

6.4.2. Реакция вс на отклонение руля направления
Передаточные функции, описывающие переходные процессы по и , с использованием полной системы (4.9) имеют вид:
 ;
(6.30)
;
(6.30)
где:
 ;
;
 ;
;
 , (6.31)
, (6.31)
где
![]() ;
;
 и обычно обозначают
и обычно обозначают
 ,
который вычисляется по формуле (6.29) при
замене в ней
,
который вычисляется по формуле (6.29) при
замене в ней
![]() на
на
![]() в выражениях производных. Характер
переходного процесса по
в зависимости от
в выражениях производных. Характер
переходного процесса по
в зависимости от
![]() аналогичен тому, что показано на рис.
36. Переходный процесс по
аналогичен графику переходной функции
колебательного звена. Основные показатели
переходных процессов рассчитываются
так же, как показано в разделе (5.3.2.) при
подставке вместо
аналогичен тому, что показано на рис.
36. Переходный процесс по
аналогичен графику переходной функции
колебательного звена. Основные показатели
переходных процессов рассчитываются
так же, как показано в разделе (5.3.2.) при
подставке вместо
![]() и
и
![]() соответственно величин
соответственно величин
![]() .
.
7. Особенности динамики пространственного движения
При движении в самом общем случае (нестационарные нелинейные режимы, сваливание, штопор и др.) учитываются четыре вида взаимодействия:
кинематическое, обусловленное наличием , т.к. при вращении ВС относительно ОХ производит циклическое изменение и . Такое взаимодействие особенно ярко выраженное для спортивных и других маневренных самолетов .Для ВС – в меньшей степени.
аэродинамическое, определяемое влиянием на аэродинамические характеристики бокового движения.
гироскопическое, обусловленное появлением дополнительных гироскопических моментов, если ось вращения ротора ТРД или ТВД не совпадает с осью вращения ВС;
инерционное, из-за появления дополнительных инерционных моментов, когда ось вращения ВС не совпадает ни с одной из главных осей инерции.
Поскольку ВС не является высоко маневренным самолетом, то наибольшее влияние из вышеперечисленных факторов в области нормальной эксплуатации ВС на динамику движения оказывают первые два. Вне области нормальной эксплуатации ВС (ошибки пилотирования, отказы в системе управления, особо интенсивные внешние возмущения и др.) весьма опасны так называемые критические режимы. Для современных самолетов наиболее характерны следующие критические формы движения: сваливание, штопор, аэроинерционное самовращение, срыв, самопроизвольное кренение. Два первых свойственны как дозвуковым, так и сверхзвуковым ВС И возникают из-за потери устойчивости и авторотации на больших околокритических и закритических углах атаки. Аэроинерционное самовращение (инерционное вращение) характерно для скоростных маневренных самолетов и возникает при превышении критической угловой скорости крена. Срыв самолета связан с потерей боковой (флюгерной) устойчивости и возникает, как правило, при превышении эксплуатационных чисел М полета. Самопроизвольное кренение возникает при превышении эксплуатационных значений индикаторной скорости Vi (скоростного напора) и связано с развитием упругих деформаций и часто с реверсом элеронов.
Рассмотрим несколько подробнее особенности сваливания и штопора.
7.1. Сваливание.
Сваливанием ВС называют непроизвольное
быстро развивающееся движение со
значи-тельной угловой скоростью и
амплитудой, не парируемое летчиком,
обусловленное потерей устойчивости на
больших околокритических и критических
углах атаки. Причины несим -метричных
срывов на поверхности крыла: наличие
![]() ,
конструктивной нежесткости. На рис.37
показано влияние
на величину угла атаки сваливания
,
конструктивной нежесткости. На рис.37
показано влияние
на величину угла атаки сваливания
![]() .
.
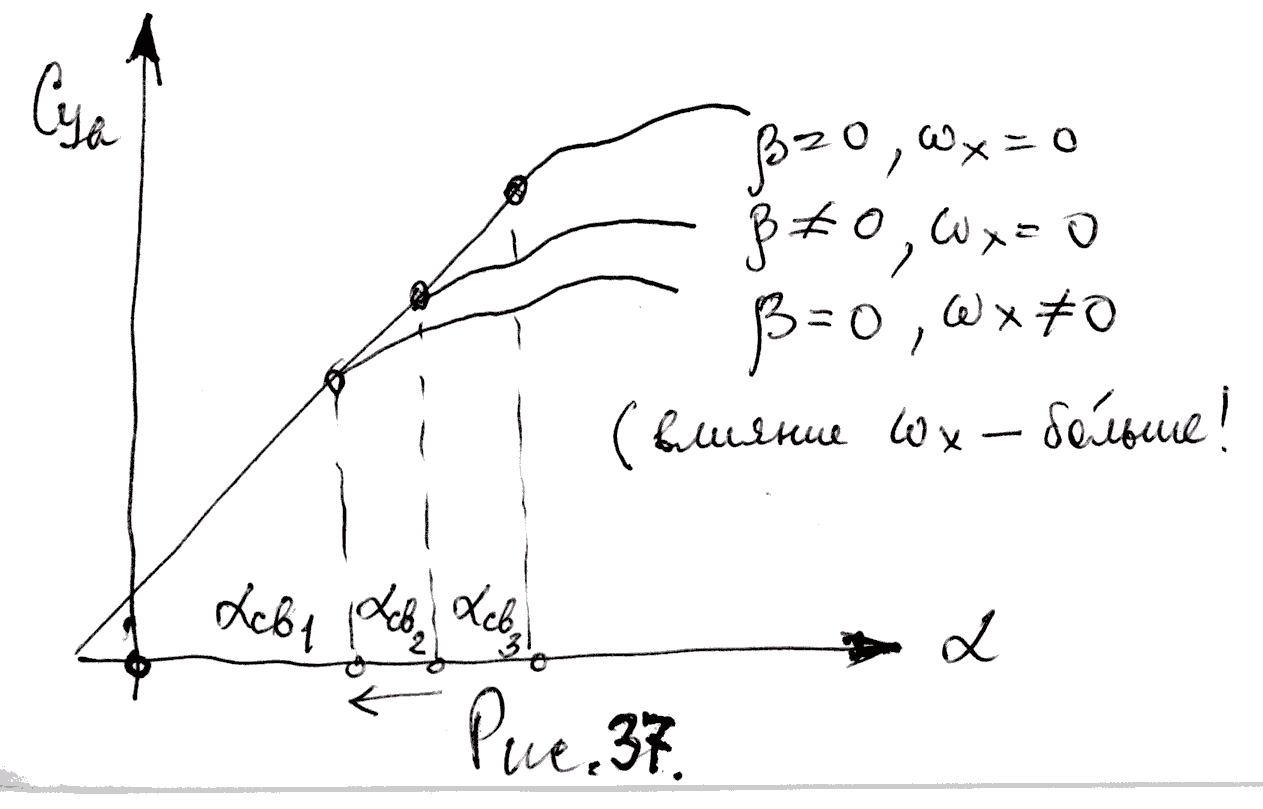
При полной симметрии срывов потока на верхней поверхности крыла, возможно, очень редко, симметричное сваливание на нос.
Виды сваливания:
1) сваливание на нос;
2) сваливание на крыло с пространственным апериодическим движением;
3) сваливание с резким разворотом по курсу с пространственным апериодическим движением;
4) сваливание с интенсивным кабрированием и пространственным апериодическим движением;
5) сваливание колебательное;
6) глубокое сваливание.
Лекция 11. 7.2. Авторотация
В начальный момент сваливания ВС
приближается по углу атаки, близком к
критическому, и при
![]() при наличии
при наличии
![]() вместо демпфирующих (тормозящих вращение)
моментов крена и рыскания возникают
авторотирующие (раскручивающие) моменты.
вместо демпфирующих (тормозящих вращение)
моментов крена и рыскания возникают
авторотирующие (раскручивающие) моменты.
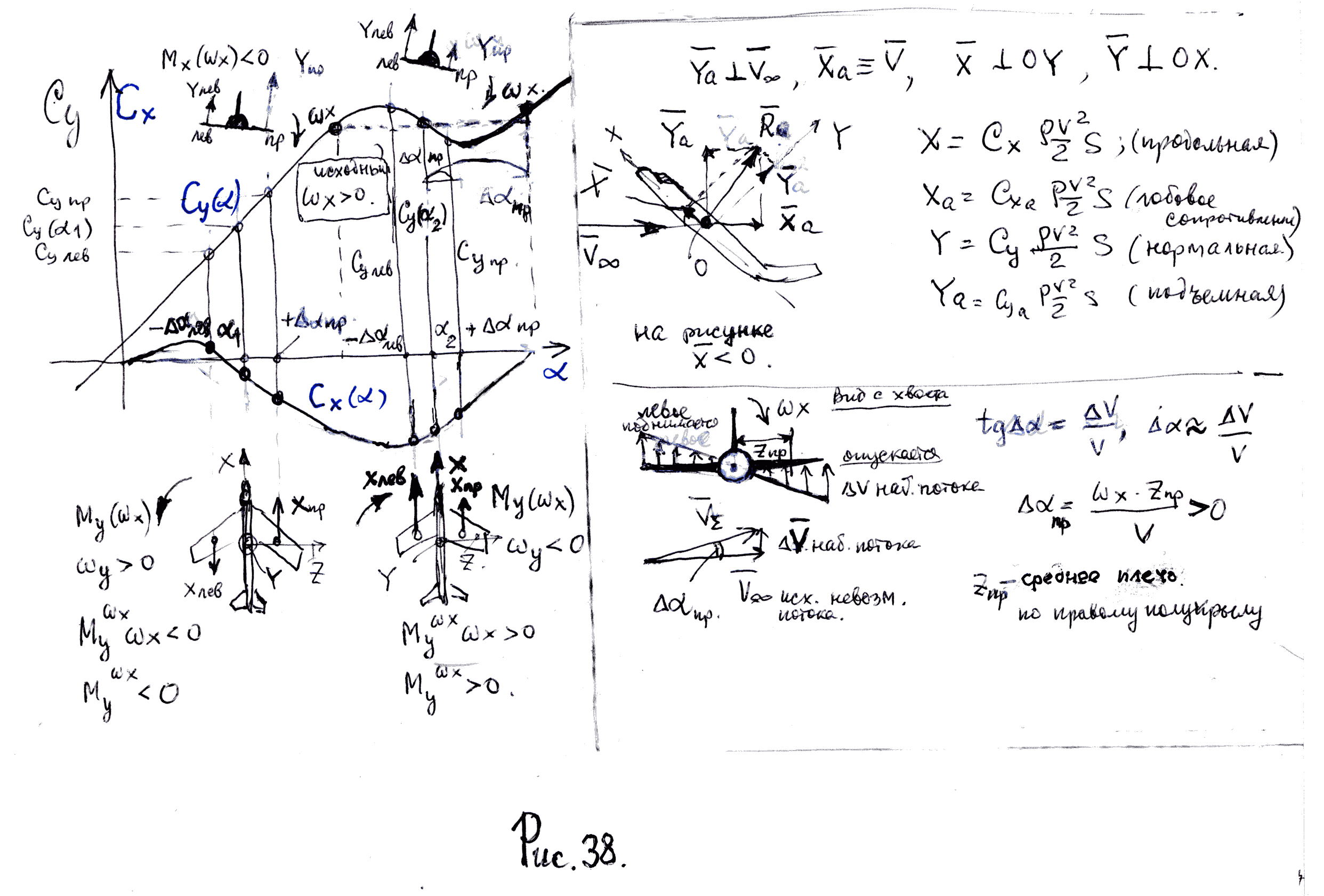
Рассмотрим движение при
![]() и
и
![]() с угловой скоростью
с угловой скоростью
![]() (правое полукрыло опускается). На
опускающемся полу крыле всегда угол
атаки увеличивается на величину
(правое полукрыло опускается). На
опускающемся полу крыле всегда угол
атаки увеличивается на величину
![]() ,
при этом коэффициент нормальной силы
до
,
при этом коэффициент нормальной силы
до
![]() увеличивается, а при
сначала уменьшается, а затем может снова
увеличиваться в зависимости от величины
увеличивается, а при
сначала уменьшается, а затем может снова
увеличиваться в зависимости от величины
![]() .
На рис.38 при
.
На рис.38 при
![]() ,
,
![]()
![]() и
и
![]() ,
т.е.
,
т.е.
![]() ,
следова-тельно, момент – демпфирующий.
При
,
следова-тельно, момент – демпфирующий.
При
![]() и малых
и малых
![]() ,
,
![]() ,
,
т.е.
,
,
т.е.
![]() и момент – авторотирующий; при этом
же исходном
и больших
может оказаться, что момент станет снова
демпфирующим.
и момент – авторотирующий; при этом
же исходном
и больших
может оказаться, что момент станет снова
демпфирующим.
![]() .
В результате в зависимости от исходного
.
В результате в зависимости от исходного
![]() и значений
и значений
![]() можно построить «диаграмму авторотации»
(см. рис. 39).
можно построить «диаграмму авторотации»
(см. рис. 39).
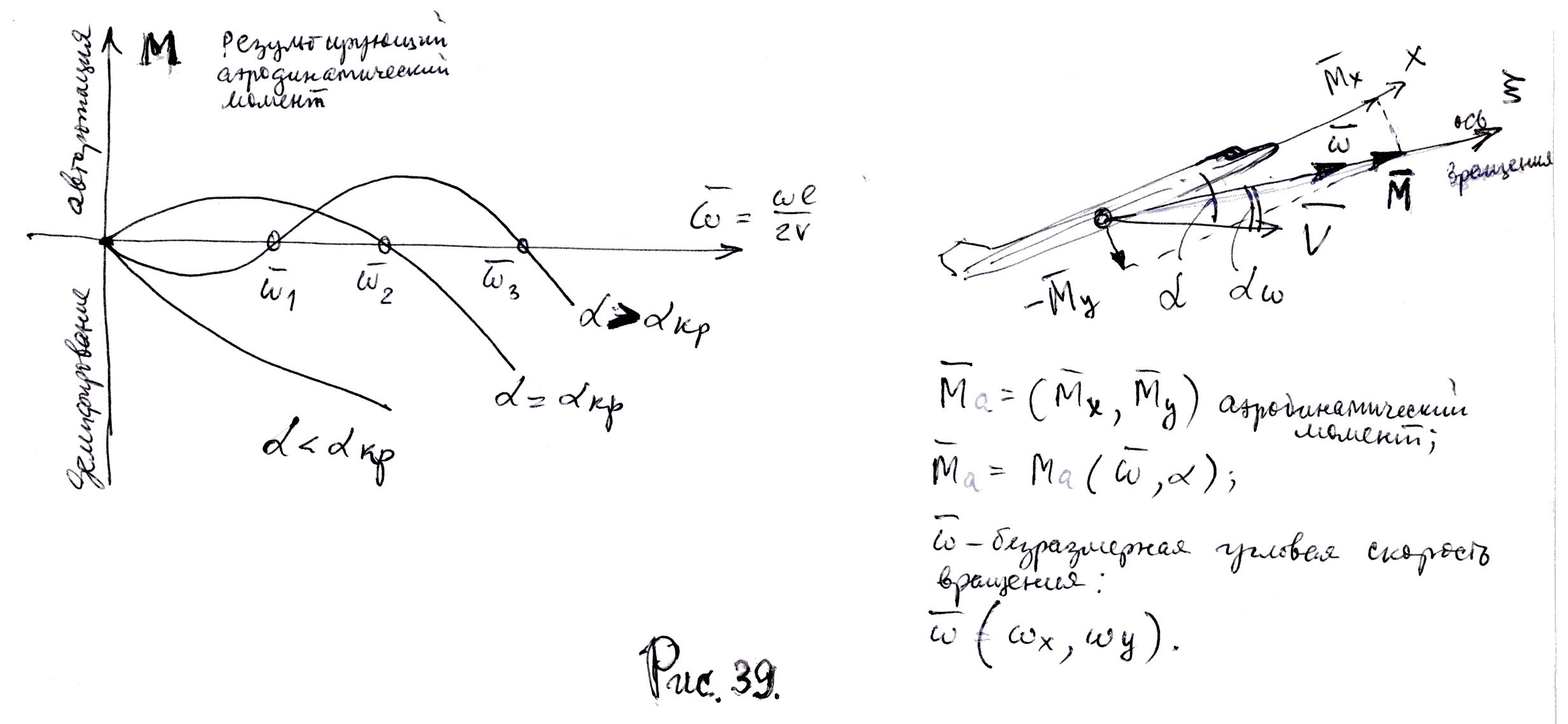
Установившееся вращение будет в
точках
![]()
![]() ,
,
![]() ,
,
![]() ;
при этом, при
1
- будет неустойчивое вращение, а при
и
- устойчивые режимы вращения, что не
трудно проверить по методу малых
возмущений. Эту диаграмму можно
перестроить в координатах
;
при этом, при
1
- будет неустойчивое вращение, а при
и
- устойчивые режимы вращения, что не
трудно проверить по методу малых
возмущений. Эту диаграмму можно
перестроить в координатах
![]() .
В результате получаем зависимость
.
В результате получаем зависимость
![]() ,
в которой в диапазоне углов атаки от
,
в которой в диапазоне углов атаки от
![]() до
до
![]() будут два режима установившейся
авторотации; на меньших
- неустойчивое вращения; при
-
больших – устойчивое вращение. Этот
особый случай называется латентной
(скрытой) авторотацией.
будут два режима установившейся
авторотации; на меньших
- неустойчивое вращения; при
-
больших – устойчивое вращение. Этот
особый случай называется латентной
(скрытой) авторотацией.
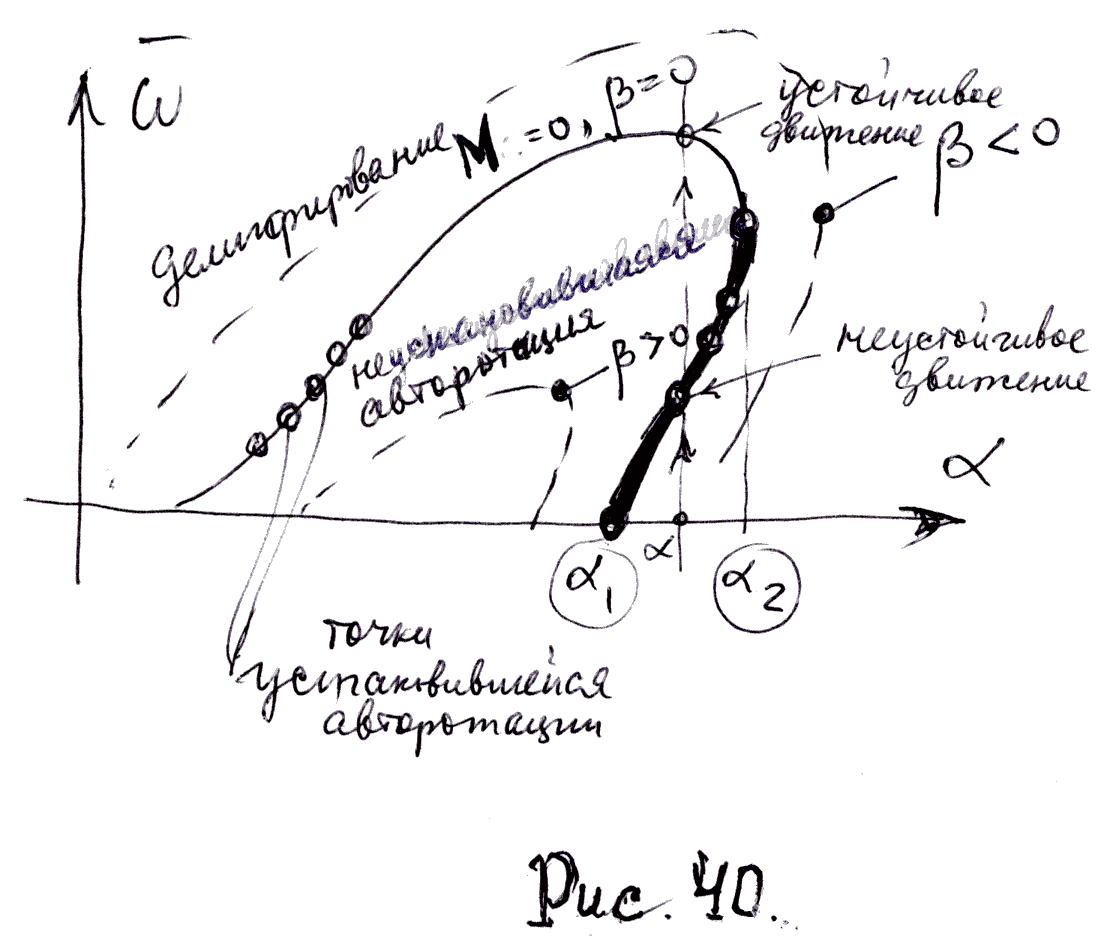
При изменении скольжения
![]() происходит расширение/ сужение области
неустановившейся авторотации.
происходит расширение/ сужение области
неустановившейся авторотации.