

Виброакустическая диагностика технических объектов
..pdfИстинное физическое перемещение в любой точке всегда является комбинацией всех мод колебаний конструкции. При гармоническом возбуждении, близком к модальной частоте, 95 % перемещений может быть связано с соответствующей конкретной формой мод, а при случайном возбуждении имеется тенденция к произвольной комбинации всех форм мод.
В любом случае форма мод представляет собой внутреннее динамическое свойство совершающей «свободные» механические колебания (без воздействия внешних сил) конструкции. Она отображает относительное перемещение всех частей конструкции для конкретной моды.
Формы мод являются непрерывными функциями, которые при анализе выделяются с «пространственным разрешением», зависящим от числа учитываемых степеней свободы. В общем случае они не замеряются непосредственно, а определяются по набору присущих заданным степеням свободы частотных характеристик. Выделенная форма мод представляется с помощью вектора формы мод {ψ}r, где r – номер моды.
Составляющие ψir вектора формы мод представляют собой относительные перемещения, присущие отдельным степеням свободы (i). Обычно они являются комплексными числами, отображающими как амплитуду, так и фазу перемещения, и носят название модальных перемещений.
Моды колебаний могут быть подразделены на два класса: нормальные и комплексные.
Нормальные моды характерны тем, что все части конструкции перемещаются в фазе или в противофазе (со сдвигом 180°) по отношению друг к другу. Поэтому модальные перемещения ψir представляют собой действительные величины, принимающие положительные или отрицательные значения. Нормальные моды можно рассматривать как стоячие волны с неподвижными узловыми линиями (рис. 2.10).
Рис. 2.10. Нормальная мода
41

Комплексные моды могут иметь какое угодно соотношение между фазами в различных частях конструкции. Модальные перемещения ψir представляют собой комплексные величины, и они могут иметь любое значение фазы. Формы комплексных мод могут рассматриваться как распространяющиеся волны без стационарных узловых линий (рис. 2.11).
Рис. 2.11. Комплексная мода
Распределение затухания в конструкции определяет наличие нормальных или комплексных мод. Когда конструкция имеет очень малое затухание или затухание вообще отсутствует, моды будут нормальными. Если затухание распределено так же, как инерция и жесткость (пропорциональное затухание), можно ожидать наличие нормальных мод.
Конструкции с локализованным затуханием, такие как кузова автомобилей, с точечной сваркой и амортизаторами, имеют комплексные моды.
Формы мод, определенные по небольшому количеству замеров, могут указывать на комплексные моды в конструкциях, в которых имеются лишь нормальные моды.
Связь вычетов и форм мод при модальной частоте (ωdr) модуль частотной характеристики определяется выражением
Hij (ω) ≈ Rijr / σr . |
(2.23) |
Можно показать, что присущий конкретной моде (r) вычет пропорционален произведению модальных перемещений ψir (соответствует степени свободы реакции) и ψjr (соответствует степени свободы силы возбуждения):
Rijr ψir ψ jr . |
(2.24) |
Модальная связь представляет собой общее понятие, указывающее на то, насколько сильно на реакцию при одной модальной частоте оказывают
42
влияния другие моды колебаний. Эту связь можно наблюдать на построенной кривой частотной характеристики вблизи модальной частоты.
Моды колебаний конструкции со слабым затуханием четко отделены друг от друга, другими словами, они слабо связаны. Такие системы ведут себя как системы с одной степенью свободы вблизи модальных частот, а соответствующие конструкции получили названия простых.
При исследованиях подобных конструкций простые методы дают достоверные результаты. Простые конструкции часто встречаются при проведении поиска неисправностей, так как в большинстве случаев проблемы с шумом, механическими колебаниями и усталостью связаны с мало демпфированными резонансами.
Частотные характеристики конструкций с сильным затуханием или высокой модальной плотностью не указывают на четко разделенные моды. При этом говорят, что моды сильно связаны, а реакция при любой частоте представляет собой комбинацию многих мод. Сложные конструкции могут быть все-таки описаны с помощью дискретного набора мод, но методы, необходимые для определения модальных параметров, более сложные.
При рассмотрении понятия высокой модальной плотности и сильного затухания надо понимать, что ни один из этих двух факторов не мешает применению к конструкции модального описания. Они только усложняют используемые методы.
Необходимо предположить, что исследуемые системы имеют линейные свойства, т.е. что реакция всегда пропорциональна силе возбуждения. Это предположение имеет три следствия дляизмерений частотных характеристик:
1.Наложение. Измеряемые частотные характеристики не зависят от типа и формы волны возбуждения. Возбуждение синусоидальной силой с разверткой частоты дает те же результаты, что и возбуждение широкополосной случайной силой.
2.Однородность. Измеряемые частотные характеристики не зависят от уровня возбуждения.
3.Взаимность. В линейной механической системе существует частная симметрия, которая описывается теоремой взаимности Максвелла. Отсюда следует, что измеряемые частотные характеристики не зависят от того, какая точка используется для возбуждения, а какая – для измерения реакции.
2.2.3. Определение передаточной функции
Распространение виброакустических волн в агрегате можно рассматривать как взаимодействие вязкоупругих элементов, которое можно описать, как распространение упругой волны по ним [5]. В общем случае элементы связаны между собой силами. Поэтому простейшей моделью такой среды может служить цепочка грузов с массами и пружинами, связывающими их между собой (рис. 2.12).
43
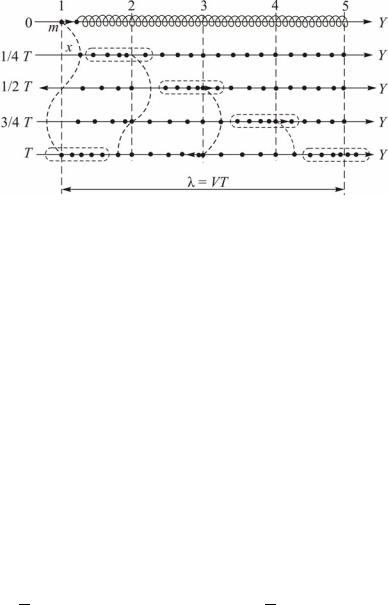
Рис. 2.12. Модель среды распространения упругих волн
В начальный момент все частицы находятся на равных расстояниях друг от друга. Если теперь привести в движение первую частицу в направлении Y на величину X1, то сожмется первая пружина, и сжатие будет распространяться снекоторой скоростью υ вдоль всей системы. Этот процесс называют волной. За время, когда первая масса совершит полный цикл колебания (T), сжатие распространится на расстояние, называемое длиной волны λ = VT. В рассматриваемом случае отдельные частицы смещаются вдоль направления распространения волн, поэтому такая волна называется продольной в отличие от поперечной, где частицыколеблются перпендикулярно направлению распространения.
Продольные волны распространяются в жидкостях, газах и твердых телах, поперечные – в основном в твердых телах. Волны одной частоты по аналогии со световыми называют монохроматическими или гармоническими. Источником волны может служить любое тело, колеблющееся в упругой среде. В зависимости от формы поверхности этого тела и характера его колебаний волна может быть сферической (точечный источник), плоской или цилиндрической. Уравнение смещения частиц в плоской гармонической волне может быть получено из уравнения гармонических колебаний с учетом запаздывания колебаний точек, отстоящих на расстояние у от источника, на
время τ3 = υy ; тогда x = Asin ω(τ − τ3 ) = Asin ω(τ − υy ) . Так как здесь x – функ-
ция двух переменных: времени и координаты y, то можно графически изобразить волну, взяв одну из этих величин постоянной. Если принять т = const, то график x = ψ(y) покажет, как смещены точки с различными координатами в данный момент (мгновенная фотография волны) (рис. 2.13, а).
При y = const график уравнения x = ψ (τ) покажет, как во времени колеблется выбранная нами точка с координатой у (рис. 2.13, б).
44

Рис. 2.13. Графики волны: а – при τ = const; б – при y = const
Скорость распространения продольных волн (скорость звука) зависит от физических свойств среды, например, в воздухе 330 м/с (при t = 0 °С), в воде 1500 м/с (при 25 °С), в стали 5000 м/с. Для других сред скорость звука
может быть рассчитана по формулам: в газах υ = γ |
RT |
= |
γ |
P |
; в жидкостях |
|||||
|
ρ |
|||||||||
|
|
|
|
µ |
|
|
|
|||
υ = |
1 |
; в твердых телах υ = |
E |
, где γ – отношение удельных теплоем- |
||||||
χ ρ |
ρ |
|||||||||
|
|
|
|
|
|
|
|
|||
костей газов, γ = cρ (для воздуха равное 1,4); R – универсальная газовая по- cυ
стоянная, R = 8300 Дж/(кг·моль·град); T – абсолютная температура, K; Т = t + + 273 °С; µ – молекулярный вес, кг/моль; χ – коэффициент сжимаемости, м/Н2; ρ – плотность, кг/м3; E – модуль Юнга, Н/м2.
В общем виде любая среда преобразовывает (вносит свои изменения) проходящую через нее виброакустическую волну (рис. 2.14).
Хi (t) |
Yi (t) |
W(ω)
Рис. 2.14. Схема преобразования вибрационной волны
Следовательно, зная характеристику входящего в волнопровод колебания и выходящего из него, можно оценить влияние волнопровода через передаточную функцию. В соответствии с определением, передаточная функция – это отношение выходного сигнала к входному сигналу:
W (ω) = Yi (t) / Хi (t).
Передаточная функция при проведении модального анализа строится во всем частотном диапазоне объекта и будет определяться спектральной плотностью ее распределения. Характер спектрального распределения не будет зависеть от объекта, если его характеристики являются постоянными. При наличии большого количества элементов объекта существенную роль в изменении характеристики спектральной плотности передаточной
45
функции будут играть границы и зоны нагружения импульсной нагрузкой исследуемых элементов объекта. Это существенно при проведении диагностирования объекта – знание влияния перехода или границы контактной зоны.
При рассмотрении передаточной функции корпус – деталь и деталь – элемент исследовательский процесс строится в частотном диапазоне собственных частот каждого из элементов объекта.
Для диагностирования знание передаточной функции позволит существенно повысить распознавание технического состояния диагностируемого технического или иного объекта.
Основной подход в описании алгоритма математического определения передаточной функции строится на преобразованиях линейной системой стационарной случайной функции. Полагая, что на входе в систему стационарная случайная функция описывается дифференциальным уравнением n-й степени типа, на выходе – дифференциальным уравнением m-й степени. Математическое ожидание, дисперсия и коэффициент корреляции данных уравнений входа и уравнения выхода будут связаны между собой передаточной функцией линейной системы.
2.2.4. Структура импульсного воздействия
При проведении модального анализа в качестве возбуждающего сигнала используется импульс, так как для твердых (а при некоторых условиях и в жидких, и газообразных) объектов свойственно преобразование в собственные гармонические затухающие колебания. При этом параметры отклика на импульсное воздействие определяются двумя взаимно независимыми факторами – свойствами возбуждаемых импульсным воздействием колебательных систем и параметрами самого импульсного воздействия.
Важнейшей импульсной функцией при рассмотрении спектральновременных преобразований является δ-функция – сигнал прямоугольной формы, длительностью ti и амплитудой Umax (рис. 2.15) при следующем условии:
Umaxti = 1 при τ → 0 .
δ -функция имеет бесконечно большую величину амплитуды при бесконечно малом значении длительности. Сразу оговоримся, что δ-функция является математической абстракцией, не реализуемой на практике. Создание воздействия с амплитудой, равной бесконечности, энергетически невозможно, а при стремлении к ней вызвало бы разрушение объекта исследования. Но с информативных позиций значение δ-функции очень велико.
46

Рис. 2.15. Временное изображение |
Рис. 2.16. |
Спектральное изображение |
δ-функции |
δ-функции |
|
Спектральное изображение δ-функции (рис. 2.16) представляет собой горизонтальную линию A =1. В сигнале содержатся составляющие, имеющие абсолютно все частоты и все фазовые соотношения между этими составляющими. Формально математически это действительно так, но для восприятия физического смысла спектрального изображения δ-функции представляется удобным другой подход. Постоянство плотности спектра во всем частотном диапазоне свидетельствует о том, что подобного рода сигнал с одинаковой эффективностью возбудил бы колебательную систему с любой собственной частотой. Сигнал прямоугольной формы, имеющий конечную длительность τ , имеет спектр, подобный показанному на рис. 2.17. Такой сигнал может возбудить колебательные системы, имеющие различные частоты, далеко не с одинаковой эффективностью, и эффективность эта падает с частотой тем быстрее, чем больше длительность импульса ti.
Рис. 2.17. Спектр сигнала прямоугольной формы, имеющий конечную длительность ti
Если интересующий нас диапазон частот не превышает ∆fn (см.
рис. 2.17), при том, что плотность спектра прямоугольного импульса в этом диапазоне изменяется в допустимых пределах, мы имеем право относиться
47
к такому импульсному воздействию, как к δ-функции. При анализе результата импульсного возбуждения колебательной системы мы в этом случае можем не учитывать параметры воздействия, считая его бесконечно коротким независимо от действительного значения ti. Смысл того, что спектр прямоугольного импульса на частотах, равных величинам n / ti (где n – любое це-
лое число), обращается в нуль, станет понятным из следующего рассуждения. Если объектом воздействия является колебательная система, собственная частота которой равна 1/ti, то получается, что если фронт прямоугольного импульса эту систему возбуждает, то спад его (задний фронт) через время, равное периоду этой частоты, воздействует на эту же колебательную систему в противофазе, в результате чего возникшие было колебания прекратятся. Иначе говоря, при ti = 1 f (0) колебательная система данным прямоугольным
f (0) колебательная система данным прямоугольным
импульсом возбуждена не будет. Этот эффект легко наблюдать при возбуждении прямоугольным электрическим импульсом единичного L-C-контура
ссосредоточенными параметрами.
Вотличие от электрического, акустическое воздействие в виде прямоугольного импульса осуществить крайне сложно. Более того, обычно не представляется возможным выяснить истинную форму импульсного воздействия. Однако независимо от формы импульса увеличение длительности
ударного взаимодействия t1 сопровождается уменьшением полосы частот ∆f , в которой этот импульс может достаточно эффективно возбудить коле-
бательную систему. При этом спектр импульсного воздействия, не имеющего крутых фронтов, нигде не имеет значения, равного нулю. Соотношение между τу и ∆f на уровне, достаточном для качественной оценки возможностей
импульсного воздействия выглядит следующим образом:
t1 ≈ 1 / ∆f . |
(2.25) |
Строго говоря, любое импульсное воздействие имеет бесконечный спектр. А выражение (2.25) характеризует ту полосу частот ∆f , в которой возбуждение
некоторой колебательной системы с помощью импульса заданной длительности энергетически целесообразно. За пределами этой полосы амплитуда колебаний возбуждаемой колебательной системы будет незначительной.
Сила, действующая на единицу площади поперечного сечения, называется напряжением:
σ = |
F |
. |
(2.26) |
|
|||
|
S |
|
|
Английский физик Р. Гук экспериментально установил, что для малых деформаций относительное удлинение (перемещение) ε и напряжение σ прямо пропорциональны друг другу:
48

σ = Eε , |
(2.27) |
||
где коэффициент пропорциональности E называется модулем Юнга. |
|
||
Из формул (2.26) и (2.27) вытекает, что |
|
||
ε = |
F |
. |
(2.28) |
|
|||
|
ES |
|
|
Второй закон Ньютона – основной закон динамики поступательного движения – отвечает на вопрос, как изменяется механическое движение тела под действием приложенных к нему сил:
F = ma = m ∂V .
∂t1
Из формул (2.28) и (2.29) вытекает, что
ε = mV .
ESt1
Для определения амплитуды ускорения используется зависимость
&&ε = 2ε .
t12
Изменение амплитуды описывается формулой
&&ε = &&ε0е−2πf
(2.29)
(2.30)
(2.31)
(2.32)
3.СТРУКТУРА ВИБРАЦИОННОГО СИГНАЛА
3.1.Датчики для измерения виброакустических колебаний объекта
3.1.1. Математическая модель вибродатчика
Практически всегда первичный преобразователь исходного колебательного движения в электрический сигнал измеряет только один параметр, и переход к другому параметру осуществляется путем дифференцирования либо интегрирования измеряемого сигнала аппаратурными средствами или расчетными методами.
Вибродатчик инерционного действия, сейсмический датчик – это датчик на основе механической системы второго порядка (масса–пружина), в котором смещение массы относительно корпуса датчика пропорционально измеряемому параметру вибрации.
49
Уравнение движения вибродатчика инерционного действия имеет вид
&& |
& |
(3.1) |
Mx(t) + hx(t) + kx(t) = −MS (t) , |
||
где M – масса инерционного элемента; h – коэффициент демпфирования; k – коэффициент упругости; x – относительное перемещение массы; S(t) – виброперемещение объекта контроля.
Взависимости от расположения области рабочих частот датчика относительно резонансной различают три режима его работы: режимы измерения виброперемещения, виброскорости и виброускорения.
Врежиме измерения виброперемещения датчик работает в области час-
тот, лежащих выше собственной частоты датчика.
Врежиме измерения виброскорости датчик работает в области частот,
лежащих в области задемпфированной собственной частоты датчика.
Врежиме измерения виброускорения датчик работает в области частот,
лежащих ниже собственной частоты датчика.
Кинематический принцип измерения вибрации заключается в измерении параметров вибрации исследуемого объекта относительно какого-либо другого объекта, принятого за неподвижный.
Динамический принцип измерения вибрации заключается в создании
вдатчике, воспринимающем вибрацию, искусственной неподвижной точки, относительно которой измеряются параметры вибрации исследуемого объекта.
Динамический принцип измерения реализуется в вибродатчиках инерционного действия, в которых инерционная масса и упругий элемент, соединяющий массу с основанием датчика, крепятся на объекте контроля, причем
всилу инерционности масса отстает от колебаний объекта и, начиная с некоторой частоты, остается неподвижной в пространстве, позволяя измерять абсолютную вибрацию объекта.
3.1.2. Акселерометр
Пьезоэлектрический акселерометр – это датчик ускорения, в котором сейсмическая масса закреплена на пьезоэлементе или прижата к нему. Пьезоэлемент создает электрический заряд, пропорциональный инерционной силе и, следовательно, перемещению сейсмической массы.
Пьезоакселерометры на сегодняшний день являются стандартными датчиками, применяемыми для измерений вибраций машин (рис. 3.1). Они могут иметь различные конструкции [12]. Нагляднее всего принцип их действия можно описать на примере компрессионной конструкции (рис. 3.2). Сейсмическая масса крепится к основанию осевым болтом, который прижимает кольцевую пружину. Между массой и основанием вставляется пьезоэлемент. При перемещении акселерометра вверх или вниз на сейсмическую
50