуда, подача сигналов подхода и индикация состояния аппаратов контроля положения и скорости обеспечиваются блоком индикации БИ, встраиваемым в пульт машиниста взамен сельсин-приемника либо блоком визуализации БЗВ, представляющим собой взрывозащищенное (для подземного варианта) средство отображения на основе персонального компьютера.
Рис. 13.7. Функциональная схема БКПС
Индикация состояния датчиков и защит БКПС осуществляется также блоком сигнализации БС, расположенным на лицевой панели устройства.
Архивирование информации о срабатывании элементов контроля за положением и скоростью подъемных сосудов, тахограммы работы подъемной установки осуществляется контроллером К с выводом на устройство флеш-памяти Ф. Изъятие устройства Ф возможно только при отключении БКПС от питающей сети. Просмотр сохраненных данных на устройстве Ф возможен на любом персональном компьютере с помощью соответствующих офисных приложений.
376
Информация о работе ПУ в полной мере может быть получена на поверхности шахты при подключении устройства БКПС к линии комплекса мониторинга оборудования КМО. В этом случае возможно создание журнала работы подъемной установки (с учетом записи тахограммы движения, производительности и пр.) непосредственно у диспетчера или специально назначенного лица.
Блок индикации БИ оснащен светодиодными линейками для отображения текущей скорости, рассогласования текущей скорости и скорости по защитной тахограмме, грубого и точного положения сосуда; акустическим излучателем для подачи сигнала подхода; светодиодными индикаторами для отображения состояния элементов защиты, контроля положения и скорости подъемных сосудов. БИ имеет автономное питание, позволяющее контролировать положение подъемного сосуда в стволе при снятии питания с устройства БКПС. Для двухконцевого подъема требуется установка двух блоков индикации БИ.
Настройка и ввод параметров программного обеспечения контроллера К, а также корректировка параметров визуализации блока индикации БИ производятся блоком ввода параметров БВП, органы управления которого находятся на лицевой панели устройства БКПС.
Датчики ДС и ДП являются источниками сигнала для контролера К для вычисления текущей координаты и скорости подъемных сосудов. В искробезопасном варианте исполнения указанные сигналы вводятся в контроллер К через блоки искровой защиты БИЗ.
Текущее положение подъемных сосудов (состава вагонеток) в стволе определяется главным контроллером К на основании кода датчика положения ДП, установленного на выходном валу редуктора подъемной машины. В качестве датчика положения ДП используется абсолютный поворотный энкодер, сохраняющий код текущего положения при снятии с него напряжения.
Текущая скорость подъемного сосуда вычисляется главным контроллером К на основании количества импульсов датчика скорости ДС. Датчик скорости ДС устанавливается на главном валу подъемной машины.
Для дополнительного контроля положения подъемных сосудов (для вертикального подъема) предусмотрено применение датчиков положения сосуда ДПС, устанавливаемых в стволе. Достоверность сигналов этих датчиков контролируется блоком контроля и гальванической развязки БГКР.
Блок БКП контролирует напряжение питания устройства БКПС. При несоответствующем напряжении питания блоком БКП формируется сигнал контроллеру К на включение выходного сигнала «контроль работы БКПС», введенного в цепь защиты ПУ.
377
Глава 14 ЗАЩИТНЫЕ И БЛОКИРОВОЧНЫЕ УСТРОЙСТВА
14.1. Общие сведения
Для обеспечения безопасной работы подъемная установка должна быть оборудована защитными и блокировочными устройствами, которые можно разделить на следующие группы:
–требующие немедленного включения предохранительного тормоза;
–позволяющие завершить цикл, но запрещающие дальнейшую работу подъема;
–сигнализирующие о неисправности элементов оборудования, которые допускают работу подъемной установки непродолжительное время при выполнении мероприятий, обеспечивающих безопасную эксплуатацию подъема до устранения неисправности;
–предусматривающие определенную последовательность действий (операций) при управлении подъемной машиной, исключающие создание аварийных ситуаций при неправильных действиях обслуживающего персонала.
Все защиты и блокировки, требующие немедленного включения предохранительного тормоза, включаются в цепь управления контактором предохранительного тормоза ТП (цепь защиты). В эту цепь (рис. 14.1) должны быть включены кнопки аварийного включения предохранительного тормоза АК1 и АК2, одна из которых грибкового типа («ладонная» аварийная кнопка красного цвета) установлена на верхней панели пульта управления подъемной машиной, а другая – на полу пульта управления под ногой машиниста («ножная» аварийная кнопка). Целесообразно, чтобы «ладонная» аварийная кнопка была с фиксацией.
Цепь защиты и управления предохранительным тормозом должна быть собрана таким образом, чтобы исключить потерю управляемости контакторами предохранительного тормоза и обеспечить аварийными кнопками надежное отключение контакторов ТП и включение предохранительного тормоза подъемной машины.
С этой целью аварийные кнопки АК1 и АК2 должны включаться между одним из полюсов питания схемы управления и непосредственно с выводом катушки ТП, а контакты всех аппаратов защиты и блокировок должны включаться со стороны другого вывода катушки ТП. При этом на подъемных машинах с электроклапанным управлением предохранительным тормозом аварийные кнопки одновременно с разрывом цепи ТП должны разрывать цепь электроклапанных устройств предохранительного тормоза МТП1, МТП2 и цепь катушек реверсора В, Н подъемного двигателя (см. рис. 14.1, а).
378
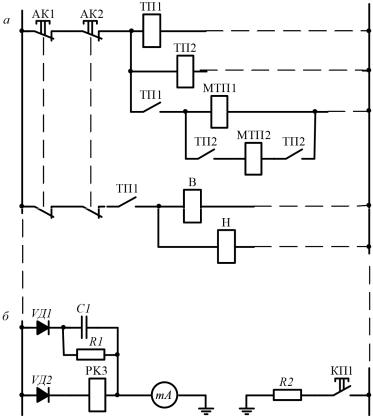
Далее на рисунках подразумевается только такое включение аварийных кнопок в цепях ТП, электроклапанных устройств и реверсора, поэтому эти кнопки на последующих рисунках не показаны.
Рис. 14.1. Схема включения аварийных кнопок (а)
и схема контроля изоляции в цепях управления и защиты (б)
При питании катушки контактора ТП от однофазной сети переменного тока она должна подключаться одним выводом к «нулю», а другим выводом через все аппараты управления работой контактора – к «фазе». Это относится к любой схеме управления. Такое подключение обеспечивает надежное отключение контактора (реле) при замыканиях на «землю» в схеме управления. В случае питания контактора ТП через разделительный трансформатор вывод катушки, подключенныйнепосредственнона полюспитания, долженбытьзаземлен.
Снижение изоляции полюса питания (при питании цепи защиты от источника постоянного тока), подключенного через аппараты защиты и блокировок к катушке ТП, и замыкание на «землю» в любой точке цепи защиты при определенной величине тока утечки на «землю» (зависит от типа контак-
379
тора ТП) могут привести к тому, что при срабатывании аппарата защиты контактор ТП не отключится. Поэтому необходимо контролировать величину сопротивления изоляции (величину утечки) именно со стороны этого полюса питания схемы. Такой контроль может быть осуществлен, например, схемой, приведенной на рис. 14.1, б. Ток срабатывания реле контроля замыкания на землю РКЗ должен быть не более 10 мА (т.е. в 1,5–2 раза меньше, чем ток отпадания контактора ТП). Для проверки работы схемы контроля изоляции служат дополнительный резистор R2 (100 кОм) и кнопка проверки КП1.
Для устранения влияния емкостных токов в момент переходных процессов при включении и отключении аппаратов в контролируемой сети в схему введены диодыVД1 иVД2, конденсаторС1 (4 мкФ, 400 В), резисторR1 (20 кОм).
При срабатывании реле РКЗ включается сигнализация, а на автоматизированных подъемах его размыкающий контакт включается в цепь запрета пуска машины.
Защиты и блокировки могут выполнять свои функции только при правильном их монтаже, наладке и соблюдении всех требований руководств по эксплуатации заводов-изготовителей.
Ревизия и наладка всех аппаратов, схем защиты и блокировок производятся при вводе подъемной машины в эксплуатацию и при регламентных (ежегодных) ревизиях и наладках подъемной установки.
Действие основных защит и блокировок (перечень определяется инструкцией для машиниста подъема) должно проверяться ежесменно при прие- ме-передаче смены машинистами. Главный механик ежемесячно, а старший механик не реже одного раза в 15 дней должны проверять правильность работы защитных устройств [6, 25].
14.2. Требования к схемам защит и блокировок
Опыт эксплуатации и наладки показывает, что надежная и безопасная эксплуатация подъемной установки обеспечивается при условии, что аппараты
исхемы защит и блокировок отвечают следующим основным требованиям:
–высокая надежность;
–стабильность работы и отсутствие ложных срабатываний;
–простота настройки и проверки действия защит;
–высокая степень самоконтроля элементов и схем, а также резервированиеаппаратов основных защит, если необеспечиваетсяполныйсамоконтроль.
При проектировании, монтаже и наладке защит следует добиваться наиболее полного выполнения указанных требований.
Каждая подъемная установка в соответствии с ее назначением, типом подъемных сосудов и другими особенностями должна иметь следующие защитные и блокировочные устройства:
380