2.1. Аэродинамический момент тангажа в установившемся прямолинейном полете.
Выделяя основные составляющие, момент
Мz удобно
представить как алгебраическую сумму
аэродинамических моментов тангажа ВС
без ГО
![]() момента ГО
момента ГО![]() (при нейтральном положении органов
управления
(при нейтральном положении органов
управления
![]() )
и управляющих моментов ВС
)
и управляющих моментов ВС![]() :
:
![]()
Второй из перечисленных моментов тангажа
в зависимости от угла установки
стабилизатора -
![]() ,
фактически также является управляющим
и может быть объединен с последним.
,
фактически также является управляющим
и может быть объединен с последним.
Рассмотрим аэродинамический
момент тангажа в установившемся (V=const)
прямолинейном (θ=const)
полете без крена (![]() =0)
и скольжения (β=0).
=0)
и скольжения (β=0).

Для ВС нормальной схемы (см. рис.6),
условно в прямолинейном полете близком
к горизонтальному (Н ≈ const,
![]() )
показаны аэродинамические силы (за
исключением Ха), которые
создают основной момент относительно
ОZ. Подъемная сила всех
частей ВС за исключением ГО
)
показаны аэродинамические силы (за
исключением Ха), которые
создают основной момент относительно
ОZ. Подъемная сила всех
частей ВС за исключением ГО![]() ,
зависящая от угла атаки (кроме
,
зависящая от угла атаки (кроме
![]() )приложена
в фокусе ВС без ГО (обозначен
)приложена
в фокусе ВС без ГО (обозначен
![]() ).
).
Под фокусом по углу атаки будем понимать точку пересечения линии действия полной
аэродинамической силы
![]() зависящей
только от угла атаки, с продольной осью
ВС.
зависящей
только от угла атаки, с продольной осью
ВС.
В частности вместо составляющей полной аэродинамической силы с некоторой погрешностью можно принять составляющую подъемной силы, зависящей от угла атаки.
Если ось OZ поместить
в эту точку и вычислить продольный
момент![]() то
в силу равенства нулю плеча действия
сил, зависящих от
то
в силу равенства нулю плеча действия
сил, зависящих от
![]() ,
производная момента
,
производная момента![]() при
всех осталь-
при
всех осталь-
ных фиксированных параметрах:![]() и
т.д.
и
т.д.
Так же как и аэродинамические силы по принципу суперпозиции складываются из сил,
действующих на отдельные части ВС (крыло, фюзеляж и др.) так и фокус (для краткости «по углу атаки » будем опускать) зависит от фокуса крыла, фюзеляжа и др. Поэтому можно считать, что подъемная сила всех частей ВС без ГО приложена в фокусе всех частей ВС без ГО. При этом полная подъемная сила (для статически устойчивого ВС)
![]()
Здесь отметим, что аналогично можно ввести понятия фокуса по отклонению руля высоты,
закрылков и др. отклоняемых органов управления при малых их отклонениях и фиксированных остальных параметрах (углах).
Аэродинамический момент тангажа ВС запишем в следующем виде
![]()
где
![]()
![]()
Здесь индексами обозначены составляющие
момента тангажа: «кр»- от крыла; «ГО»-от
горизонтального оперения; «ф»- от
фюзеляжа; «![]() »-от
гондол двигателей; «подв»- от различных
подвесок. Можно обозначить Мz
от всех частей кроме ГО как
»-от
гондол двигателей; «подв»- от различных
подвесок. Можно обозначить Мz
от всех частей кроме ГО как
![]() ,
а момент от стабилизатора и руля высоты
,
а момент от стабилизатора и руля высоты
![]() .
.
Из рис.6. видно, что для сбалансированных
режимов полета момент от всех частей
без ГО
<0
(на пикирование) должен уравновешиваться
моментом, создаваемым ГО,
![]() >0
(на кабрирование). При этом результирующая
подъемная сила
>0
(на кабрирование). При этом результирующая
подъемная сила
![]() направляется вниз при отрицательном
отклонении руля высоты
направляется вниз при отрицательном
отклонении руля высоты
![]() <
0 (задняя кромка - вверх) и тогда
суммарная подъемная сила, которая в
основном уравновешивает силу тяжести
<
0 (задняя кромка - вверх) и тогда
суммарная подъемная сила, которая в
основном уравновешивает силу тяжести
![]() (например, в горизонтальном полете)
определяется в виде разности сил
(например, в горизонтальном полете)
определяется в виде разности сил![]() ,
что является невыгодным с точки зрения
создания полной подъемной силы и этот
случай кратко называют «потерей на
балансировку».
,
что является невыгодным с точки зрения
создания полной подъемной силы и этот
случай кратко называют «потерей на
балансировку».
При малых углах атаки, полагая приближенно
![]() и
и
![]() можно записать выражение для момента
тангажа (см. рис. 6)
можно записать выражение для момента
тангажа (см. рис. 6)
![]() ,
(2.1)
,
(2.1)
где:
![]() - момент тангажа ВС без ГО при α = 0;
- момент тангажа ВС без ГО при α = 0;
![]() ;
;
![]() - угол атаки горизонтального оперения,
ε – скос потока в области ГО, приближенно
зависящий от α и Сyaб.г.о.
линейно:
- угол атаки горизонтального оперения,
ε – скос потока в области ГО, приближенно
зависящий от α и Сyaб.г.о.
линейно:
![]() .
.
Подставив это соотношение в выражение для αг.о., получаем (прибавляя и вычитая αоб.г.о.)
![]()
=![]() (2.2)
(2.2)
Преобразуем (2.1), принимая во внимание
(2.2), выражения для
![]() и поделив на qSbA
и поделив на qSbA
![]() ,
(2.3)
,
(2.3)
где:
![]() коэффициент
торможения потока у ГО,
коэффициент
торможения потока у ГО,
![]() ;
;
![]() - относительная площадь ГО;
- относительная площадь ГО;
![]() - относительное плечо ГО;
- относительное плечо ГО;
![]() -
относительный статический момент
площади ГО; полагая малой величину
-
относительный статический момент
площади ГО; полагая малой величину
![]() ,
коэффициент
,
коэффициент
![]() представим
в виде
представим
в виде
![]()
![]() (2.4)
(2.4)
Преобразуем выражение (2.3), учитывая (2.2), (2.4)
 (2.5)
(2.5)
где обозначены:
![]()
![]() ;
;
![]()
![]() -
коэффициент относительной эффективности
руля высоты;
-
коэффициент относительной эффективности
руля высоты;
![]() при
М<1, Sв – площадь
руля высоты.
при
М<1, Sв – площадь
руля высоты.
С целью дальнейшего упрощения выражения
(2.5), установим соотношение между
![]() .
При этом рассмотрим часть подъемной
силы, зависящую только от угла атаки с
учетом (2.2).
.
При этом рассмотрим часть подъемной
силы, зависящую только от угла атаки с
учетом (2.2).
![]()
![]()
Откуда при
![]() ,
получаем
,
получаем
![]() (2.6)
(2.6)
Преобразуем теперь составляющие (2.5), являющиеся множителями при α с учетом предыдущего соотношения
 (2.7)
(2.7)
(с точностью до
![]() в предыдущем соотношении (2.7)).
в предыдущем соотношении (2.7)).
Введем обозначения
 (2.8)
(2.8)
тогда (2.7) преобразуется к виду
![]() (2.9)
(2.9)
и коэффициент момента тангажа (2.5), с учетом (2.9), запишем в новой форме
![]() (2.10)
(2.10)
где обозначены:
![]() (2.11)
(2.11)
![]() (2.12)
(2.12)
Учитывая, что
![]() можно (2.10) записать в другом виде
можно (2.10) записать в другом виде
![]() (2.13)
(2.13)
где
![]() (2.14)
(2.14)
При этом имеется в виду, что
![]() зависит только от α при нулевых
зависит только от α при нулевых
![]() ,
а общая зависимость (в линейном диапазоне
изменения
,
а общая зависимость (в линейном диапазоне
изменения
![]()
![]() )
имеет вид
)
имеет вид
![]() (2.15)
(2.15)
при переменном
![]() .
Если вместо руля высоты используется
управляемый стабилизатор, то надо
принять в (2.13)
.
Если вместо руля высоты используется
управляемый стабилизатор, то надо
принять в (2.13)
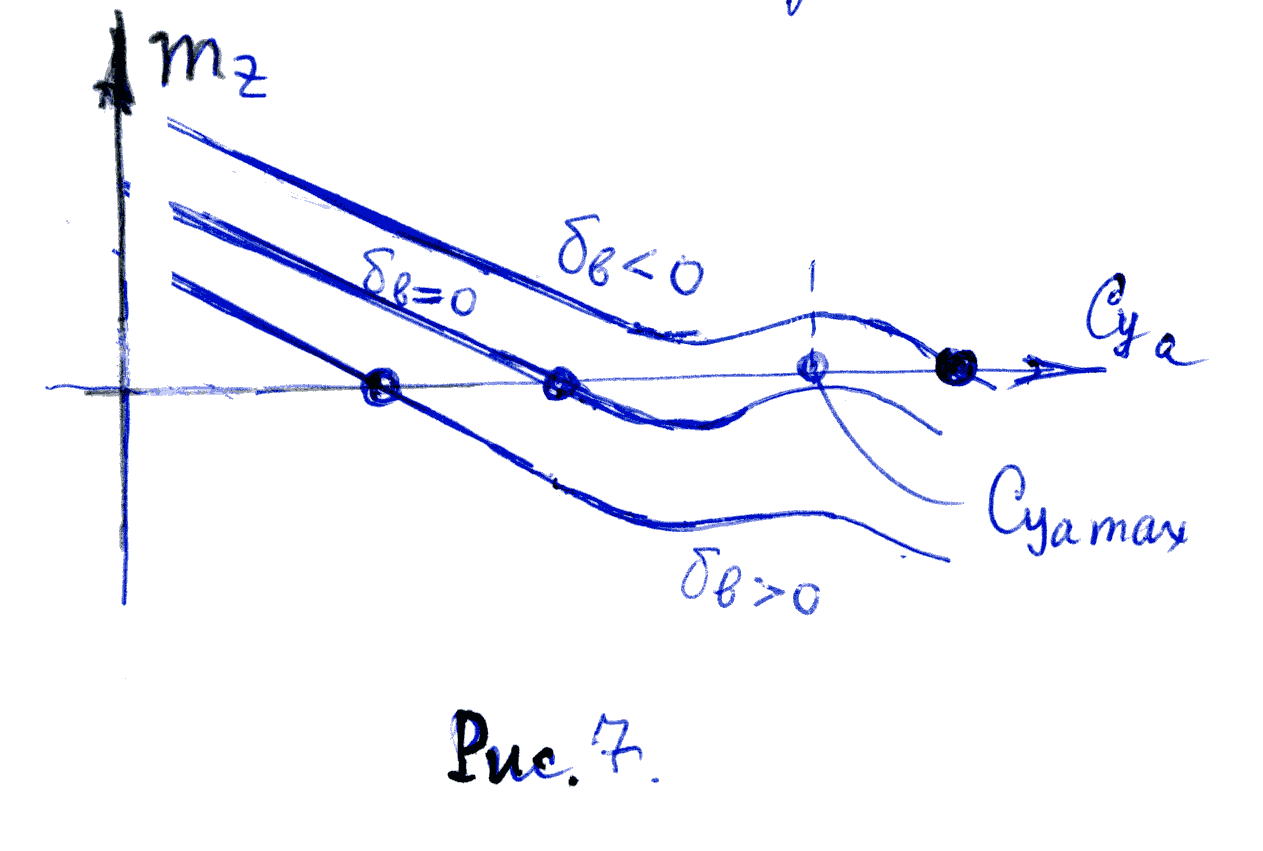
![]() Примерная зависимость (2.13) для ВС
нормальной схемы при М=const;
Примерная зависимость (2.13) для ВС
нормальной схемы при М=const;
![]() имеет вид
имеет вид