

Виброакустическая диагностика технических объектов
..pdfНа рис. 4.12, а показан исходный косинусоидальный сигнал во временной и частотной областях, а на рис. 4.12, б – сигнал, полученный в результате возведения в квадрат исходного сигнала, и соответствующий этому преобразованию частотный спектр. Отметим, что показанный на рис. 4.12, б частотный спектр также можно получить путем свертки показанного на рис. 4.12, а спектра с тем же спектром, т.е. путем операции, эквивалентной умножению исходного косинусоиального сигнала на тот же сигнал. Следовательно, полученный в результате свертывания спектр содержит лишь составляющие, соответствующие совпадению по меньшей мере двух дельта-функций исходного спектра, т.е. составляющие с частотами 0, + f0 и –2f0. В случае f = 0 наблюдается совпадение двух пар дельта-функций, так что соответствующая составляющая результирующего спектра принимает значение А2/4 + А2/4 = А2/2. При f = ±2f0 совпадают друг с другом дельта-функции, присущие положительной и отрицательной частотам свертываемых спектров, а соответствующие составляющие результирующего спектра принимают равные А2/4 значения. Очевидно, что истинное среднее значение равно значению присущей нулевой частоте составляющей на рис. 4.12, б, т.е. А2/2. Эту составляющую можно выделить путем фильтрации возведенного в квадрат сигнала соответствующим фильтром нижних частот.
Рис. 4.12, в иллюстрирует фильтрацию фильтрами нижних частот с отличающимися друг от друга значениями частоты среза. Фильтр с более низкой частотой среза способствует более эффективному подавлению пульсаций (уменьшению флуктуаций) и, следовательно, его применение эквивалентно увеличению времени усреднения.
Связь между характеристиками фильтра нижних частот и эффективным временем усреднения подробно рассматривается далее (рис. 4.13). Из выражения (4.3) следует, что определенное на протяжении конечного и простирающегося от
–Т/2 до +Т/2 временного интервала среднее значение функции у(t) определяется интегральным выражением от мгновенного значения данной функции. В общем текущее среднее значение, получаемое в момент I в результате усреднения на протяжении временного интервала Т, определяется выражением
y t |
= 1 |
∫t |
y (t )dt . |
(4.4) |
|
T |
t −T |
|
|
|
|
|
|
Однако выражение (4.4) можно записать в виде формулы свертки, т.е.
|
= 1 |
∞ |
|
y t |
∫ y (t ) g (T − t )dt , |
(4.5) |
|
|
T |
−∞ |
|
|
|
|
в котором функция g(t) определена следующим образом:
g(t) = 1 при 0 <t<Т; g(t) = 0 при других значениях t. |
(4.6) |
81

Для более понятного представления на рис. 4.13, б–д показаны функ-
ции g(t), g(–t), g(T–t) и y(t)g(T–t).
Свертыванию оригиналов во временной области соответствует перемножение изображений (преобразование Фурье) в частотной области. Спектр амплитуды определенной выражением (4.6) прямоугольной функции g(t) имеет вид функции sin x / x , имеющей нулевые значения при частотах, кратных 1/T, и, по
существу, идентичной (с учетом соответствующего масштабного коэффициента) амплитудно-частотной характеристике фильтра –20 дБ/дек. нижних частот с наклоном от частоты среза, равной 1/πT. Соответствующая положительным значениям частоты половина кривой этой характеристики показана на рис. 4.14 в логарифмическом масштабе. Отметим, что нулевые точки, соответствующие кратным 1/T, также соответствуют целочисленным значениям числа периодов. Следовательно, интегрирование на протяжении любого целого числа периодов совершенно аннулирует все флуктуации. Отметим, что фазовая характеристика преобразование Фурье функции g(t) вообще не влияет на пропускаемую мощность и сказывается лишь на сдвиге фазы составляющей, соответствующей пульсации.
На основе сравнения выражения (4.5) с выражением (4.4) можно заключить, что определенная выражением (4.6) функция g(t) по существу соответствует импульсной характеристике устройства, осуществляющего текущее линейное усреднение на протяжении временного интервала Т. Однако создание устройства с такой импульсной характеристикой связано с большими практическими затруднениями и именно по этой причине на практике используются другие электронные устройства, работающие в качестве интеграторов или фильтров нижних частот. Одно из простейших и широко используемых электронных интегрирующих устройств имеет вид простой резистив- но-емкостной цепи (RC-цепи) с импульсной характеристикой:
g(t) = 0, −∞<t<0,
(4.7)
g(t) = et / RC , 0<t<∞.
Усреднение, осуществляемое с помощью устройств с определенной выражением (4.7) импульсной характеристикой, называется КС-усреднением, усреднением по показательному закону или экспоненциальным усреднением.
Отметим, что устройство с импульсной характеристикой в виде спадающей экспоненциальной функции в процессе усреднения придает наибольший вес самым последним участкам обрабатываемых сигналов.
На рис. 4.13, е–к показан процесс и результат свертывания с упомянутой экспоненциальной функцией, что можно сопоставить с функциями на рис. 4.13, а–д, относящимися к прямоугольной весовой функции согласно выражению (4.6).
82

Рис. 4.13. Текущее усреднение как свертка: а–д – линейная весовая функция; е–к – экспоненциальная весовая функция
Для сравнения экспоненциальной и прямоугольной весовых функций (рис. 4.14) масштаб соответствующих кривых выбран так, что Т = 2RC и, следовательно, площадь снизу обеих кривых идентична. Интеграторы с такими характеристиками и параметрами, удовлетворяющими выражению Т = 2RС, дают идентичные результаты при усреднении стационарных сигналов. Кроме того, их амплитудно-частотные характеристики имеют в частотной области идентичные как асимптоты, таки эффективные шириныполосы (см. рис. 4.14).
Отметим, что определяющее выражение амплитудно-частотной характеристики, соответствующей экспоненциальной импульсной характеристике согласно выражению (4.7), приведено в графическом виде на рис. 4.15, из которого следует, что при усреднении сигнала с их помощью приводят к одним и тем же результатам. Таким образом, для времени усреднения, равного нескольким периодам колебаний (практическое условие уменьшения амплиту-
83

ды до приемлемого значения), ввиду идентичных асимптот амплитудночастотных характеристик упомянутых выше фильтров нижних частот максимальная амплитуда колебаний при линейном усреднении на протяжении временного интервала ТА идентична максимальной амплитуде колебаний при экспоненциальном усреднении равной RС постоянной времени, причем
ТА = 2RС. |
(4.8) |
Рис. 4.14. Сравнение линейного и экспоненциального (RС) усреднения в частотной области
Следовательно, выражение (4.8) определяет эквивалентное время усреднения КС-схемы при обработке синусоидальных сигналов.
Колебания при усреднении на протяжении временных интервалов, длительность которых соответствует различным числам периодов, показаны на рис. 4.16. При усреднении узкополосного случайного шума (например, шума, получаемого путем фильтрации широкополосного шума узкополосным фильтром) справедливо, что относительная флуктуация (вариация) результата пропорциональна шумовой полосе используемого фильтра нижних частот. Выше было показано, что шумовая полоса фильтра с определенной выражением |sin х/х| амплитудно-частотной характеристикой (прямоугольная импульсная характеристика с интервалом T) равна 1/Т.
84
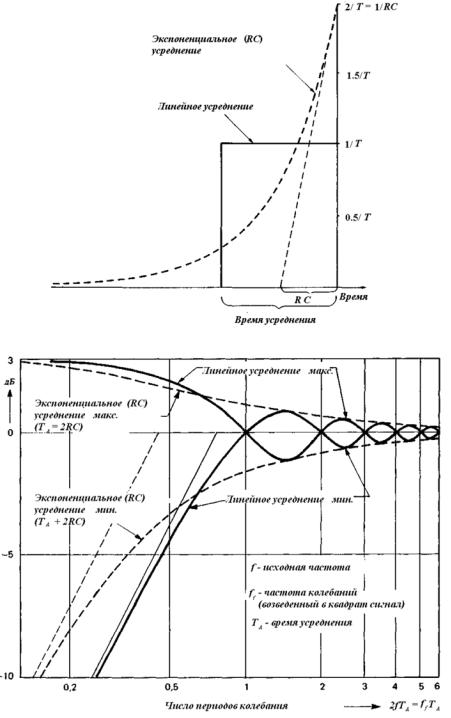
Рис. 4.15. Весовые функции, учитывающие в экспоненциальном (RC) усреднении
Рис. 4.16. Колебания при линейном и экспоненциальном (RС) усреднении возведенных в квадрат синусоидальных сигналов
85

Выражение (4.8) также определяет эквивалентное время усреднения при обработке стационарных случайных сигналов. Идентичное выражение также справедливо для серии импульсов (рис. 4.17). Следовательно, можно заключить, что выражение (4.8) определяет эквивалентное время усреднения при обработке всех сигналов.
Рис. 4.16 и 4.17 можно использовать при определении времени усреднения, нужного при обработке детерминированных сигналов, на основе заданного уровня амплитуды колебаний. При обработке случайных сигналов нужно обратиться к другому методу. Показано, что при обработке узкополосного случайного шума с полосой шириной В среднеквадратичным детектором с постоянной времени усреднения ТА относительное стандартное отклонение результата, т.е. доверительный интервал (σ) среднего квадратического значения, определяется выражением
σ = |
|
1 |
(для ВТА >> 1). |
(4.9) |
|
|
|||
2 |
BTA |
|
||
Рис. 4.17. Колебания при линейном и экспоненциальном усреднении импульсных сигналов
86

С учетом логарифмической градуировки в децибелах (дБ), выражение (4.9) можно записать в виде
σ = |
4,34 |
. |
(4.10) |
|
BTA
Рис. 4.18. Влияние времени усреднения на распределение погрешностей
Кривые на рис. 4.18, соответствующие трем значениям времени усреднения, иллюстрируют практическое значение выражения (4.9). Результат обработки случайного сигнала является случайной переменной, кривая плотности вероятности которой сужается и все более приближается к истинному значению (т.е. теоретическому значению при бесконечном времени усреднения) по мере роста времени усреднения.
Следовательно, даже при уменьшении времени усреднения можно получить достаточно точный результат, но во всяком случае за счет уменьшения достоверности. Путем интегрирования различных участков кривой плотности вероятности можно добиться заключения, что одиночная оценка будет с вероятностью 68,3 % находиться в расположенном симметрично относительно истинного значения интервале шириной ± σ. Аналогичным интервалам шириной ± 2 σ и ± 3 σ соответствуют равные 95,5 и 99,7 % значения вероятности.
Нужно подчеркнуть, что определенная выражением (4.10) эквивалентность не справедлива при обработке кратковременных сигналов. Анализ кратковременных сигналов будет осуществляться в следующих разделах.
87

4.2.3.Извлечение квадратного корня
Вподразд. 4.2.1 было описано применение СКЗ, с помощью которой осуществляется операция возведения в квадрат. Следовательно, сигналы х(t)
иу(t) соответственно на входе и на выходе такого устройства связаны друг с другом уравнением
у(t) = kх2(t). |
(4.11) |
Коэффициент k в уравнении (4.11) определяет масштаб параболической характеристики СКЗ [14]. Отметим, что рост значений коэффициента k соответствует сужению упомянутой характеристики, и наоборот.
В подразд. 4.2.2 показано, что для усреднения возведенного в квадрат сигнала используется интегратор (например, в виде простой RC-схемы). Сигналы x(t) и y(t) соответственно на входе и на выходе такого устройства связаны друг с другом уравнением
|
= k |
|
. |
|
y (t ) |
x2 (t ) |
(4.12) |
В уравнениях (4.11) и (4.12) предполагалось, что коэффициент k принимает определенное значение, т.е. что k является постоянной. Однако в конструкции прибора, содержащего детектор (процедура возведения в квадрат) и интегратор (процедура усреднения), можно предусмотреть контур обратной связи, в результате применения которого коэффициент k становится переменной, пропорциональной обратной величине уровня выходного сигнала. Обозначив модифицированный выходной сигнал y'(t), для k можно написать выражение
k = |
kl |
, |
(4.13) |
|
|||
|
y′(t) |
|
|
где kх – постоянная и y'(t) – временная функция, медленные изменения которой связаны с используемой постоянной времени (временем усреднения).
Подстановкой выражения (4.13) в уравнение, аналогичное уравнению (4.12), получается
y '(t ) = yk'(1t ) x2 (t ),
|
{y '(t )}2 |
= k1 |
|
|
, |
|
|
или |
x2 (t ) |
|
|||||
|
y '(t ) = |
k1 |
|
. |
|
||
|
x2 (t) |
(4.14) |
|||||
88
Анализ выражения (4.14) показывает, что результат извлечения квадратного корня из сигнала является аппроксимация СКЗ сигнала x(t). Можно показать, что большим СКЗ соответствуют малые значения k и большие параболы (см. рис. 4.11).
Отметим, что используемый детектором Вармана метод извлечения квадратного корня и основные принципы работы этого детектора подробно описаны C.G. Wahrman и J.T. Broch.
Напряжение сигнала на выходе логарифмического среднеквадратичного детектора непосредственно пропорционально логарифму СКЗ. Сигнал, пропорциональный СКЗ, получается путем деления на два и антилогарифмического преобразования упомянутого выше выходного сигнала.
4.2.4. Логарифмическое преобразование
Результат обработки волнового сигнала особенно для исследования акустических шумов (акустического поля) после прохождения через детектор его уровень (СКЗ по полосам или суммарный) требуется отображать уровень в децибеловой шкале (дБ), т.е. результирующий сигнал должен изменяться по логарифмическому закону. Логарифмический среднеквадратичный детектор отдает именно такой сигнал, а на выходе детекторов другой конструкции можно предусмотреть электронный линейно-логарифмический преобразователь. Отметим, что соответствующее преобразование также можно осуществить при помощи самописца уровня, снабженного логарифмическим потенциометром.
Для измерения СКЗ вибрационного сигнала логарифмические преобразователи практически не применяются. Используется подобная шкала, позволяющая преобразовывать уровень СКЗ в микрометровую шкалу для виброперемещений, для виброскорости – в шкалу виброскорости (мм/с), для виброускорения – в шкалу виброускорения (мкм/с2). В зависимости от датчика измерения вибраций измеряемый сигнал проходит процедуру интегрирования или дифференцирования.
4.2.5. Временная характеристика детектора
Конечное время отклика детектора является причиной погрешностей (временной задержки, смещения и ошибок при определении присущих максимумам и минимумам значений) при анализе с разверткой частоты (рис. 4.19). Кроме того, временная характеристика детектора (в частности, детектора с интегратором в виде простой RС-схемы) ограничивает крутизну наклона поддающихся обработке спектров. Эти соответствующие результаты обработки проведены на рис. 4.20 и 4.21.
Используя зависимости, приведенные на рис. 4.19, можно оценить погрешности присущих максимумам и минимумам спектров значений при текущем линейном усреднении и при экспоненциальном усреднении с помощью простой RС-схемы.
89
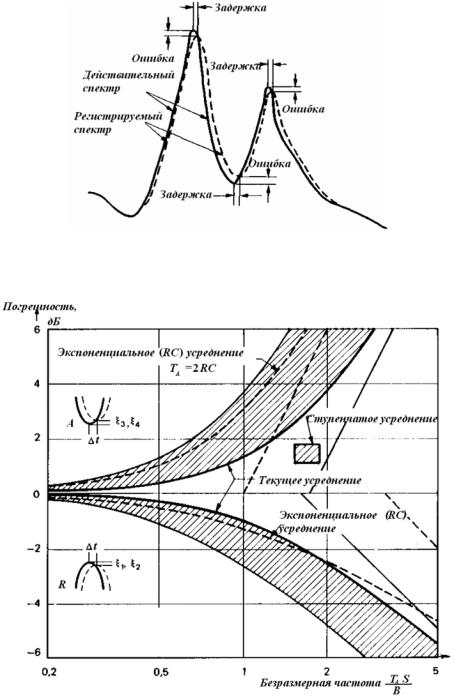
Рис. 4.19. Систематические погрешности (временная задержка и погрешность определения присущих максимумам и минимумам значений) при анализе с разверткой частоты
Рис. 4.20. Погрешности определения присущих максимумам и минимумам спектров значений при текущем линейном и экспоненциальном (КС) усреднении (S – скорость развертки, Гц/с; T – время усреднения, с; В – ширина полосы, Гц)
90