

(Начальное условие (н.У.)),
где y-n-мерный
фазовый вектор, u-m-мерный
вектор управления, f(·)
– вещественная непрерывная вектор
функция, удовлетворяющая условиям
Липшица,
![]() –
производная по времени t.
Пусть для некоторого ограниченного
заданного закона управления uo(t),
t ≥ t0,
через начальное состояние
–
производная по времени t.
Пусть для некоторого ограниченного
заданного закона управления uo(t),
t ≥ t0,
через начальное состояние
![]() проходит невозмущенная (опорная,
программная, исходная, желаемая)
траектория
проходит невозмущенная (опорная,
программная, исходная, желаемая)
траектория
![]() и
она единственная в силу решения задачи
Коши. Ставится задача об исследовании
поведения невозмущенной траектории в
случае, если начальное значение
и
она единственная в силу решения задачи
Коши. Ставится задача об исследовании
поведения невозмущенной траектории в
случае, если начальное значение
![]() отличается
от
отличается
от
![]() .
(т.е. имеется «возмущение» по начальным
условиям).
.
(т.е. имеется «возмущение» по начальным
условиям).
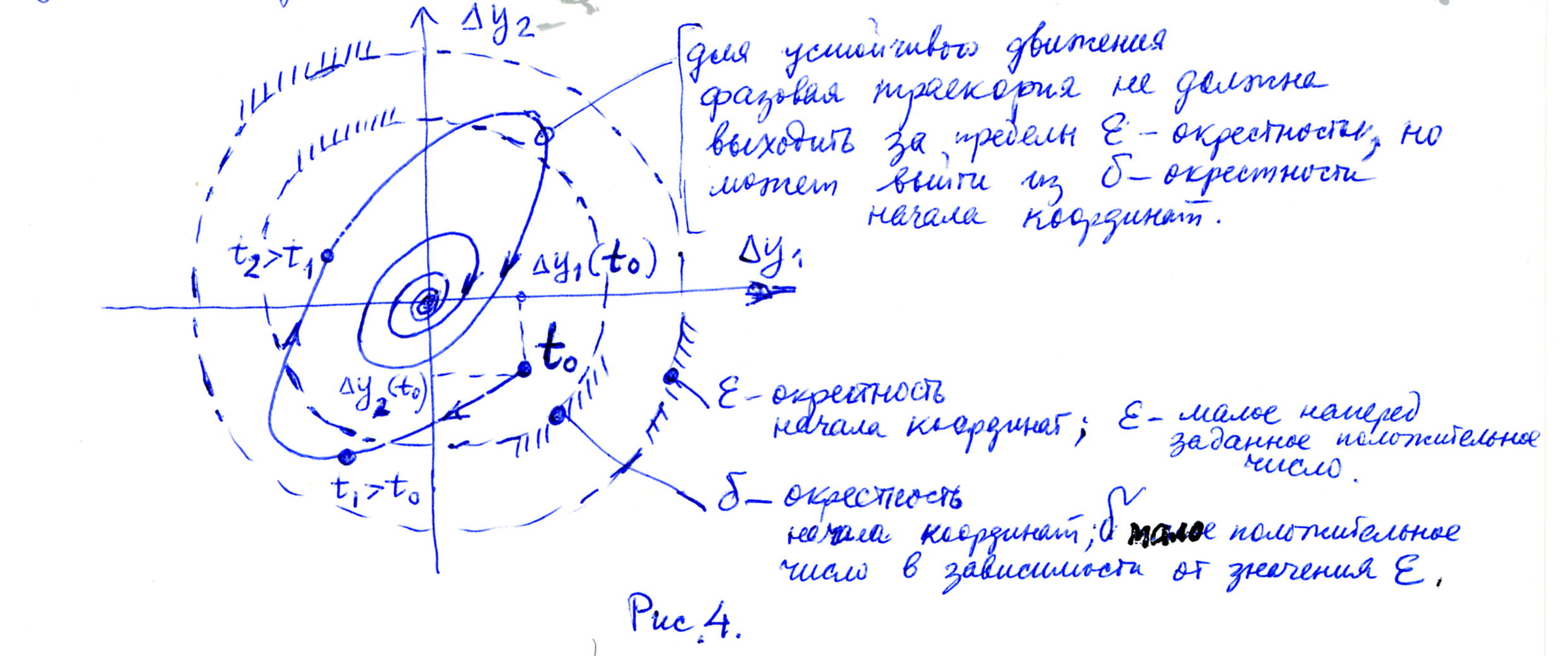
Невозмущенная траектория исходной системы называется устойчивой по Ляпунову, если для любого ε > 0 можно подобрать δ(ε,to) > 0 такое, что для всякого решения y(t) той же системы, начальное значение которого удовлетворяет неравенству
|| y(to)
-
![]() ||
< δ(ε,to)
||
< δ(ε,to)
для всех t ≥ to справедливо
||y(t,y(to),to,uo(t))
– yo(t,![]() ,to,uo(t))||<ε,
,to,uo(t))||<ε,
т.е. близкие по начальным значениям
решения исходной системы остаются
близкими для всех t
≥ to.
Здесь под нормой ||y||
понимается
![]()
Решение y(t,y(to),to,uo(t)),
построенное для заданных начального
условия y(to)
и программного (опорного) управления
uo(t)
называется возмущенным и исследование
устойчивости невозмущенного движения
сводится к анализу свойств решений
возмущенного движения. Для проверки
свойств возмущенного движения
целесообразно сделать замену переменных:
![]()
и задача сводится к проверке на
устойчивость тривиального решения
![]() .
Пример устойчивого тривиального условия
при заданном
.
Пример устойчивого тривиального условия
при заданном
![]() >0
изображен для одной из компонентов
вектора
>0
изображен для одной из компонентов
вектора
![]() на рис. 3.
на рис. 3.

Если
![]() ,
то устойчивость будет асимптотической.
Для случая двух компонент вектора
,
то устойчивость будет асимптотической.
Для случая двух компонент вектора
![]() устойчивое движение изображено на рис.
4 для «возмущения»
устойчивое движение изображено на рис.
4 для «возмущения»
![]()
При определении динамической устойчивости в общем случае возможны возмущения более общего вида чем только отклонение по начальным условиям.
1.2. Управляемость движения.
Под управляемостью ВС понимается его способностью выполнять в ответ на целенаправленные действия пилота или автоматики любой, предусмотренный в процессе эксплуатации маневр (причем наиболее просто при минимальных затратах энергии пилота) в любых допустимых условиях полета, в том числе при наличии возмущений.
Управляемость различают: 1) продольную (относительно OZ) или по тангажу; 2) путевую (относительно OY) или по рысканию; 3) поперечную (относительно OX) или по крену.
В частности, в соответствии с основным определением, продольная управляемость – это свойство ВС переходить с одного продольного невозмущенного (опорного) движения (или режима полета) на другое по воле пилота при его воздействии на органы продольного управления: сектор газа и руль высоты.
Так же как и устойчивость, управляемость различают статическую и динамическую. Для пояснения статической управляемости целесообразно сначала дать определение балансировочных режимов полета.
Балансировочными называются режимы
полета, в которых можно с достаточной
степенью точности не учитывать в опорном
движении, инерционную составляющую
![]() и считать действующие на ВС моменты
«сбалансированными»:
и считать действующие на ВС моменты
«сбалансированными»:
![]() ,
,![]() (в
частности
(в
частности
![]() Отклонения органов управления для
различных классов самолетов можно
выделить следующие по крену:
дифференциальное горизонтальное
оперение (ГО), концевые рули, элевоны,
элероны, флапероны, интерцепторы
(спойлеры), поворотные концевые консоли
крыла, руль направления, управляемое
вертикальное оперение (ВО), струйные
рули, управление вектором тяги, адаптивное
крыло (дифференциальное изменение
кривизны крыла); по курсу: руль
направления, управляемое ВО, поворотный
форкиль (гребень), струйные рули,
управление передней стойкой шасси,
расщепляющиеся рули, носовые рули,
тормоза колес шасси; по тангажу:
управляемое ГО (переднее, заднее),
дифференциальное ГО, элевоны, струйные
рули, управление вектором тяги, триммер,
руль высоты.
Отклонения органов управления для
различных классов самолетов можно
выделить следующие по крену:
дифференциальное горизонтальное
оперение (ГО), концевые рули, элевоны,
элероны, флапероны, интерцепторы
(спойлеры), поворотные концевые консоли
крыла, руль направления, управляемое
вертикальное оперение (ВО), струйные
рули, управление вектором тяги, адаптивное
крыло (дифференциальное изменение
кривизны крыла); по курсу: руль
направления, управляемое ВО, поворотный
форкиль (гребень), струйные рули,
управление передней стойкой шасси,
расщепляющиеся рули, носовые рули,
тормоза колес шасси; по тангажу:
управляемое ГО (переднее, заднее),
дифференциальное ГО, элевоны, струйные
рули, управление вектором тяги, триммер,
руль высоты.
Потребные отклонения органов управления ВС для режима балансировки называются балансировочными.
Под статической управляемостью ВС принимается его способность выполнять в ответ на действия органов управления переход из заданного состояния балансировки в новое состояние балансировки бесконечно близкое к исходному. Оценить качественно статическую управляемость можно для заданного опорного режима полета по значениям потребных для балансировки ВС отклонениям органов управления, перемещениям рычагов управления (штурвала, рычага, управления двигателем и т.д.), усилиям на них и их производным по некоторым из параметров движения.
При оценке динамической управляемости рассматривается характер реакции ВС на отклонение органов управления от их балансировочных значений при переходе от заданного балансировочного режима полета к другому произвольному с учетом возмущений и переходного движения.
Лекция 2. 2. Моменты, действующие на ВС в полете
Результирующий
момент
![]() складывается из аэродинамического
складывается из аэродинамического
![]() и момента тяги
и момента тяги
![]() В проекциях на связанные оси координат
В проекциях на связанные оси координат![]() может быть представлен следующим образом
может быть представлен следующим образом
![]() ,
,
где
![]() -
момент крена;
-
момент крена;
![]() -
момент рыскания;
-
момент рыскания;
![]() -
момент тангажа.
-
момент тангажа.
При этом определяются знаки моментов и соответствующих угловых скоростей вращения ВС по правилу «винта» (по часовой стрелке – положительно, если смотреть из начала координат, обычно расположенных в центре тяжести (ЦТ) или центре масс (ЦМ) ВС.
Правила знаков простейших органов управления показаны на рис. 5.

Обозначения: угловая скорость крена
![]() x,
рыскания
y
– и тангажа –
z,
отклонения управляющих органов: руля
высоты
x,
рыскания
y
– и тангажа –
z,
отклонения управляющих органов: руля
высоты
![]() ,
управляемого (перестановочного)
стабилизатора
,
управляемого (перестановочного)
стабилизатора
![]() ,
руля направления
,
руля направления
![]() ,
элеронов обычных (концевых)
,
элеронов обычных (концевых)
![]() ,
элеронов корневых
,
элеронов корневых
![]() ,
элевонов
,
элевонов
![]() ,
закрылков
,
закрылков
![]() ,
щелевых интерцепторов: корневого левого
,
щелевых интерцепторов: корневого левого
![]() ;
среднего левого
;
среднего левого
![]() ;
корневого правого
;
корневого правого
![]() ;
соответственно в/н для верхних и нижних.
В случае дифференциального отклонения
каких-либо органов управления значения
их углов указываются раздельно для
правых и левых. На рис 5. знаком +
указаны положительные
значения углов, угловых скоростей,
моментов, перемещений, усилий.
;
соответственно в/н для верхних и нижних.
В случае дифференциального отклонения
каких-либо органов управления значения
их углов указываются раздельно для
правых и левых. На рис 5. знаком +
указаны положительные
значения углов, угловых скоростей,
моментов, перемещений, усилий.