

3.2 Статическая устойчивость в боковом движении
Различают путевую и поперечную статическую устойчивость с фиксированными и освобожденными органами и рычагами управления.
Путевая (флюгерная) статическая устойчивость – это способность ВС, самостоятельно, без вмешательства пилота в управление, противодействовать (уничтожать, ликвидировать) изменению угла скольжения.
О путевой (флюгерной) устойчивости и
неустойчивости судят по знаку частной
производной коэффициента момента
рыскания по углу скольжения
![]() ,
взятой в точке, соответствующей
,
взятой в точке, соответствующей
![]() .
.
При изменении угла скольжения
![]() (рис.25) появляется
(рис.25) появляется
![]() <0,
стремящийся развернуть ВС вправо, т.е.
уменьшить скольжение. На рис. показаны
зависимости
<0,
стремящийся развернуть ВС вправо, т.е.
уменьшить скольжение. На рис. показаны
зависимости
![]() для устойчивого и неустойчивого ВС в
путевом отношении.
для устойчивого и неустойчивого ВС в
путевом отношении.
Частная производная называется степенью путевой статической устойчивости ВС.
При
![]() - устойчивое ВС,
>0-
неустойчивое,
- устойчивое ВС,
>0-
неустойчивое,
![]() -
нейтральное в путевом отношении.
-
нейтральное в путевом отношении.

Поперечная статическая устойчивость
– это способность ВС, самостоятельно
без вмешательства пилота в управление
(противодействовать, уничтожать,
ликвидировать) уменьшать возникший
крен. При возникновении, например,
правого крена появляется правое
скольжение
.
Принимая во внимание зависимость
![]() (см. рис. 26), при
(см. рис. 26), при

возникает момент
![]() ,
который создает
,
который создает
![]() и направлен на уменьшение крена. Это
соответствует случаю, когда при
возникновении скольжения ВС кренится
в сторону отстающего полукрыла.
Производная
характеризует
степень поперечной
и направлен на уменьшение крена. Это
соответствует случаю, когда при
возникновении скольжения ВС кренится
в сторону отстающего полукрыла.
Производная
характеризует
степень поперечной
статической устойчивости ВС.
3.3 Балансировка вс в установившемся боковом движении.
Характеристики поперечной и путевой статической управляемости
Рассмотрим сначала установившийся
(![]() прямолинейный полет с креном и скольжением
(движение при скосе ветром, отказе
двигателей, несимметричной компоновке
ВС и т.д.). Определим проекцию всех сил,
действующих на ВС на OY и
OZ связной системы координат
(см. рис. 27)
прямолинейный полет с креном и скольжением
(движение при скосе ветром, отказе
двигателей, несимметричной компоновке
ВС и т.д.). Определим проекцию всех сил,
действующих на ВС на OY и
OZ связной системы координат
(см. рис. 27)

Из условия равновесия сил по оси OY
имеем:
![]() откуда
откуда
![]() и, тогда
и, тогда
![]() .
.
Из условия равновесия по OZ (с учетом предыдущего соотношения)
![]()
Принимается, что
![]() ,
тогда
,
тогда
![]() ;
;
![]() ,
-
поперечная составляющая тяги двигателей;
i-число двигателей.
,
-
поперечная составляющая тяги двигателей;
i-число двигателей.
Перейдем от сил и моментов к их коэффициентам, для чего разделим силы на qS, а моменты на qSl. Значения коэффициентов моментов приведены в (3.3), (3.4). Условия равновесия боковых моментов и сил примут вид
1.
![]()
2.
![]() (3.5)
(3.5)
3.
![]() ;
;
Здесь:
![]()
Балансировочные значения углов
![]() определяются из системы (3.5) в зависимости
от угла скольжения. Пренебрегая
определяются из системы (3.5) в зависимости
от угла скольжения. Пренебрегая
![]() получим
получим
![]() (3.6)
(3.6)
 (3.7)
(3.7)
![]() (3.8)
(3.8)
Потребные для балансировки отклонения
педалей
![]() и боковые отклонения штурвала (ручки)
и боковые отклонения штурвала (ручки)
![]() равны
равны
![]() (3.9)
(3.9)
где
![]() -
коэффициенты передачи соответственно
для путевого и поперечного управления
ВС;
-
коэффициенты передачи соответственно
для путевого и поперечного управления
ВС;
![]() ,
(3.10)
,
(3.10)
где
![]() вычисляется по формулам (3.7) для случая
фиксированных рычагов управления
(педалей, штурвала).
вычисляется по формулам (3.7) для случая
фиксированных рычагов управления
(педалей, штурвала).
Из выражений (3.6)…(3.9) видно, что с увеличением степени поперечной и путевой статической устойчивости расходы руля направления, элеронов и рычагов управления растут.
Балансировочные значения
![]() можно выразить и в зависимости от угла
крена
можно выразить и в зависимости от угла
крена
![]() .
В этом случае (обозначив
.
В этом случае (обозначив
![]()
![]() (3.11)
(3.11)
где
![]() (3.12)
(3.12)
Так как
![]() ,
то производные
,
то производные
![]() и
и
![]() будут иметь такой же знак как
будут иметь такой же знак как
![]() и
и
![]() .
Значения производных
,
.
Значения производных
,
![]() и
определяются по формулам (3.7), (3.8) и
(3.10).
и
определяются по формулам (3.7), (3.8) и
(3.10).
Лекция 6. 3.31. Усилия на рычагах управления элеронами и рулем направления в прямолинейном установившемся полете со скольжением
Усилия на штурвале (ручке) и педалях, потребные для балансировки ВС с обратимой и необратимой системами управления, можно представить в виде
![]() (3.13)
(3.13)
![]() (3.14)
(3.14)
Отличие для ОБУ и НБУ состоит лишь в том, что в (3.13) и (3.14) производные вычисляются по разному. Так как при НБУ усилия, которые должен прикладывать пилот к рычагам, зависят от характеристики загрузочных механизмов, то эти производные будут иметь вид
![]() (3.15)
(3.15)
![]() (3.16)
(3.16)
где
![]() - градиенты усилий берутся из характеристик
загрузочных механизмов; производные
- градиенты усилий берутся из характеристик
загрузочных механизмов; производные
![]() определяются по формулам (3.7), (3.12) и (3.8)
в которых
и
надо брать для случая с фиксированным
рычагом управления.
определяются по формулам (3.7), (3.12) и (3.8)
в которых
и
надо брать для случая с фиксированным
рычагом управления.
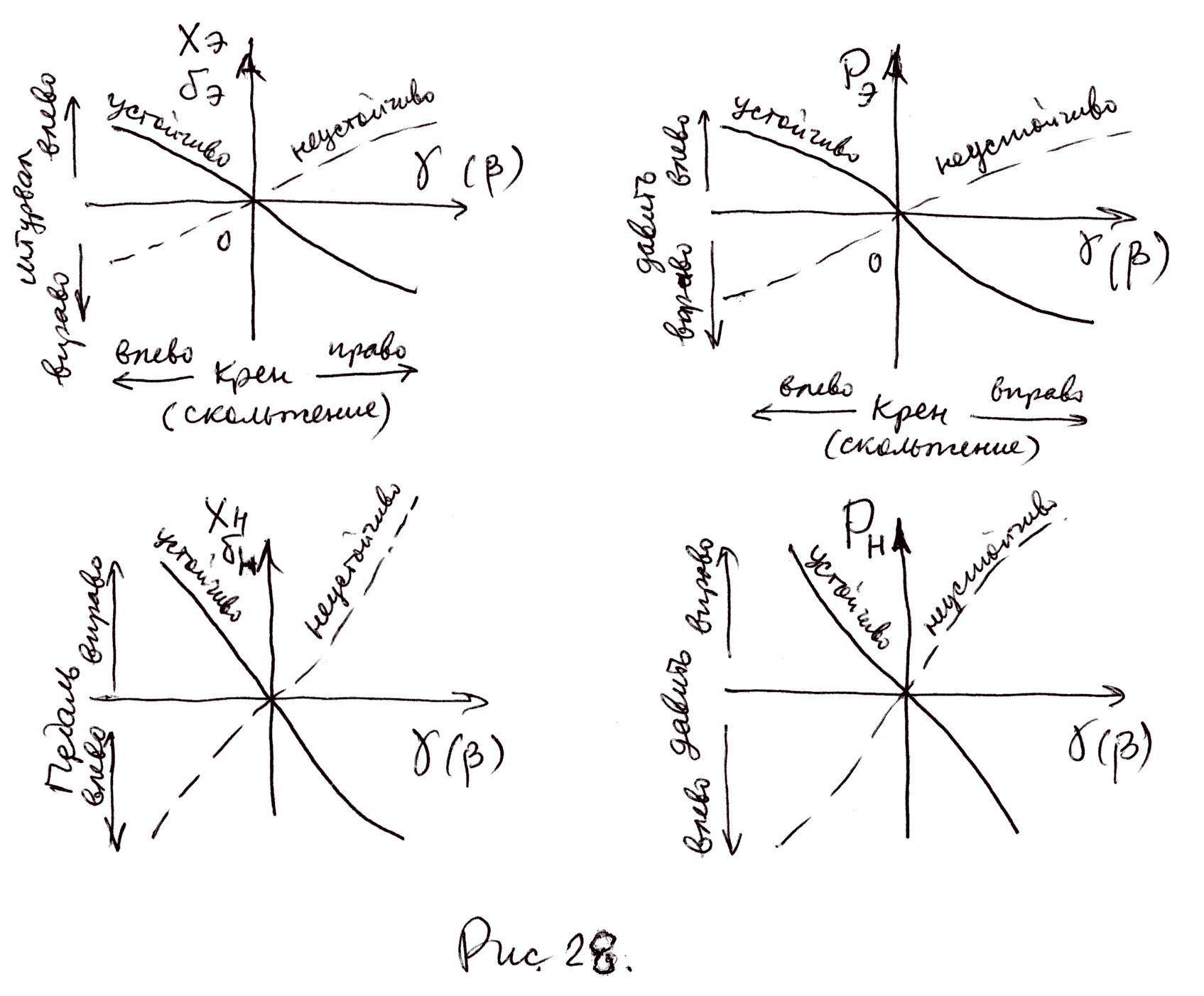
На рис 28 представлены типовые
балансировочные зависимости, статически
устойчивого и статически неустойчивого
в поперечном и путевом отношении ВС
при
![]() неизменных конфигурации ВС и режима
работы двигателей.
неизменных конфигурации ВС и режима
работы двигателей.
Для нормального управления ВС требуется,
чтобы все производные
![]() были отрицательными.
были отрицательными.
Показатели поперечной статической управляемости:
![]() -
называются соответственно коэффициентами
расхода усилий и штурвала (ручки)
управления на крен.
-
называются соответственно коэффициентами
расхода усилий и штурвала (ручки)
управления на крен.
Показатели путевой (флюгерной)
статической управляемости:
![]() -
называются коэффициентами расхода
усилий и педалей на крен.
-
называются коэффициентами расхода
усилий и педалей на крен.
Для того чтобы ВС не было слишком
«тяжелым» или «строгим» в поперечном
и путевом управлении, производные
![]() ,
,![]() ,
,![]() и
и
![]() не должны выходить за допустимые пределы.
не должны выходить за допустимые пределы.
Гармоничность управления достигается за счет пропорциональности перемещений штурвала и педалей , т.е. за счет выбора производной
 (3.17)
(3.17)
где
![]() -
выбираются при фиксированных рычагах
управления, а
-
выбираются при фиксированных рычагах
управления, а
![]() - называют коэффициентом гармоничности
управления, являющимся одним из
показателей статической управляемости.
- называют коэффициентом гармоничности
управления, являющимся одним из
показателей статической управляемости.
Во всем диапазоне
максимальные усилия не должны превышать
физических возможностей пилота
![]() .
.