

Математические модели движения транспортных средств
..pdfСуществуют три типа маневров транспортных средств на пере- |
|||
крестках: пересечение, слияние и разветвление потоков. |
|||
Маневр |
|
Обозначение маневра |
|
Отклонение |
|
|
|
Вправо |
Влево |
Взаимное |
Многократное |
Слияние |
|
|
|
Справа |
Слева |
Взаимное |
Многократное |
Пересечение |
|
|
|
Справа |
Слева |
Попутное |
Встречное |
Рис. 3.1. Классификация маневров и их обозначения |
|||
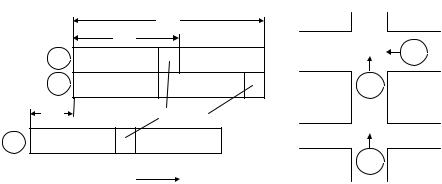
Исследования дорожно-транспортных происшествий показывают, что наибольшее их число происходит в так называемых конфликтных точках, т.е. в местах, где в одном уровне пересекаются траектории движения транспортных средств или транспортных средств и пешеходов, а также в местах отклонения или слияния транспортных потоков (рис. 3.1). Наиболее часто такое взаимодействие участников дорожного движения возникает на пересечениях дорог, где встречаются потоки различных направлений (рис. 3.2). Вместе с тем часть конфликтов происходит и на перегонах дорог при перестроениях автомобилей в рядах (маневрировании) и при переходе проезжей части пешеходами вне перекрестков.
41

|
|
1 |
|
2 |
|
|
|
1 |
|
2 |
|
|
|
|
|
|
|
|
3 |
3 |
3 |
3 |
|
2 |
2 |
|
|
1 |
1 |
|
3 |
|
3 |
3 |
|
|
|
|
|
|
|
|
3 |
3 |
3 |
3 |
|
|
|
3 |
|
||
|
1 |
|
2 |
2 |
|
|
|
|
|||
1 |
3 |
3 |
3 |
3 |
|
|
|
2 |
|
1 |
|
|
|
|
|
|
2 |
1 |
|
Рис. 3.2. Конфликтные точки на пересечении двухполосных дорог: 1 – отклонения; 2 – слияния; 3 – пересечения
Таким образом, появляется возможность оценивать потенциальную опасность тех или иных участков уличной дорожной сети по числу конфликтных точек. Их анализ позволяет также сравнивать между собой различные варианты схем организации движения.
3.2. Определение сложности и опасности перекрёстка
Существуют различные подходы к количественной оценке каждой конфликтной точки и их совокупности. Простейшая методика пятибалльной системы оценки узла исходит из того, что точка отклонения оценивается одним условным баллом, слияния – тремя и пересечения – пятью баллами. Сложность (условная опасность) любого пересечения определяется следующим образом:
42
m = n0 + 3nc + 5nп, |
(3.1) |
где no, nc и nп – число точек соответственно отклонения, слияния и пересечения транспортных потоков.
Рассматриваемое типичное пересечение имеет условный показатель сложности 112 баллов. Принято считать узел (перекресток) малой сложности (простым) при т < 40, средней сложности при
т= 40…80, сложным при т = 80…150 и очень сложным при
т> 150.
На реальном нерегулируемом пересечении число конфликтных точек определяют с учетом числа полос движения по каждому направлению и разрешенных направлений движения. На четырехстороннем перекрестке дорог со всеми разрешенными маневрами для однорядных потоков транспортных средств встречного направления (см. рис. 3.2) можно выявить 32 типичные конфликтные точки, в числе которых 16 точек пересечения и по 8 – отклонения и слияния.
Взаимодействие транспортных средств на дорогах является сложным явлением, и упрощенные оценки соответствующих конфликтных точек позволяют лишь приблизительно представить себе сложность того или иного транспортного узла. Реальная опасность конфликтующих потоков, условия видимости для водителей, состояние покрытия проезжей части дороги, траектория, по которой совершается маневр, и др.
Примером анализа степени опасности нерегулируемого пересечения с учетом интенсивности конфликтующих потоков является метод, в соответствии с которым для каждой конфликтной точки (без разделения их по типам) определяется максимально возможное число столкновений. Оно равно меньшему из значений числа автомобилей в час для двух конфликтующих потоков. Так, для пересечения, показанного на рис. 3.3, число конфликтов составляет в точке I – 100, II – 50, III – 50, IV – 200, V – 50. Сумма, таким образом, составляет 450 возможных конфликтов в час. С помощью этой методики можно сравнивать условное изменение ситуации в узле при изменении разрешенных направлений, отводе части транспортного потока или его
43

полном запрещении. Десятибалльная система оценки конфликтных точек дает возможность более детально анализировать их на любом участке улично-дорожной сети, в частности, учитывать угол встречи при возможном конфликте и такой специфический случай, как встречное движение по одной полосе. Такая ситуация может возникнуть, например, при закрытии на ремонт одной половины двухполосной проезжей части дороги или моста.
250 |
V 50 |
|
|
200 |
450 |
IV |
III |
I |
35 |
|
200 |
50 |
100 |
|
|
|
|
|
50 |
II |
|
200 150
Рис. 3.3. Схема для расчета максимально возможного числа конфликтов на перекрестке
При анализе степени опасности узла по десятибалльной системе конфликтные точки оцениваются следующими условными баллами (коэффициентами опасности) (табл. 3.1).
Таблица 3.1
Условные баллы оценки конфликтных точек
|
Отклонения |
Слияния |
|
Пересечения под углом, град |
|
|||||
|
30 |
|
60 |
90 |
120 |
150 |
|
180 |
||
|
|
|
|
|
|
|
|
|
|
|
Баллы |
1 |
2 |
3 |
|
4 |
6 |
7 |
9 |
|
10 |
44
Значения коэффициентов опасности для промежуточных значений углов пересечения можно определять интерполяцией. Кроме названных трех наиболее характерных маневров при рассмотрении схем и траекторий движения транспортных средств часто выделяют также маневр переплетения. Он характерен для перестроения в рядах движения, в частности, на развязках с круговым движением. По существу, переплетение – это сочетание двух маневров: слияния и последующего отклонения потоков.
Так как возможность столкновений возрастает с увеличением интенсивности конфликтующих потоков, для оценки опасности вводятся индексы интенсивностей σN,
σN = 0,01 (N′+ N′′), |
(3.2) |
где N′ и N′′ – интенсивности конфликтующих потоков в абсолютных (физических) единицах (авт/ч).
Показатель опасности т′ рассчитывается как сумма условных баллов:
k |
l |
p |
|
m′ = ∑nоσо + ∑3nсσс +∑5nпσп, |
(3.3) |
||
1 |
1 |
1 |
|
где индексы k, l и p – числа конфликтных точек отклонений, слияний и пересечений на данном перекрёстке; σо, σс, σп – соответствующие им индексы интенсивностей.
3.3. Круговое движение на пересечениях
Одним из способов сокращения числа конфликтных точек является переход к одностороннему движению, главное достоинство которого состоит в устранении конфликта встречных транспортных потоков, поскольку конфликтные точки встречного движения являются наиболее опасными. Особенно ощутимо сокращается число конфликтных точек на пересечениях. К преимуществам одностороннего движения следует также отнести:
45
•возможности более рационального использования полос проезжей части и осуществления принципа выравнивания состава потоков на каждой из них (специализация полос);
•резкое улучшение условий координации светофорного регулирования между пересечениями;
• облегчение условий перехода пешеходами проезжей части в результате четкого координированного регулирования и упрощения их ориентировки, так как нет встречного транспортного потока;
• повышение безопасности движения в темное время вследствие ликвидации ослепления водителей светом фар встречных транспортных средств.
Развитием метода организации одностороннего движения на перегонах улиц и дорог применительно к перекресткам и городским площадям является введение на них кругового движения. При этом главным результатом является ликвидация конфликтных точек пересечения и конфликта встречных потоков. Вторым положительным фактором является воздействие на водителя центробежной силы при движении по круговой траектории, в результате чего он автоматически снижает скорость. На правильно спроектированных развязках такого типа скорость свободного движения легковых автомобилей составляет 40–45 км/ч (не более), что обеспечивает высокую степень вероятности ликвидировать любую конфликтную ситуацию. Высокая безопасность на развязках кругового типа (которые применяются как в городских условиях, так и на автомобильных дорогах) подтверждается отечественной и зарубежной статистикой дорожнотранспортных происшествий.
Принципиальная схема полноценного кругового движения показана на рис. 3.4 на примере 4-лучевой развязки с симметричным расположением входящих дорог. Такая развязка присуща прямоугольной сетке уличной дорожной сети. Однако в реальных условиях, особенно при радиальной схеме сходящихся дорог (в старых городах), симметричное их расположение не обеспечивается. Это ухудшает условия движения вследствие сокращения длины участков перестроения.
46

1 |
|
2 |
|
2 |
|
|
1 |
|
4 |
|
2 |
1 |
|
|
|
|
|
|
|
2 |
|
1 |
3 |
|
|
|
Рис. 3.4. Принципиальная схема кругового движения: 1 и 2 – соответственно точки слияния и отклонения; 3 – участок перестроения; 4 – центральный островок
В ряде случаев применяются прямоугольные и эллиптические островки, что естественно уменьшает возможность снижения скорости за счет воздействия на водителя боковой силы.
Самой крупной кольцевой развязкой с круглым островком является площадь генерала Де Голля в Париже. Она обслуживает 12 сходящихся дорог и имеет центральный островок диаметром около 90 м. Весьма положительным и упрощающим ситуацию на многолучевых развязках является применение одностороннего движения на некоторых входах и выходах. Это сокращает число конфликтных точек.
3.4. Управляющие параметры светофорной сигнализации
Целью светофорного регулирования на перекрестке является обеспечение безопасности движения. Автомобили, прибывающие к регулируемому перекрестку за время действия красного сигнала, должны ожидать включения зеленого сигнала. Кроме того, они так-
47
же задерживаются в процессе трогания с места. Отсюда очевидно, что снижение пропускной способности перекрестка является неизбежным.
Светофорная сигнализация управляет потоком автомобилей с помощью зеленого, желтого и красного сигналов практически во всех странах мира. Типичным методом управления светофорной сигнализацией является переключение сигналов с помощью постоянно-
го цикла регулирования или жесткое однопрограммное управление.
При этом управляющем алгоритме длительности горения зеленого, желтого и красного сигналов являются постоянными и повторяющимися от цикла к циклу.
Параметрами жесткого однопрограммного управления являются
(рис. 3.5):
• длительность цикла регулирования Т: повторяющийся период работы светофорного сигнала;
|
|
|
T |
|
|
|
G |
|
2 |
|
1 |
Зеленый |
Красный |
|
|
|
|||
|
2 |
Красный |
Зеленый |
1 |
|
D |
|
Желтый |
|
3 |
Зеленый |
Красный |
|
|
|
|
|
Время |
3 |
|
|
|
|
|
|
|
|
а |
б |
Рис. 3.5. Представление сигналов в цикле регулирования;
а– временное; б – пространственное
•распределение длительностей горения сигналов в пределах цикла g: отношение времени горения зеленого сигнала для данного направления движения к длительности цикла регулирования. Определяется для каждого потока, прибывающего к перекрестку (для потока 2 на рис. 3.5, g = G/T). Требуется, чтобы в случае, когда на од-
48
ном направлении движения включен зеленый сигнал, на конфликтующем направлении включался красный;
• сдвиг фаз относительно соседних перекрестков – сдвиг по фазе начала горения зеленого сигнала. Имеются два определения:
а) относительный сдвиг γ – сдвиг по фазе сигналов светофоров на двух соседних перекрестках;
б) абсолютный сдвиг ξ – сдвиг по фазе сигнала каждого светофора относительно заранее заданного сигнала, т.е. заранее определенной точки в цикле регулирования.
Величина сдвига фаз задается отношением разности фаз к длительности цикла регулирования. Например, относительный сдвиг фаз между двумя перекрестками на рис. 3.5 равен D/T.
3.5. Пропускная способность регулируемого перекрестка
Приближенное значение пропускной способности или ее верхняя оценка для транспортного потока, проходящего через перекресток в данном направлении движения, может быть получено путем умножения пропускной способности магистрали на параметр распределения длительности горения сигналов для данного направления. Однако истинное значение пропускной способности меньше, чем полученная таким способом величина, и зависит от длительности цикла.
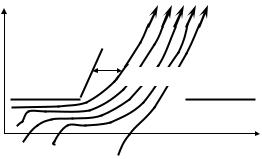
На рис. 3.6 показано движение автомобилей, проходящих через регулируемый перекресток после включения зеленого сигнала светофора. На этом рисунке абсцисса и ордината соответственно определяют время и расстояние, сплошные жирные линии и стрелки – время горения красных сигналов и транспортный поток. Когда лидирующий автомобиль в очереди, образовавшейся за время горения красного сигнала, убывает с перекрестка в начале горения зеленого сигнала, величина его задержки составляет Н0 и определяется реакцией водителя и затратами времени на ускорение автомобиля, как это показано на рис. 3.6. Следующие автомобили начинают движение через интервалы времени Н1…Н2. Хотя величины Hi зависят и от
49
x
Н0 Н1 Н2 Н3 Н4
Красный Красный
t
Рис. 3.6. Отправление автомобилей с перекрестка
наличия автомобилей, поворачивающих направо или налево, их значения, если ограничиться рассмотрением движения только в прямом направлении, примерно соответствуют данным, приведенным на рис. 3.7. Очевидно, что первые два или три автомобиля имеют большие интервалы отправления, в то время как интервалы последующих автомобилей приблизительно постоянны и равны Н. Это явление может быть объяснено временем реакции водителей. Суммарное время этой дополнительной задержки первых двух или трех автомобилей в очереди, включая часть предыдущего периода горения желтого сигнала, называется потерянным временем L. Если G – это длительность горения зеленого сигнала, то максимальное число автомобилей С1, которое может пройти через перекресток по одной полосе движения в одном направлении, определяется формулой
C1 =(G − L)/H , |
(3.4) |
где |
|
L = H0 + H1 + H2 −3H +Y , |
(3.5) |
если в потерянное время мы включим весь период горения желтого сигнала Y.
Пропускная способность С каждой полосы движения регулируемого перекрестка, т.е. максимально возможная интенсивность движения
50